四旋翼飞行器控制系统的设计与实现
2014-02-27 01:32易先军谢亚奇
武汉工程大学学报 2014年11期
易先军,周 敏,谢亚奇
武汉工程大学电气信息学院,湖北 武汉 430205
0 引 言
近年来,随着军用和民用市场的广阔应用需求以及四旋翼本身独特的性能,四旋翼飞行器已经成为航空学术研究中的热点问题[1].小型四旋翼飞行器具有4个螺旋桨,并且螺旋桨成十字交叉结构的旋翼式飞行模式,由4个独立的电机分别驱动.4个旋翼蝶形分布,分别以顺时针和逆时针两个方向旋转,对角线上的电机转动方向相同,相邻电机转动方向相反.通过调节4个电机的转速可实现俯仰、横滚、偏航等飞行动作,并有可悬停、机动性好、方向控制灵活等优点.
四旋翼飞行器控制系统一般采用内外环控制,内环控制为姿态控制,外环控制为位置控制[2]. 四旋翼飞行器的比例积分微分(Proportional Integral Derivative,以下简称:PID)控制模型如图1所示,对横滚角(ROLL)和俯仰角(PITCH)的偏差单独进行PID后,再结合偏航角(YAW)使PID控制系统达到稳定.

图1 四旋翼飞行器的PID控制模型
1 四旋翼飞行器飞行原理
1.1 坐标系的建立
建立机体坐标系b和地面坐标系g,分析飞行器的运动过程,如图2所示.

图2 机体坐标系与地面坐标系
地面坐标系为导航坐标系.在地面上选一点Og,使Xg轴在水平面内并指向右方,Zg轴垂直地面并指向上方,Yg轴在水平面内垂直于Xg,其指向按右手定则确定.
机体坐标系建立在飞行器机体上.飞行器重心位置选为原点Ob,Ob-XbYbZb在四旋翼飞行器对称平面内,Xb轴与2、4号电机的连线平衡,平行于Xg轴且指向右方;Yb轴与1、3号电机的连线平衡,平行于Yg轴且指向前方;Zb轴与Zg轴平行且指向上方[3].
机体坐标系绕3个轴旋转与地面坐标系所成的夹角分别称为俯仰角、横滚角、偏航角.俯仰角是飞行器在Xb-Zb平面进行绕Yb轴运动时Xb轴与Xg-Yg平面的夹角;横滚角是飞行器在Yb-Zb平面进行绕Xb轴运动时Yb轴与Xg-Yg平面的夹角;偏航角是飞行器在Xb-Yb平面进行绕Zb轴运动时Xb轴在Xg-Yg平面中的投影与Xg轴的夹角[4].
1.2 飞行原理分析
四旋翼飞行原理图如图3所示,设定1、3号电机逆时针旋转,2、4号电机顺时针旋转.当飞行器2、4号电机转速相同,1号电机的转速大于3号电机的转速时如图3(a)所示,飞行器做横滚运动;当飞行器的1、3号电机转速相同,4号电机的转速大于2号电机的转速时如图3(b)所示,飞行器做俯仰运动;当飞行器1、3号电机的转速大于2、4号电机的转速时如图3(c)所示,飞行器做偏航运动;当飞行器4个电机转速相同,总的升力大于或等于机体本身重力时如图3(d)所示,飞行器做垂直运动.

图3 四旋翼飞行原理图
2 飞行器控制系统的设计
飞行器控制系统的结构框图和实物图如图4和图5所示.

