远距离红外目标探测系统的研究与设计
2014-01-15 09:59董雪峰陈万里
电子设计工程 2014年15期
董雪峰,陈万里,王 勇
(1.黄河科技学院 河南 郑州 450063;2.中原电子技术研究所 河南 郑州 450015)
当红外热成像系统探测远距离目标时,目标在红外焦平面上成像很小,以至目标像的张角小于或等于系统的瞬时视场,造成目标的可检测信号相对较弱,特别是在复杂背景干扰下,目标甚至被大量复杂的噪声所淹没,图像信噪比极低,使目标检测工作变的非常困难,因此,提高系统对噪声背景中红外小目标的检测和跟踪能力,对红外成像跟踪系统在较远距离发现并稳定跟踪目标具有重要意义。
1 地面红外目标的红外辐射特性
红外成像跟踪系统对处于不同背景中目标的探测和识别取决于目标本身和背景的红外辐射特性的差异。目标和背景的红外辐射特性主要由它们本身的特性、工作状态、所处的环境及探测的时间因素等决定[1-2]。
地面目标包括工厂、桥梁、房屋等固定目标和汽车、行人等运动目标。地面运动目标的不同部位有不同的辐射能量,例如汽车的排气管、发动机外壳辐射能量最强。地面固定目标红外辐射特性较为复杂,不同的建筑材料有不同的红外辐射特性,因此,对于与地面背景的红外辐射特性较为接近的目标,红外检测较为困难,相对而言地面活动目标则较容易检测。
地面背景辐射由反射、散射的太阳光和自身的热辐射组成。辐射的光谱特性有两个峰值,其一是由太阳辐射产生,其二是由地面自身的热辐射产生。影响地面温度分布和辐射特性的因素很多,如地面的起伏、土壤类型、植被类型、土壤湿度等。要精确计算自然地表的温度和红外辐射特性,必须建立考虑各种影响因素的多维模型,其工作量是巨大的和不确定的。
2 远距离地面红外目标的探测概率
从能量的角度分析,只要信号足够大就能探测到目标,即要求信噪比达到探测阈值。
假设红外成像系统的光学系统衍射、像差和色差带来的像斑弥散比探测器单个像素尺寸小,并且像斑弥散全部落在一个探测器像素上,目标足够远,目标视线张角远小于探测系统的瞬时视场,设定目标大小为A×A,探测器元素大小为B×B,τ为大气透过率,τ0为光学系统透过率,R为目标探测器距离,LT为目标法向辐射亮度,D为光学系统口径,f为探测系统带宽,则目标像所在探测器元素接收之辐射功率与背景探测器元素接收之辐射功率之差Δp可以简化为

根据探测系统信噪比SNR与探测器探测率D*的关系,有

在信号检测中,门限的选择应综合考虑探测概率和虚警率。门限值设置越低,虽然可以提高探测概率,但是虚警率同时提高。在门限值一定的情况下,单次探测概率P依赖于探测系统的信噪比,信噪比越高,探测概率越大。从以上公式所示,当目标距离、体积、大气特性等固定时,提高光学系统透过率、增加光学系统口径和降低探测系统带宽,可提高系统信噪比,提高系统对点目标的探测概率[3]。
实际的光学系统,由于衍射、像差和色差的存在,其调制函数不是一个常数,目标成像大小不能简单的按照几何光学规律求取,而是在几何成像基础上存在一定的弥散扩散,在弥散区域内,越靠边沿能量越低,能量密度可以近似高斯分布。由于探测器像元存在间隔,对于小阵列探测器和通过光机扫描方式成像的红外成像系统,其填充系数基本上可以认为100%,但对于凝视焦平面红外热像仪产品,其填充系数基本上小于100%。当像斑的一部分或全部落在探测器之间的空隙处,此处的红外光能量不会产生电信号响应。
设定W为信号最强的探测器元素接收的辐射功率与总的辐射功率的比值,S为探测器一个像元和间隙的面积,则实际状态探测概率ps可以表示为:

