基于Matlab/Simulink的交流异步电机矢量控制系统
2014-01-15 09:59张文哲
电子设计工程 2014年15期
张文哲
(1.上海理工大学 上海 200093;2.德国科堡应用科技大学 巴伐利亚州 科堡 96450)
随着科技的发展,工业生产中对电机控制系统的性能要求不断变高。因此,建立性能优越的交流异步电机控制系统的模型成为电机研究领域急需解决的一个关键问题。文中利用Matlab/Simulink的强大建模仿真功能,提出了一种电机的矢量控制方法以及建立了模型并进行仿真[1]。
1 交流异步电机数学模型的建立
1.1 矢量控制系统中的坐标变换
三相电流 iA、iB、iC和两相垂直的电流 iα、iβ通过异步电机的定子部分,这两种电流之间存在着矢量变换关系。在三相定子坐标系下,电机的定子电流iA、iB、iC可以经过3/2坐标变换等效成两相静止坐标系下的交流电流iα、iβ。然后通过转子的旋转变换(根据转子磁场定向原理),即等效成直流电流id、iq(同步旋转坐标系情况下)[2]。
变换矩阵(3/2变换)为:
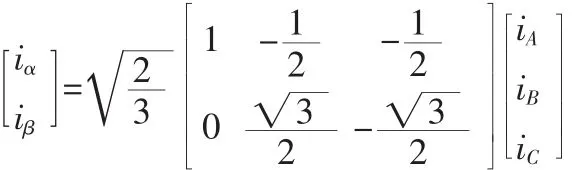
从α、β系(两相静止坐标系)变换到d、q系(两相旋转坐标系)的变换矩阵为如下公式:
1.2 交流异步电机的数学模型
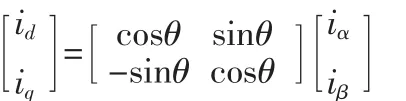
在矢量控制过程中交流异步电机的物理模型如图1所示。其中电机的定子三相绕组轴线A、B、C是固定在电机内部的,把A轴作为一个参考坐标轴,则转子绕组a、b、c随着转子进行旋转,θ为空间角位移变量[3]。
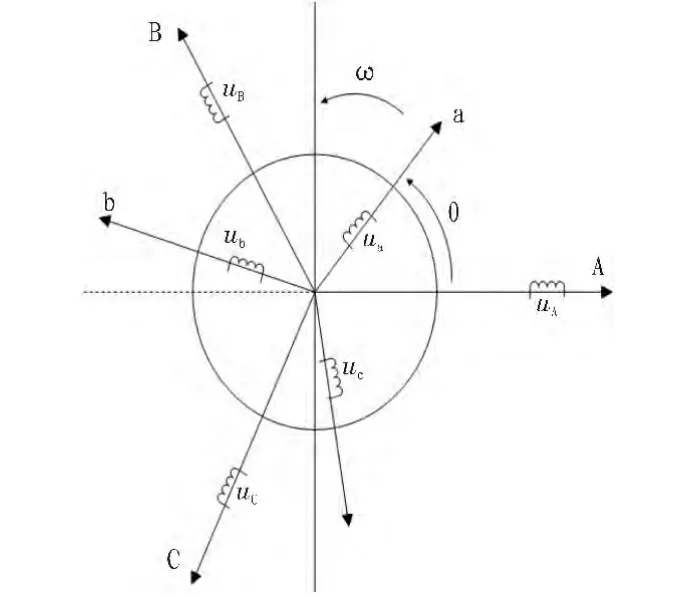
图1 交流异步电机物理模型Fig.1 Physical model of AC asynchronous motor
2 交流异步电机矢量控制原理
2.1 矢量控制的控制思路
在设计过程中模拟直流电机的控制手段,计算得到直流电机的控制量,然后经过对应的坐标反变换,那么利用这样的过程就能够简单的控制交流异步电机了。这样的过程是根据交流异步电机经相应的坐标变换可等效为直流电机的原理而来的。因此通过此类的坐标变换而实现的控制系统就称为矢量控制变换系统,亦或简称为矢量控制系统[4]。
