
一种改进的模型驱动PID的应用研究
2014-03-25 04:39
仪器仪表用户 2014年3期
(华北电力大学 自动化系,河北 保定 071000)
一种改进的模型驱动PID的应用研究
乔静兵,何同祥
(华北电力大学 自动化系,河北 保定 071000)
对模型驱动PID(简称MD-PID)控制算法进行介绍,提出了一种改进的模型驱动PID (简称A-MD-PID) 控制算法,并应用于二阶惯性加纯迟延对象,用MATLAB进行仿真研究。结果表明,本文采用的改进模型驱动PID,能有效地克服被控对象的惯性和迟延,提高系统的控制品质。
模型驱动PID;改进算法;仿真研究
0 引言
PID控制[1]是应用比例、积分、微分环节对偏差进行运算的一种综合控制。PID控制器[2]具有原理简单、使用方便、鲁棒性强、其控制品质对过程变化灵敏度低、控制器参数整定比较容易、无静差调节等特点,一直是工业过程控制领域的主导控制器。但是在热工控制过程中,大型单元机组大多都是大惯性、大迟延的特性,应用简单的PID控制器控制很难达到理想的控制效果,而且参数整定也比较困难。
随着计算机的飞速发展和控制理论的广泛应用,已有的PID控制算法已经满足不了当今社会的发展,人们开始对先进PID控制算法地研究。基于内模控制[3]的各种控制算法由于设计原理简单,应用范围广,控制性能优越,而引起过程控制界的关注。模型驱动PID控制是2002年由Shibaura、Tokyo等人提出来的一种基于内模控制的较新型控制算法[4]。它将等效被控对象模型近似为一阶惯性加纯迟延。但在热工过程控制系统中,这种一阶近似模型与实际被控对象的动态特性差距较大,不易取得好的控制效果,所以没有得到普遍应用。本文在原有模型驱动PID算法的基础上,将等效被控对象模型近似为二阶惯性加纯迟延,推导出新的控制算法公式。文中通过MATLAB仿真对A-MDPID和原MD-PID进行比较,结果表明,A-MD-PID获得了良好的控制品质。
1 模型驱动PID控制系统及改进
1.1模型驱动PID控制基本算法
模型驱动PID控制[4],通过增加一个PD反馈补偿环节,将等效被控对象近似为一阶惯性加纯迟延,然后以此等效被控对象作为参考模型,应用内模控制的设计方法来设计控制器。如图1所示。

图1 MD-PID控制系统原理图Fig.1 MD - The principle diagram of the PID control system
根据图1,MD-PID控制系统基本算法可用下式来描述:
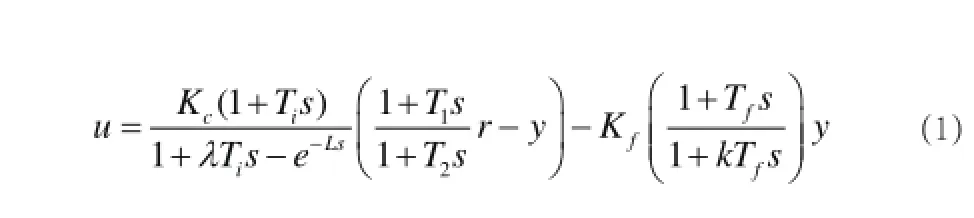
具体算法[4]如下:
通过麦克劳林展开公式可以将被控对象传递函数用下式展开:

PD反馈补偿器为:

由式(2)、(3)得:

F(s)通过下式设计:


等效被控对象模型为:

由式(5)~(7)得等效被控对象模型参数:

1.2模型驱动PID的改进
对模型驱动PID做如下两点改进:
1)将等效被控对象模型由一阶惯性加纯迟延改进为二阶惯性加纯迟延。
2)对计算过程进行改进,推导出新的计算公式:原算法是由被控对象模型求取PD反馈参数,然后再求等效被控对象模型;改进算法为根据对等效被控对象模型的期望,来指定等效被控对象模型,然后再计算PD反馈中的参数。如图2所示。
根据图2,A-MD-PID控制系统可用下式来描述:

