列车测速定位误差的仿真研究
2014-06-21 10:49张小林
城市轨道交通研究 2014年3期
赵 磊 张小林
(上海富欣智能交通控制有限公司,201203,上海∥第一作者,工程师)
基于通信的列车控制(CBTC)系统是一种连续的自动列车控制系统[1-2]。它利用高精度的列车定位,采取双向连续、大容量的车地数据通信,依靠车载、地面的安全功能处理器来加以实现,多用于城市轨道交通。高精度的列车定位技术是CBTC系统的关键技术之一,列车速度和位置信息是移动闭塞、列车运行控制的重要参数,精确的列车速度和位置信息能有效地提高行车效率和安全性。列车测速定位功能是车载设备(OBCU)模块的重要功能。该功能的准确实现直接影响列车运行的安全性。
1 列车测速定位系统
随着城市轨道交通的快速发展,列车测速定位技术[3-5]已经成为列车运行自动控制系统的关键技术之一。本文的列车测速定位系统通过不断测量列车的运行速度,采用对列车的即时速度进行积分的方法,得到列车的走行距离,辅助其他定位方法(如定位信标)来获取列车的位置信息[6-7]。该列车测速定位系统中采用基于轮轴速度传感器的技术来进行列车速度测量。该测速定位技术的发展已经相对成熟,能提供高精度、数字化的速度和距离信息,因此近年来得到了广泛应用。但是,由于以车轮转动作为采集对象,轮径大小直接影响列车速度和走行距离的误差;且列车运行过程中的空转、滑行现象也会对测量结果产生较大的误差。为了克服这些因素的影响,列车测速定位系统还要完成轮径校正和空转、滑行现象判断功能。
1.1 列车测速功能
轮轴脉冲速度传感器是通过测量车轮的转速脉冲来计算列车的速度。设测速轮对转一圈速度传感器输出n个脉冲,列车车轮的直径为R,这样只需测量出脉冲的周期T,就可以计算列车车轮的轮周线速度vraw:

如果车轮与钢轨接触面上的点与钢轨之间没有相对运动(即没有发生空转、滑行现象),那么这个轮周线速度就是列车沿轨道方向的线速度(即列车速度)。列车测速定位系统如图1所示。
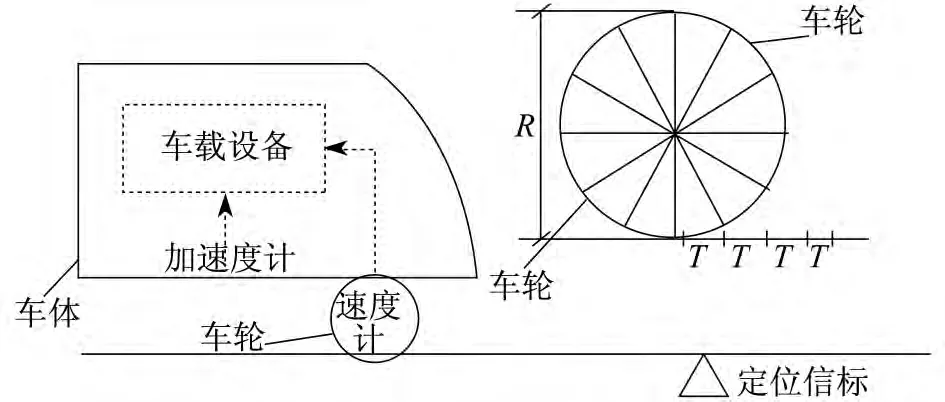
图1 列车测速定位系统示意图
1.2 列车定位功能
列车的测速和定位是紧密联系的,通常的列车定位系统基本上都包括了列车的测速和定位两项功能,所以一般称之为列车测速定位系统。列车速度v和列车行走距离S的关系如下:

