基于ADIS16300的汽车方向盘自由转动量测量系统设计
2014-01-15 09:59冯贤超赵祚喜可欣荣
电子设计工程 2014年15期
冯贤超,赵祚喜,可欣荣,胡 炼
(1.鹤山市长安机动车检测站 广东 鹤山 529700;2.华南农业大学工程学院 南方农业机械与装备关键技术教育部重点实验室,广东 广州 510642)
汽车方向盘自由转动量必须合适,过大会造成转向不灵敏,过小会造成转向过于灵敏容易造成失控。GB7258-2012《机动车运行安全技术条件》6.4规定:1)最大设计车速大于等于100 km/h的机动车应小于等于15°;2)三轮汽车应小于35°;3)其他机动车小于等于 25°[1]。目前方向盘自由转动量测量方面主要通过编码盘测量,如ZL-1L型设备等,这类测量仪体积大、安装不便。文中旨在通过ADIS16300传感器和cortex-M3处理器,设计一种轻便、高精度且低成本的汽车方向盘自由转动量测量系统。
1 惯性传感器ADIS16300
1.1 ADIS16300功能介绍
ADIS16300 MEMS传感器是Analog Devices生产的三轴加速度计和单轴陀螺仪集成惯性测量元件,工作温度范围为-40~+85℃,工作电压为 4.75~5.25 V。 可在±180°的全向范围内精确测量俯仰角和滚动角。传感器经过全面校准和测试,可保证三个轴高度对齐,并在整个运动范围内实现0.1°的倾斜测量精度,且不受安装方向的影响[2]。ADIS16300采用23 mm×31 mm×7.5 mm模块封装,结构简单、安装方便。
1.2 ADIS16300数据读取
ADIS16300具有自校正功能,传感器测量将原始信号经过校准和数字信号处理后存入输出寄存器供外部器件经SPI接口读取。每个采样周期结束后,传感器测量结果存放至输出寄存器,并且DIO1引脚向器件外产生一个脉冲,表示一个完整的新惯性测量数据已经采集准备好,可供外部SPI主控器读取。从SPI总线上读取到的传感器数据是二进制数据或二进制补码形式的数据,需要进行解读才能得到实际输出数值。传感器输出的各个值代表的意义可在ADIS16300数据手册中的Out Put Register Format查询[2],并通过以下公式进行解算:

式中的DATA_Value为寄存器输出的数据;Value为转换后实际的测量量的值;Scale为寄存器值最小值代表的最小单位;n为对应寄存器的数据位数。
2 方向盘转动量测量原理
ADIS16300能够测量包括Z轴的转动角速度、XYZ三轴的加速度等运动参数。其测量倾角的基本原理是利用重力加速度与其在加速度传感器测量轴上的加速度分量,通过三角函数关系,求得传感器的倾斜角度。测量的前提条件是保证测量动作平缓,即不要让ADIS16300受到运动加速度影响。
2.1 单轴倾角测量方法
从图1可以知道,当传感器排放到如图 1(a)所示位置时,X轴向加速度分量与重力加速度的关系为:

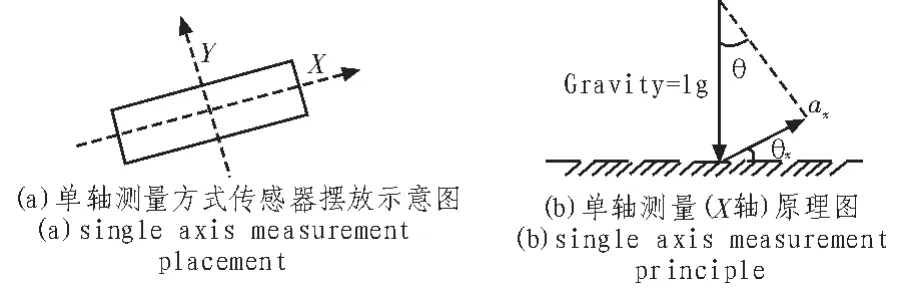
图1 单轴测量方式Fig.1 Single axis measurement
式中的ax为重力加速度在X轴方向的加速度分量,1g重力加速度,由此可得出倾角为ax和重力加速度1g比值的反正弦,即:

由正弦曲线特性易知,单轴测量倾角的方法在-45°~45°之间具有良好的精度,但超过这个范围之外的测量精度下降(正弦曲线斜率变小),且单轴测量方式无法做到360°全范围的倾角测量[5]。
2.2 双轴倾角测量方法
在双轴倾角测量方式中,采用两个互相垂直的X/Y轴轴向加速度分量,且将传感器保持在一个固定的平面上,如图2(a)中位置。则根据X轴和Y轴方向的重力加速分量互相垂直的关系,得到式(4)的关系:

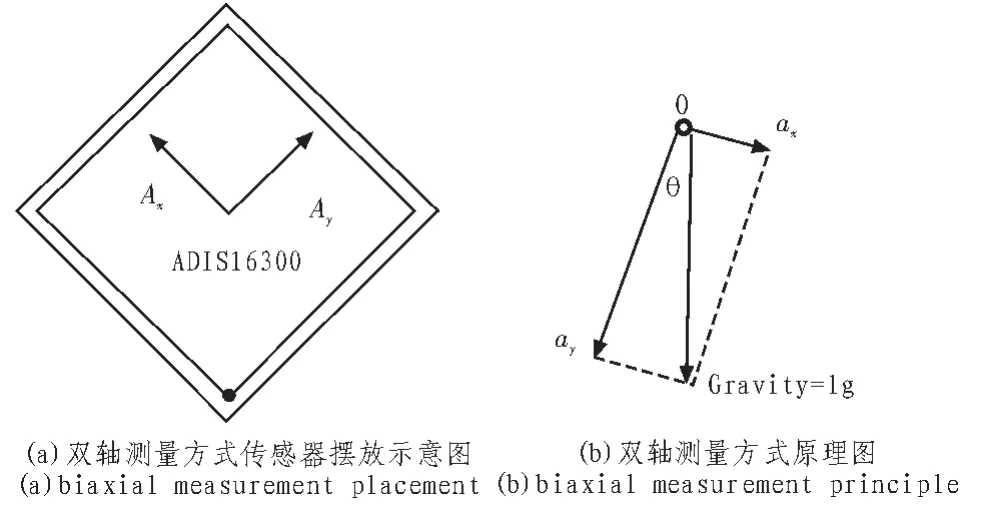
图2 双轴测量方式Fig.2 Biaxial measurement
式中的ax与ay分别为传感器通过测量所得到的分量值,因而可以得到传感器在XY平面的倾角为:

这样,从式(5)得到双轴倾角测量方式在360°范围都可以得到比较高的测量精度 (需要根据二个测量分量确定象限),并且可以分辨全圆周内任何角度,从而解决测量过程中的翻转问题。
2.3 方向盘自由转动量的测量原理
如图3(a)所示为方向盘坐标分析,因为汽车转向系要求驾驶员在转动方向盘时能有直观连续的反馈和稳定的输出,所以汽车方向盘会绕着固定角度的传动轴Z轴转动[7],在转动过程中方向盘所在的XY平面与传动轴始终保持垂直。
如图3(b)示,根据方向盘的结构特点,方向盘自由转动量可通过测量方向盘自由转动过程中,到达左右极限点t1、t2时的方向盘转动倾角 θ1和 θ2,再通过公式(6)计算得出方向盘自由转动量θ:

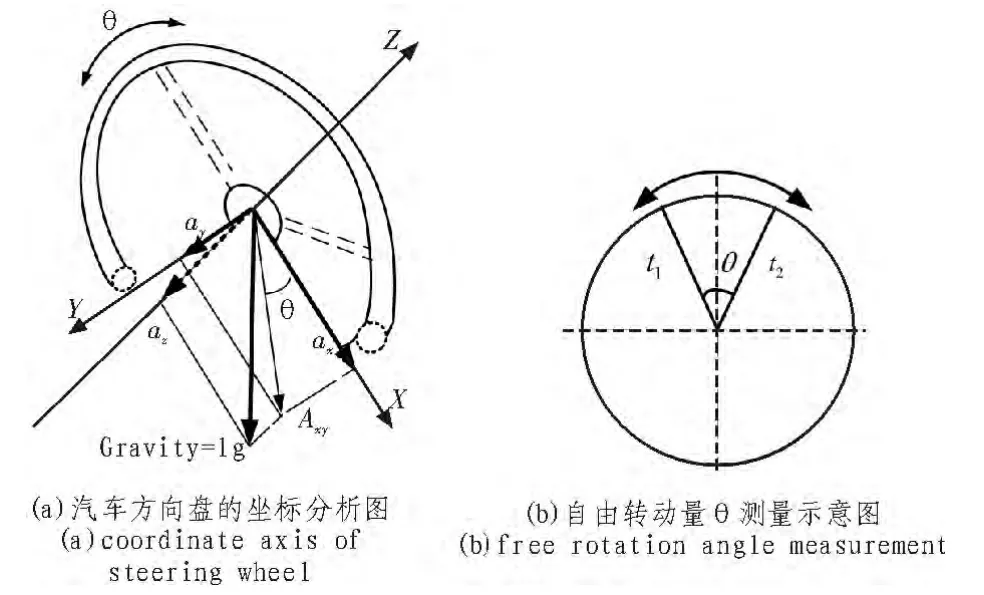
图3 方向盘自由转动量测量分析Fig.3 Free rotation measurement analysis
3 方向盘自由转量测量系统设计
3.1 硬件电路设计
系统通过ST公司的STMF103VBT6处理器与ADIS16300组建方向盘转动量测量系统。其中STMF103VBT6是一款高性能低成本的32位cortex-M3内核微处理器,有丰富的外设功能,包括模/数转换(DAC),串口通信(USART)、CAN总线和同步串行接口 (SPI)等[4],功能强大。
ADIS16300内置的SPI通信接口可以实现与STMF103 VBT6处理器硬件通信,硬件连接如图4所示。
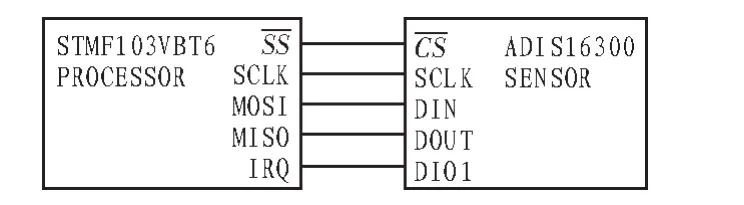
图4 STMF103VBT6与ADIS16300的SPI总线连接图Fig.4 The SPI bus connection diagram
方向盘自由转动量测量系统能根据ADIS16300数据迸发模式[9],使处理器在连续的10个时钟周期内通过ADIS16300的DOUT引脚读取陀螺仪数据、XYZ轴数据和环境温度等数据,并通过CAN总线通信协议把所有数据输出上位机上显示出来。
3.2 软件设计
如图5所示,程序启动首先进入系统初始化,接着系统对ADIS16300写工作指令,设置ADIS16300的工作模式,然后系统等待接收信号标志,通过SPI总线接收传感器发出的原始数据并进行解读出当前倾角值,最后通过CAN总线将处理后的数据发至上位机。
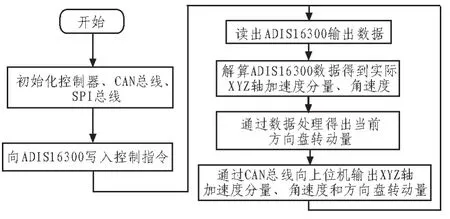
图5 系统软件流程框图Fig.5 Flow chart the software design
4 实验数据结果
选用经过标定的ZL-1L型方向盘转动角度测量仪作为方向盘自由转动量测量对照。实验开始之前先对方向盘调中位,安装好ZL-1L型设备于方向盘上,再将ZL-1L型设备与ADIS16300固定在同一平台上,如图6所示。