根据以上分析,探测器像元间隙越大,对探测概率的影响越大。像斑边沿能量的衰减和空隙的影响,红外成像系统对目标的探测信噪比和探测概率必然比理想状态有一定的降低。因此,在地面红外目标探测系统设计中,必须提高光学系统的设计,减少衍射、像差和色差带来的像斑弥散,并且选用填充系数较高的红外成像探测器。
3 远距离红外目标探测系统设计
根据前述分析,远距离红外目标探测跟踪系统架构框图如图1所示。
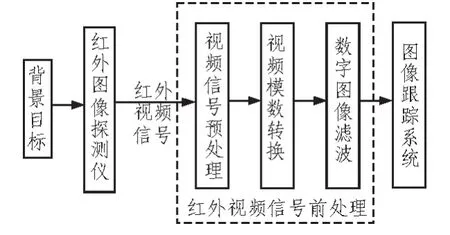
图1 红外木条探测系统结构图Fig.1 The diagram of infrared target detection system
红外图像探测器主要由红外光学、镜头、焦平面探测器和处理电路组成,红外图像探测器接收外界背景目标的信息,产生标准的视频信号,在视频信号预处理部分实现模拟部分的滤波、放大和图像增强,同时产生系统同步信号[4]。
视频A/D转换芯片可供选择的种类比较多,如SAA7111、BT218、AD9200等,本设计系统选择AD9200芯片。
数字图像滤波是目标检测和跟踪系统的重要部分,虽然在红外探测器的选择和光学系统的设计上采取措施,可以起到抑制背景干扰和改善探测概率的作用,但图像中存在大量的高斯热噪声与目标混淆在一起,采用数字图像滤波是红外跟踪系统必不可少的组成部分。根据仿真效果和电路设计的可行性,滤波电路设计采用XILINX公司的Virtex-E系列的XCV600E实现自适应滤波和空间滤波算法。
3.1 自适应高通滤波
自适应高通滤波即采用自适应门限和高通滤波相结合的方式实现红外图像滤波处理。高通滤波算法为线形运算,原理简单,易于实现。远距离背景中细节成分较少,在大部分情况下,背景比较平缓,像素之间存在强相关性,背景图像占据空间频率的低频分量,目标强度高于背景,更多与图像频谱的高频分量相对应,利用背景像素之间的相关性,目标与背景灰度的无关性,在图像空间做空间域或频域高通滤波,对于目标点和孤立噪声点,容易通过高通滤波器,而对于有一定成像均匀度的背景,不容易通过。在FPGA内部使用空间域卷积方法进行高通滤波,其冲激响应方阵如下:

高通滤波后选择合适的门限把目标和孤立噪声点提取出来是关键问题,采用统一门限不利于目标与孤立噪声的分离,引起分割的目标候选点过多,在实际设计中采用自适应门限的方法,通过目标周围小区域背景计算自适应门限,实际应用中可以较好分割出标,同时利用目标的场间相关性和噪声点的无关性,进一步滤除孤立噪声点[5]。
3.2 空间匹配滤波算法
在没有任何假设的前提下,对非平稳背景中的任意目标没有最佳的线形检测算法,但是对于淹没在近似高斯分布杂波中的已知响应分布的目标,通过匹配滤波算法,可以达到接近最佳的检测效果,匹配滤波算法原理如下分析。
设图像 g(x,y)中包含所需图像 f(x,y)和噪声 n(x,y),信号形式为:

若 g(x,y)经过函数 h(x,y)求卷积,且设 h(x,y)=f(x-x0,y-y0),搜索系统输出信噪比为最大处的(x0,y0)即为匹配点,式中选 h(x,y)为 f(x,y)相对某点(x0,y0)的镜象,在 g(x,y)上滑动,寻找输出信噪比最大处,可以说明该位置有所需图像f(x,y)存在。
图像向量表示形式为