2.2 矢量控制的坐标转换
三相静止坐标转化为两相静止坐标(3s/2s变换)公式为:

两相静止坐标转化为两相旋转坐标(即2s/2r变换)公式为:

2.3 矢量控制的原理及实现方法
图2为交流异步电机的变频矢量控制系统框图,这个系统是采用转差频率矢量控制方式的。首先计算出转矩的电流给定值,由磁通给定值计算出励磁电流给定值其中ψ2和ωs是由电动机的实际电流经对应的坐标变换得到,通过电流模型法计算出d、q轴的电流id、iq。对给定电流值、进行相应的坐标反变换,即可得到定子三相电流指定值iA,iB,iC。 最后,由 ACR 的输出去控制 IGBT,即:ACR 的输出信号为IGBT的控制信号。而ACR的输出是由检测得到的三相电流实际值跟给定电流值比较产生的偏差而决定的[5]。
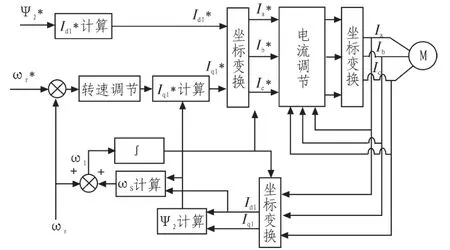
图2 主电路图Fig.2 Main circuit diagram
3 交流异步电机矢量控制系统的建模及仿真
3.1 系统主电路图
图3为电机矢量控制系统的电路主要部分。Constant speed为速度给定模块。设置原始角速度为120rad/s。Speed Controller是PI控制器,也可称作是速度控制器。它的输出转矩信号传给iqs*calculation模块。dq to abc conversion模块的主要功能是通过给定的定子d和q坐标电流分量,结合Teta calculation模块可计算出θ角,把定子dq两相电流坐标转化为abc三相电流坐标。ABC to abc conversion模块的作用是把定子dq坐标电流转化成定子abc坐标电流,再将此定子abc坐标电流输入ACR电流调节器,与电机实际的反馈电流产生一个比较,用比较的输出信号来控制IGBT的导通与关断,从而可以对电机转速形成控制。
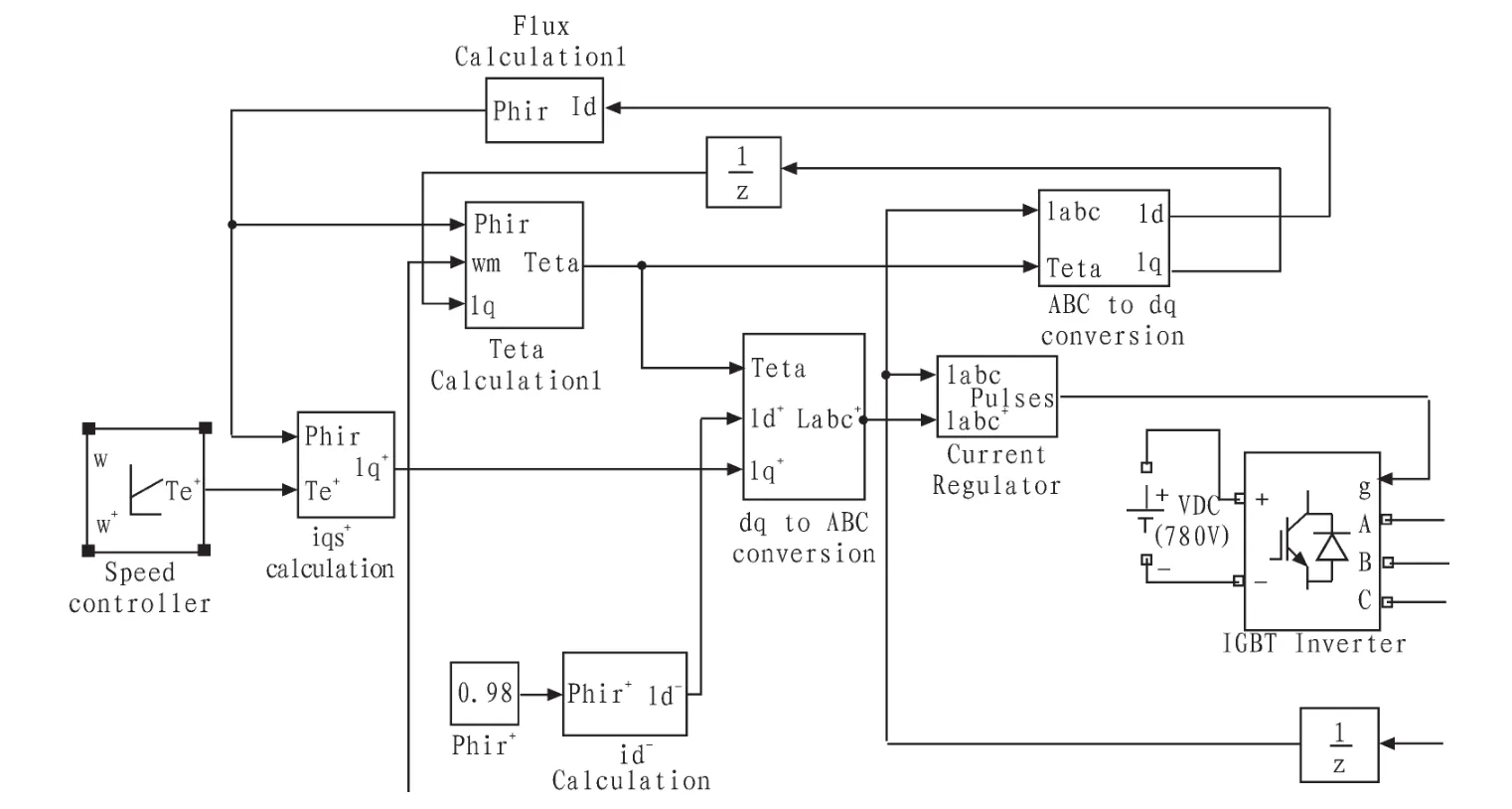
图3 电路主要部分Fig.3 Main part of circuit
3.2 Matlab仿真实验结果及分析
1)电机空载运行试验
从图4空载运行的曲线可以看电机刚启动的时候,定子电流可以达到450 A的极限值。电机恒转矩启动阶段,定子电流一般维持在100 A左右,恒转矩启动阶段的启动时间大致为0.7 s。在恒转矩运行段,转矩始终保持在最大值300N×M左右。