图4 系统结构框图

图5 飞行器实物图
控制系统由MPU6050模块、MSP430f149处理器、电源模块以及电机和电调5部分组成.MPU6050是数据分析滤波加速度传感器,整合了三轴陀螺仪和三轴加速度计,自带的数字运动处理(DMP)引擎可减少复杂的融合演算数据,可快速、方便的对飞行器所在位置进行姿态解算;MSP430f149单片机是美国德州仪器(TI)公司推向市场的一种16位超低功耗的混合信号处理器(Mixed Signal Pocessor),采用了精简指令集(RISC)结构,具有丰富的寻址方式(7 种源操作数寻址、4 种目的操作数寻址)、简洁的 27 条内核指令以及大量的模拟指令,大量的寄存器以及片内数据存储器都可参加多种运算,还有高效的查表处理指令,保证控制系统所有的软件程序顺利高效率的完成;电调是空模无刷马达电子调速器,控制信号是一组PWM方波信号,PWM波的周期设为20 ms.PWM波占空比越大,电机的转速越大.在MSP430f149的处理下,姿态角由MPU6050的DMP解算后通过EEPROM模拟IIC通信送入PID控制器中,然后分别对横滚角、俯仰角、偏航角的偏差进行比例、微分、积分处理,结合电机的基本油门加到PWM波占空比上控制电机的转速,从而实现飞行器姿态的有效控制.
3 姿态角的PID控制
3.1 飞行器控制系统结构
飞行器机架采用“十”字形结构.通过对十字结构的X、Y轴以及垂直方向的Z轴控制保持平衡.对X、Y、Z轴的姿态角分别进行PID控制,系统结构图如图6所示.

图6 PID控制原理图
图6中,横滚角(ROLL)为X轴的角度,产生PWM1、PWM3脉冲控制1、3号电机飞行平稳;俯仰角(PITCH)为Y轴的角度,产生PWM2、PWM4脉冲控制2、4号电机飞行平稳;偏航角(YAW)为Z轴的角度,用来保持飞行器的航向.ROLL_Exp、PITCH_Exp、YAW_Exp为MPU6050静止平稳时读出的横滚角、俯仰角、偏航角的度数,为期望值,设定为0.ROLL、PITCH、YAW是横滚角、俯仰角和偏航角,为实时角度.

3.2 PID控制的实现
在四旋翼飞行器悬停状态下进行实验,经过多次调试确定的PID参数取值如表1所示.

表1 PID参数取值
在飞行器悬停飞行时,每50 ms测一次姿态角,连续取2 000个数据进行分析.
横滚角阶跃到4°时,PID控制器测试结果如图7所示.
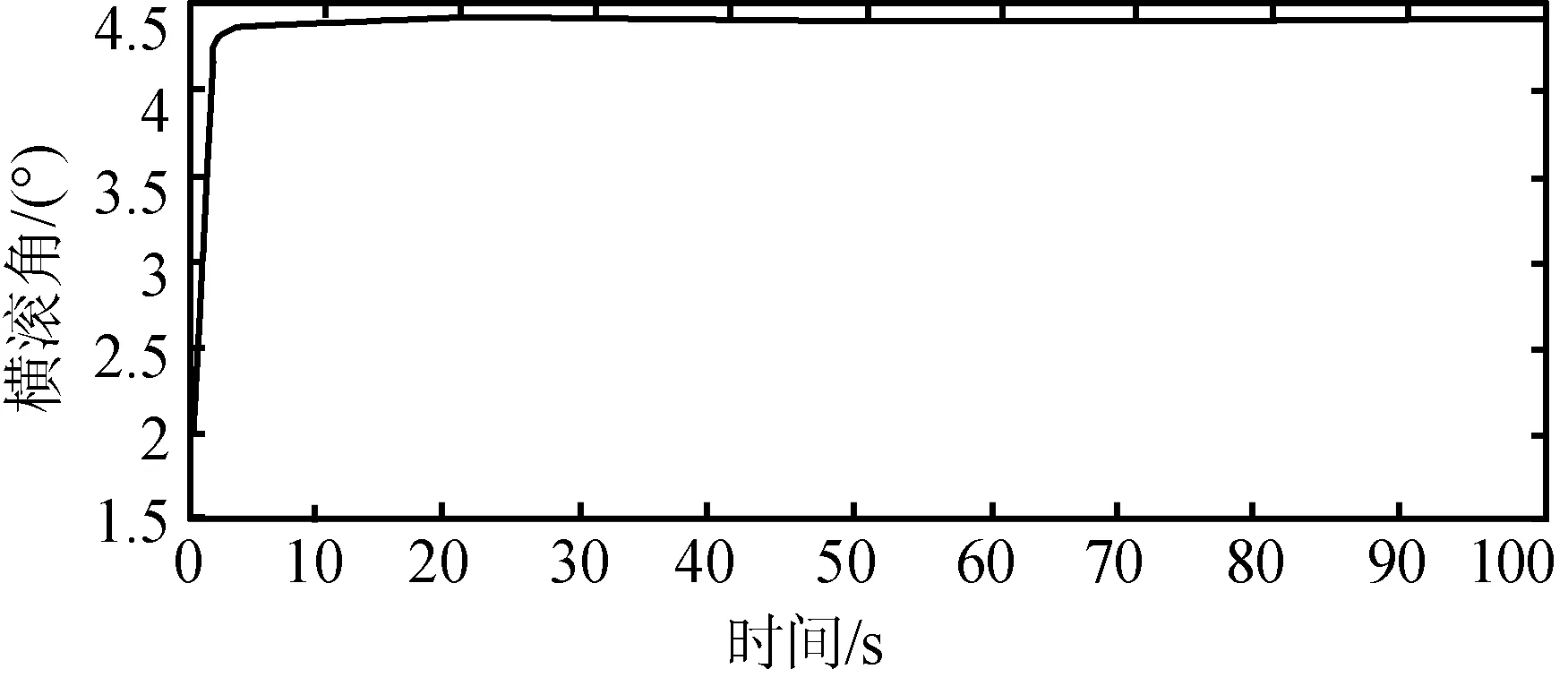
图7 横滚角PID控制后的结果
俯仰角阶跃到4°时,PID控制器测试结果如图8所示.