f为目标图像向量,n为零均值噪声向量,匹配滤波器是g与匹配滤波向量h的内积,得到具有最大信噪比的标量输出f0为

经匹配滤波后的输出图像信噪比SNR为没有噪声时的输出信号功率Ps和输出噪声功率PN的比值

式中KN为噪声向量的协方差矩阵。对h求导,经过归一化处理后,得出最佳匹配滤波向量hd为

匹配滤波器输出为

由以上分析可见,滤波器的最佳匹配滤波向量的获得同时依赖于目标信号的强度分布和噪声向量的协方差矩阵的确定,因此,选择合适的目标信号形式,并针对不同的图像杂波背景求出局域协方差矩阵,是设计匹配滤波器的关键。匹配滤波器同时考虑了目标的响应分布与背景杂波特性,能够最大程度的提高图像的信噪比,对红外杂波背景有较好的抑制效果。
3.3 图像跟踪系统
为实现目标的准确检测和跟踪,通过滤波预处理后的数字图像需要在高速中央处理器内进行实时解算,综合决策得出地面红外目标的极性、中心偏移量等目标信息,因此系统的运算量大、实时性较强[6]。
为满足系统对数据处理的特殊需求和易于调试等设计要求,图像跟踪系统硬件设计采用模块化、主从结构实现。主机采用工业计算机,从机采用TI公司的高速DSP设计,主、从机采用高速PCI总线实现数据交换。图2所示为目标跟踪系统结构图。
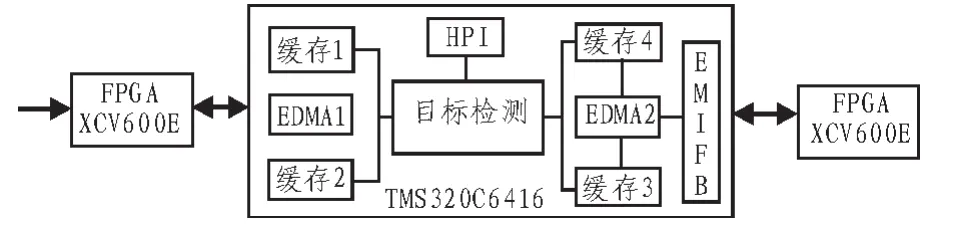
图2 目标跟踪系统结构图Fig.2 The target tracking system structure diagram
图像跟踪核心处理器采用TI公司的TMS320C6416芯片,该器件在设计针对的是多通道无线通讯和有线通讯的应用,具有高速数据处理能力和出色的对外接口能力,在图像处理等领域具有非常大的应用潜力。如图2所示,DSP通过EDMA通道读取FPG A传送的经前处理后的红外图像,运行跟踪目标的检测算法程序,并把处理后提取的目标数据与原始红外视频图像数据再次通过FPG A传送给主机。
4 结 论
根据对红外背景目标的红外辐射特性分析和目标探测概率的计算和分析,对于不同使用目的的红外探测跟踪器可以进行不同光学系统设计和探测器的选择,从而提高探测器对目标的探测概率。两种红外目标滤波算法对背景干扰和噪声干扰有较好的滤波性能,对于地面背景起伏很大的弱小目标,串联使用以上两种滤波算法,可以达到一定的抑制背景干扰的效果。
[1]乔立永,徐立新,高敏.红外目标识别图像复杂度度量方法综述[J].红外技术,2013(2):88-96.QIAO Li-yong,XU Li-xin,GAO Min.Survey of image complexity metrics for infrared target tecognition[J].Infrared Technology,2013(2):88-96.
[2]郗润平,周涛,陆惠玲,等.变背景下红外目标的跟踪[J].中国体视学与图像分析,2009(2):116-119.XI Rui-ping,ZHOU Tao,LU Hui-ling,et al.Infrared target tracking research in changeable background[J].Chinese Journal of Stereology and Image Analysis,2009(2):116-119.
[3]高国旺,刘上乾,秦翰林,等.复杂背景下的红外目标自动跟踪算法[J].光电工程,2010(6):78-83.GAO Guo-wang,LIU Shang-qian,QIN Han-lin,et al.Autotracking algorithm of infrared target under complex background[J].Opto-Electronic Engineering,2010(6):78-83.
[4]孙群,赵颖,孟晓风,等.热源式红外目标运动模拟器测控系统设计[J].传感技术学报,2007(6):1267-1270.SUN Qun,ZHAO Yin,MENG Xiao-feng,et al.Design of test and control system for an infrared target simulator[J].Chinese Journal of Sensors and Actuators,2007(6):1267-1270.
[5]苏秀琴,梁金峰,陆陶,等.海天复杂背景下红外目标的检测跟踪算法[J].光子学报,2009(5):1309-1312.SU Xiu-qin,LIANG Jin-feng,LU Tao,et al.IR target detection&tracking algorithm based on sea-sky back ground[J].Acta Photonica Sinica,2009(5):1309-1312.
[6]张辉,赵保军,唐林波,等.基于自适应多特征整合的红外目标跟踪[J].光学学报,2010(5):1291-1296.ZHANG Hui,ZHAO Bao-jun,TANG Lin-bo,et al.Infrared object tracking based on adaptive multi-features integration[J].Acta Photonica Sinica,2010(5):1291-1296.
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
北京航空航天大学学报(2019年9期)2019-10-26
民用飞机设计与研究(2019年4期)2019-05-21
成都信息工程大学学报(2018年4期)2019-01-23
小学科学(2019年12期)2019-01-06
电子制作(2018年23期)2018-12-26
雷达学报(2017年3期)2018-01-19
西北工业大学学报(2015年3期)2015-12-14