图6 ZL-1L型设备与ADIS16300安装实物图Fig.6 ZL-1L and ADIS16300 installation
ADIS16300的XY平面与ZL-1L型设备的测量平面平行,ZL-1L型设备的测量转动轴与ADIS16300的Z轴平行。使用ZL-1L型设备往左施加5个单位扭矩使得方向盘转至左自由极限并记录转动角θ1,再往右施加5个单位扭矩使得方向盘转至右自由极限并记录转动角θ2,按照公式(6)解算出方向盘的转动量θ,将系统解读的当前转动量θ和ZL-1L型设备输出数据的结果对比,如图7(a)示。
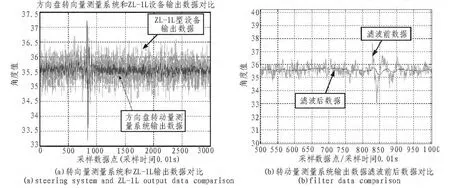
图7 方向盘转动量测量系统输出数据对比图Fig.7 The measurement data comparison
从图7(a)中可以看出,方向盘转动量测量系统输出的方向盘转角测量值与ZL-1L型设备输出转动值趋势基本吻合,其中通过ADIS16300求解出自由转动量平均值为35.43°,ZL-1L型设备的均值为35.62°,但是ADIS16300输出数据的波动较少。实验中分别进行了多组数据的测量,普遍存在:均值和趋势基本一致,但ZL-1L型设备输出数据波动较大的情况。主要原因分析:ZL-1L型设备使用编码盘作为角度测量传感器,测量精度为±2°[8],本系统使用的ADIS16300传感器通过测量重力加速度在XY轴分量求解角度的方式进行测量,这种方式测量精度相对较高,所以在静态测量中结果波动相对较小。但方向盘转动量测量系统输出数据还是有一定的噪声的,滤波处理可以得到更好的结果,ADIS16300内部有可编程的低通滤波器,可以方便地实现这一个功能,如图(b)示。
5 结 论
本系统是在静止状态下测得的方向盘转动量通过跟经标定的ZL-1L型设备进行对比,从数据上看是达到高精度测量的要求,而且结构相对更简单,达到设计的目的。
通过ADIS16300内置的低通滤波器实现方向盘转动量测量系统输出数据的平滑化,数据输出更加稳定。
[1]机动车运行安全技术条件.GB7258.[S]2012.
[2]AnalogDevices,INC.ADIS16300datasheet.(2009-04).http://www.analog.com/static/imported-files/data_sheet/Adis16300.pdf.
[3]陈永冰,钟斌.惯性导航原理[M].北京:国防工业出版社,2007.
[4]STMicroelectronics,INC.STM32F103X6datasheet.[2004-11].http://www.st.com/stonline/products/literature/ds/13587.pdf.
[5]白占元,徐皑东.基于MEMS的倾角测量仪设计[J].仪器仪表学报,2007(8):16-18.BAI Zhan-yuan,XU Ai-dong.Design of tilt-meter based on MEMS[J].Chinese Journal of Scientific Instrument,2007(8):16-18.
[6]郝骞,冯敦超.基于MEMS传感器技术的倾角测量仪设计[J].电子测试,2013(5):12-13.HAOQian,FENGDun-chao.Designoftiltmeasuringinstrument based on MEMS sensor technology[J].Electronic Test,2013(5):12-13.
[7]周一鸣主编.汽车拖拉机学:汽车拖拉机理论[M].北京:中国农业大学出版社,2000.
[8]淄博科创电子有限公司.ZL-1L型方向盘转动角度测量仪说明书[S].2010.
[9]胡炼,赵祚喜.ADIS16300四自由度IMU在姿态测量中的应用[J].电子设计工程,2010(7):103-106.HU lian,ZHAO zuo-xi.4DoF IMU ADIS16300 and its application in attitude measurement[J].Electronic Design Engineering,2010(7):103-106.
猜你喜欢
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
电子制作(2018年11期)2018-08-04
知识经济·中国直销(2018年3期)2018-04-12
传媒评论(2017年8期)2017-11-08
空间控制技术与应用(2015年2期)2015-06-05
汽车零部件(2014年5期)2014-11-11