图8 俯仰角PID控制后的结果
偏航角阶跃到13°时,PID控制器的测试结果如图9所示.
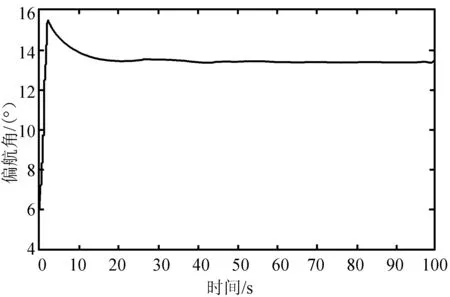
图9 偏航角PID控制后的结果
实验结果显示,横滚角、俯仰角和偏航角的误差均小于1°,在小角度控制时能很好的消除稳态误差,且系统超调量较小,响应速度快,验证了PID控制的有效性.
4 结 语
笔者以小型四旋翼无人机为研究对象,分析了四旋翼飞行器的飞行原理,设计了一种基于MSP430f149处理器的飞行控制系统,系统采用PID控制算法,提升了控制系统的鲁棒性.实验结果表明,所设计的基于PID算法的控制系统结构简单,控制可靠,能保持快速响应无静差和较小超调量等优良性能.
致 谢
实验室刘健老师在设计与调试过程中提供了帮助并提出建议,武汉工程大学电气信息学院提供了经费资助,在此一并致谢!
[1] 李俊,李运堂. 四旋翼飞行器的动力学建模及PID控制[J].辽宁工程技术大学学报:自然科学版,2012,31(1):114-117.
LI Jun, LI Yun-tang. Modeling and PID control for a quadrotor[J]. Journal of Liaoning Technical University:Natural Science Edition, 2012,31(1):114-117.(in Chinese)
[2] 宿敬亚,攀鹏辉,蔡开元.四旋翼飞行器的非线性PID姿态控制[J].北京航空航天大学学报,2011,37(9):1054-1058.
SU Jing-ya, PANG Peng-hui, CAI Kai-yuan. Attitude control of quadrotor aircraft via nonlinear PID[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011,37(9):1054-1058. (in Chinese)
[3] 江杰,岂伟楠. 四旋翼飞行器建模与PID控制器设计[J].电子设计工程,2013,23(21):147-150.
JIANG Jie, QI Wei-nan. Modeling and PID control for a quadrotor[J]. Electronic Design Engineering, 2013, 23(21):147-150. (in Chinese)
[4] 刘杰. 四轴飞行器的研究与设计[D].南京:南京邮电大学,2013.
LIU Jie. Four-axis aircraft research and design[D]. Nanjing:Nanjing University of Posts and Telecommunications, 2013. (in Chinese).
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
电子制作(2018年2期)2018-04-18
传媒评论(2017年8期)2017-11-08
北京航空航天大学学报(2016年8期)2016-11-16
小朋友·快乐手工(2015年5期)2015-06-06