2)转速输出波形(转速为 100 r/min,P=1,I=10,负载为 0)
波形稳定值为99.8 r/min,5%的响应时间为9.04 s

图4 空载时的定子三相电流Fig.4 Three phase current of the stator when no-load

图5 转速设为100 r/min转速曲线Fig.5 Rotate curve when set 100 r/min
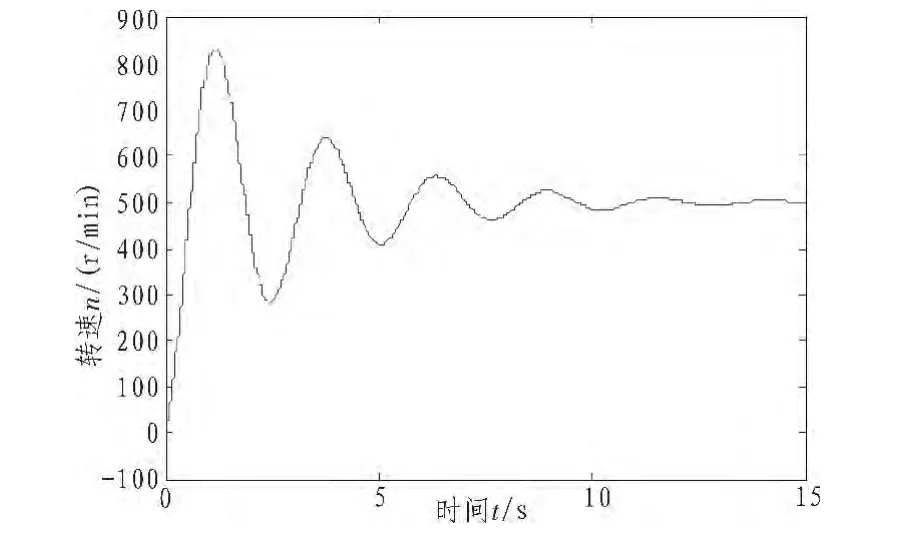
图6 转速设为500 r/min转速曲线Fig.6 Rotate curve when set 500 r/min

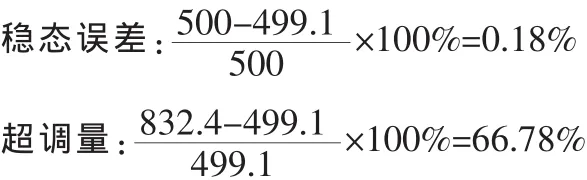
3)转速输出波形(转速为 500 r/min,P=1,I=10,负载为 0)
波形稳定值为499.1 r/min,5%的响应时间为8.03 s
4)转速输出波形(转速为 1 000 r/min,P=1,I=10,负载为 0)
波形稳定值为998.9 r/min,5%的响应时间为8.01 s
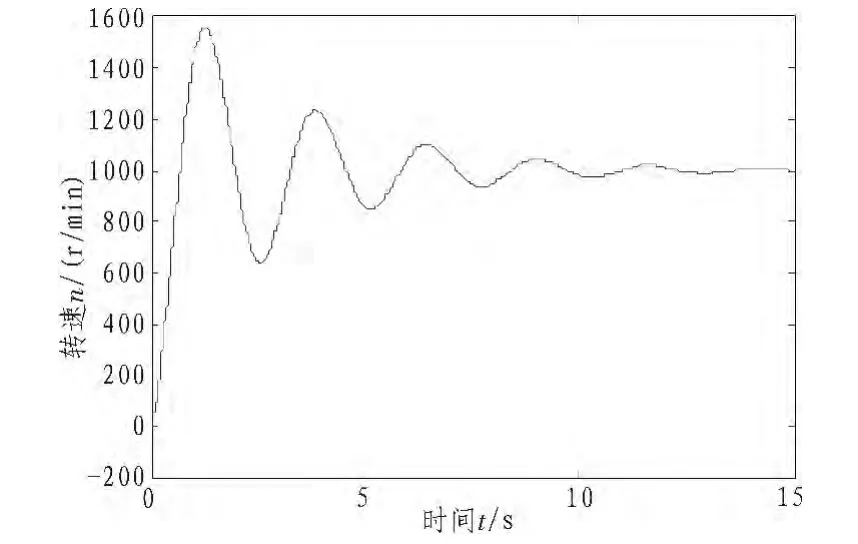
图7 转速设为1000r/min转速曲线Fig.7 Rotate curve when set 1000r/min
4 结束语
通过此次模型的设计以及仿真,可以看出MATLAB比较适合电机控制领域内的仿真及研究。Matlab/Simulink在研究某些问题的时候,操作起来十分方便,也极大的提高了效率。通过大量的仿真试验得到的仿真结果曲线,充分证明了在交流异步电机矢量变换模型的基础上来建立模型的正确性可靠性。采用SIMULINK库来对交流异步电机的调速系统进行仿真,不需要编程。具有简单、精确等优点。在研究电机调速系统的领域中具有重要的影响和意义。
[1]王成元,夏加宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2009.
[2]林琳,陈刚.异步电动机矢量模型的Matlab软件仿真及其应用[J].微特电机,2008(1):31-34.LIN Lin,CHEN Gang.Asynchronous motor vector model simulation of Matlab software and its application[J].Small&Special Electrical Machines,2008(1):31-34.