通过麦克劳林展开公式将被控对象传递函数展开为:

由式(12)、(13)得:

期望的等效被控对象模型为:

通过麦克劳林展开公式将式(15)展开得:

指定T0,l0,由式(17)得K0
最后得出PD反馈补偿器F(s)中参数:

图2中定值滤波器是一个超前滞后环节,用于对设定值做处理,主要在设定值变化时对设定值做调理。
2 MATLAB仿真
为了检验A-MD-PID算法的控制效果,本文采用MATLAB中的SIMULINK工具,对A-MD-PID和原MD-PID控制算法进行仿真研究。
选取被控对象[5]传递函数为:

等效被控对象模型为:

PD反馈补偿器为(k=0.1):

采用A-MD-PID控制、原MD-PID控制和PID控制,在定值阶跃扰动下的系统输出响应曲线如图3所示。仿真结果表明,A-MD-PID控制效果较好。

图3 模型匹配时阶跃响应曲线图Fig.3 Model matching step response curve
大型单元机组在工业现场总是存在各种各样的噪声和扰动,而且用模型代替实际被控对象总会有误差,因而控制系统需要有一定的鲁棒性。凭经验所知,一般在工程中,当K增大、T减小、l增大时模型失配的情况是最难控制的。假设被控对象的K、l各增加10%,T减小5%,即K=3.96,T=142.5,l=71.5s。在定值阶跃扰动下的系统输出响应曲线如图4所示。仿真结果表明,A-MD-PID算法具有良好的鲁棒性。
3 结束语

图4 模型失配时阶跃响应曲线图Fig.4 Step response curves of model mismatch
本文在由Shibaura、Tokyo等人提出来的模型驱动PID控制的基础上,提出了改进模型驱动PID控制算法。通过MATLAB仿真验证了改进模型驱动PID控制的优越性。相比模型驱动PID基本算法,改进模型驱动PID不仅能有效地克服被控对象的大惯性和大迟延,抑制了超调量,而且兼顾了系统的快速性,从而提高了系统的控制品质。文中提出的改进模型驱动PID控制算法,经过简单地转换、组合,可以采用DCS常规功能块组态实现,也可以通过DCS用户自定义模块编程实现,是一种有推广价值的新型控制算法。
[1]杨智,朱海峰,黄以华. PID控制器设计与参数整定综述 [J].化工自动化及仪表, 2005 , 32( 5 ): 1- 7.
[2]韩璞,智能控制理论及应用[M].北京:中国电力出版社,2012:141-144.
[3]靳其兵,黄文兵. 两种 IMC-PID整定方法的比较[J]化工自动化及仪表, 2010 , 37( 4): 10-12.
[4]Toshiba-Cho, Fuchu-shi, Toky. A Model-Driven PID Control System and its Case Studies [J].2002:18-20.
[5]张艳娟. 超临界锅炉再热汽温控制系统研究[D]. 保定:华北电力大学, 2008.
The Application of an Improved Model Driven PID
Qiao Jingbing, He Tongxiang
(Automation Department, North China Electric Power University, Baoding 071000,China)
A brief introduction to model driven PID (MD-PID) control algorithm. An improved model driven PID (A-MDPID) control algorithm is put forward, and applied to the control system with two order lag and delay process, and studied by MATLAB. The simulation results show that A-MD-PID can effectively overcome the lag and delay of controlled object, so improve the performance of control system.
model-driven PID; algorithm improvement; simulation research
TP273+.3
A
Doi:10.3969/j.issn.1671-1041.2014.03.025
2014-03-20
乔静兵,女,硕士研究生,从事智能控制、协调控制系统优化等研究。
猜你喜欢
环球时报(2020-08-11)2020-08-11
纺织科学研究(2020年1期)2020-05-21
法大研究生(2020年2期)2020-01-19
大经贸(2019年10期)2019-12-09
机电工程技术(2018年10期)2018-12-06
分忧(2018年9期)2018-09-08
制造技术与机床(2017年6期)2018-01-19
舰船科学技术(2015年8期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