[3]张倩,张荣文.基于Simulink的异步电机矢量控制系统建模与仿真[J].机械工程与自动化,2008(5):3-7.ZHANG Qian,ZHANG Rong-wen.Modeling and simulation of induction motor vector control system based on simulink[J].Mechanical Engineering&Automation,2008(5):3-7.
[4]徐飞.基于MATLAB的异步电机矢量控制系统仿真[J].信息技术与信息化, 2008(6):70-72.XU Fei.Simulation of induction motor vector control system based on simulink[J].Information Technology and Information,2008(6):70-72.
[5]张兴华.基于Simulink/PSB的异步电机变频调系统建模与仿真[M].系统仿真学报,2005,17(9):2099-2103.ZHANG Xing-hua.Modeling and simulation for variablefrequency drives of asynchronous motors based Simulink/PSB[J].Journal of System Simulation,2005,17(9):2099-2103.
[6]周渊深.交直流调速系统是MATLAB仿真[M].北京:中国电力出版社,2004.
猜你喜欢
科技创新导报(2022年17期)2022-09-22
微电机(2022年1期)2022-03-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
测控技术(2018年2期)2018-12-09
电测与仪表(2014年21期)2014-04-04
电力工程技术(2014年1期)2014-03-20
组合机床与自动化加工技术(2014年10期)2014-03-01