式中:
t——时间;
S0——起始点位置。
所以,确定起始点位置信息后,获得速度信息就可以间接地获得位置信息。
本文的定位功能采用脉冲计数的方法,对在一个车载设备处理周期(t)内的脉冲数进行累加,得到车载设备处理周期内的总脉冲数,最终得到本处理周期内的列车行走距离。式(2)中的S0(绝对公里标)可以通过定位信标,传送给车载设备,如图2所示。
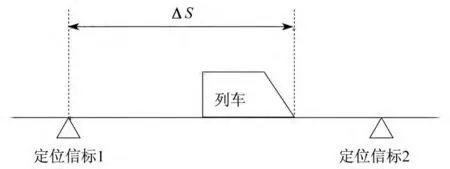
图2 列车定位功能示意图
列车走行距离的计算公式如下:
式中:
Nk——第k个车载设备处理周期内的脉冲数目;
S(k)——第k个车载设备处理周期内的列车走行距离;
ΔS——经过上一个定位信标后的列车走行距离。
列车的实际位置则可以通过上一个定位信标的绝对位置ΔS来确定。
1.3 轮径校正功能
由于车轮磨损等原因,列车轮径在使用过程中是变化的。用同一轮径值计算列车位置会引入误差,故要求在列车运营过程中对轮径值进行校正。由于列车在通过一定距离时,无论轮径是否存在误差,其脉冲计数值是一定的,该值不会由于轮径误差而改变(如图3所示)。
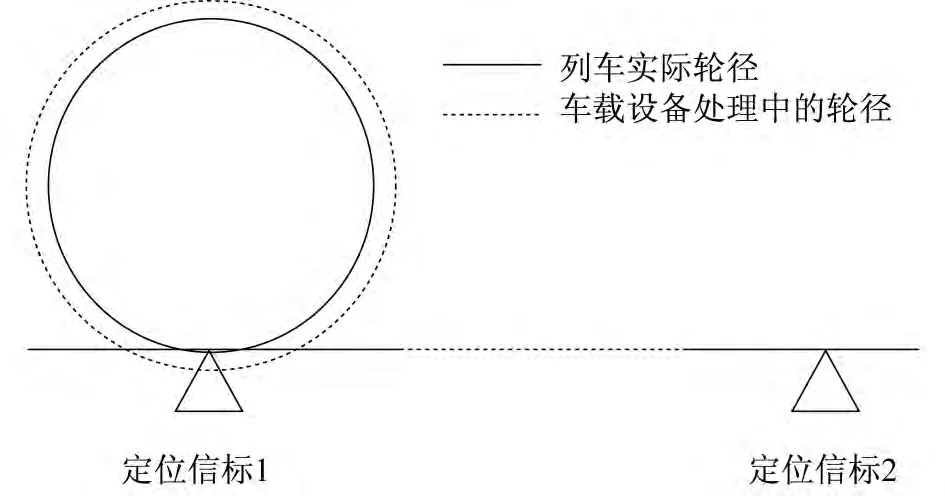
图3 轮径校正功能示意图
轮径校正功能的主要原理是通过车载设备计算得到的两个定位信标间距离S1和线路数据中两个定位信标的实际间距SB的比较,最终得到轮径校正参数φ。

式中:
RC——车载设备处理中的当前列车轮径值;
RA——列车轮径实际值。
1.4 列车空转、滑行现象判断功能
列车在运行过程中,由于受轮轨黏着系数、列车瞬时加速度的影响,车轮会发生空转、滑行现象。发生该现象的行为表现为列车的计算车轮速度vw与列车实际速度va偏差过大。当vw>va时,列车车轮发生空转现象;当vw<va时,列车发生滑行现象。
列车车轮空转现象主要产生在列车起动加速阶段,由于列车牵引力过大,车轮会发生空转现象。当空转发生时,列车计算得到的位置值Sc超越列车实际位置值Sa,设位置误差为Se,则有

对于后续列车而言,其错误地认为前车距离较远,行车许可(MA)已延伸到位置Sc。由于Se的存在,后续列车冒进,可能导致撞车事件的发生。
列车车轮滑行现象主要发生在列车制动阶段,由于列车制动力过大,使列车车轮与轨道之间产生相对运动,即发生滑行现象。当滑行发生时,列车计算得到的位置值Sc落后于列车实际位置值Sa。则有

由于当前列车错误判断自身位置离前行列车较远,当列车提速行驶时就可能导致撞车事件的发生。
综上所述,当列车车轮发生空转、滑行现象时,会影响列车运行的安全性。为保证列车安全运行,车载设备要求具备对列车车轮空转、滑行现象的判断功能。
列车车轮空转、滑行现象的判断原理是利用车载设备两个连续处理周期内,速度传感器采集的车轮速度和加速度传感器采集的列车加速度之间的相互比较来分析是否发生了车轮空转或滑行。由于加速度传感器安装在车辆上,故其加速度值是车辆真实的加速度值。
有两种方法可进行判断:速度比较和加速度比较。当速度或加速度差值超过一定阈值时,则判定发生空转、滑行现象。该阈值由车辆最大牵引力或最大制动力引起的加速度值来决定。
1)速度比较法:

式中:
vc(k)——通过加速度公式计算得到的第k个周期的列车计算速度;
a(k)——第k个周期传感器采集的列车加速度;
v(k-1)——第k-1个周期传感器采集的速度值;
v(k)——第k个周期传感器采集的列车速度;
vs——判断列车车轮是否发生空转、滑行现象的速度阈值。
当计算得到的列车速度与速度传感器的速度值的差值大于该阈值时,可判定列车车轮发生了空转、滑行现象。
2)加速度比较法:
式中:
ac(k)——通过加速度公式计算得到的第k个周期的列车计算加速度;
v(k)——第k个周期传感器采集的列车速度;
v(k-1)——第k-1个周期传感器采集的速度值;
a(k)——第k个周期传感器采集的列车加速度;
as——判断列车车轮是否发生空转、滑行现象的加速度阈值。
当计算得到的列车加速度与加速度传感器的加速度的差值大于该阈值时,可判定列车车轮发生空转、滑行现象。
2 速度误差
根据速度测量原理和车轮的轮周线速度公式,速度误差主要有两个来源:轮径误差和脉冲宽度的测量误差。倘若考虑列车车轮空转、滑行现象的影响,还要引入空转、滑行带来的速度误差。综合上面所有因素,最终得到列车速度误差参数。
2.1 轮径误差
随着车辆运营时间的推移,车轮会磨损。如果轮径按照出厂参数来设定,势必会带来误差。且列车运营中的牵引和制动会加速车辆的磨损。实际应用中,无法去估算车轮的磨损情况,但轮径误差始终存在,并对速度测量产生不利影响。该误差是一个累积的过程,随着时间的推移,车轮误差引起的列车速度误差会越来越大,严重地影响了列车测速定位功能,最终影响列车的安全运营。
为了消除该影响,车载设备实现了轮径校正功能。其在一定距离(定位信标间距)内实现一次完整的轮径校正功能,使轮径误差可以忽略不计。
2.2 脉冲宽度测量误差
脉冲宽度测量采用一串已知周期的高频脉冲,在低频速度传感器脉冲的使能下进行计数处理。计数和乘以高频脉冲周期,可得到低频速度传感器脉冲宽度。由于无法保证高频脉冲频率是低频速度传感器脉冲频率的整倍数,且由于触发同步等影响,势必会产生高频脉冲的计数误差,产生了速度传感器脉冲宽度误差。由于车载设备处理器数字精度的影响,还会引入一些数字处理误差。该误差同样会对列车速度计算结果产生不利的影响。
2.3 列车空转、滑行现象产生的误差
在车载设备不考虑列车车轮空转、滑行影响时,没有被发现的空转、滑行现象会对列车速度产生误差。该误差与当前列车速度有关,列车速度越大,发生空转、滑行现象后的误差就越大。
2.4 其他误差
在轮径校正过程中,使用两个相邻的定位信标作为标准距离与车载设备计算出来的走行距离进行比较,得出轮径校正系数。在这个过程中,假定了两个相邻定位信标的间距是真实值。然而,在实际工程和安装调试过程中发现,定位信标的实际安装位置会有偏差。由于该偏差,轮径校正系数产生了新的误差,即由于定位信标安装误差产生的测速误差。
另外,加速度传感器的一系列误差源也应该考虑在列车测速误差中。
3 位置误差
根据列车定位原理和方法,列车位置与定位信标绝对位置和列车走行距离有关。所以,定位信标的安装误差直接影响列车位置误差。由于列车走行距离是在两个相邻定位信标间的距离累加结果,分段走行距离的误差累积直接影响列车位置误差,且当走行距离越大时,列车位置误差越大。根据走行距离计算公式,分段走行距离误差则是速度误差和空转、滑行现象误差引起的。造成列车位置误差的各因素关系如图4所示。
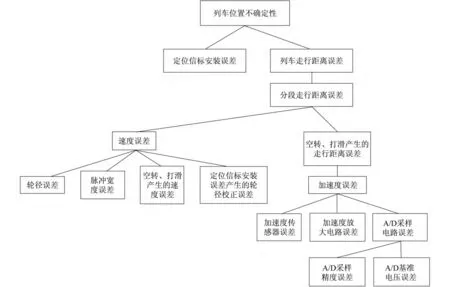
图4 造成列车位置误差的因素关系图
现对图4中的加速度误差进行说明。
加速度使用加速度传感器,经过滤波放大电路生成电压,进入A/D采样电路,最后经过车载设备处理生成加速度值。在这个过程中,由于加速度传感器自身误差、滤波放大电路误差、A/D采样精度误差、A/D基准电压误差和处理器自身数值误差等因素均会对加速度值产生影响,进而对列车位置误差产生影响。
4 列车测速定位误差仿真计算
为了对列车测速定位误差进行仿真研究,编写了仿真模拟程序。该仿真程序主要完成列车在不同运营条件下,列车测速定位误差的数值计算。同时,列车在不同速度、加速度和走行距离条件下,绘制了列车测速定位误差变化曲线。软件界面如图5所示。
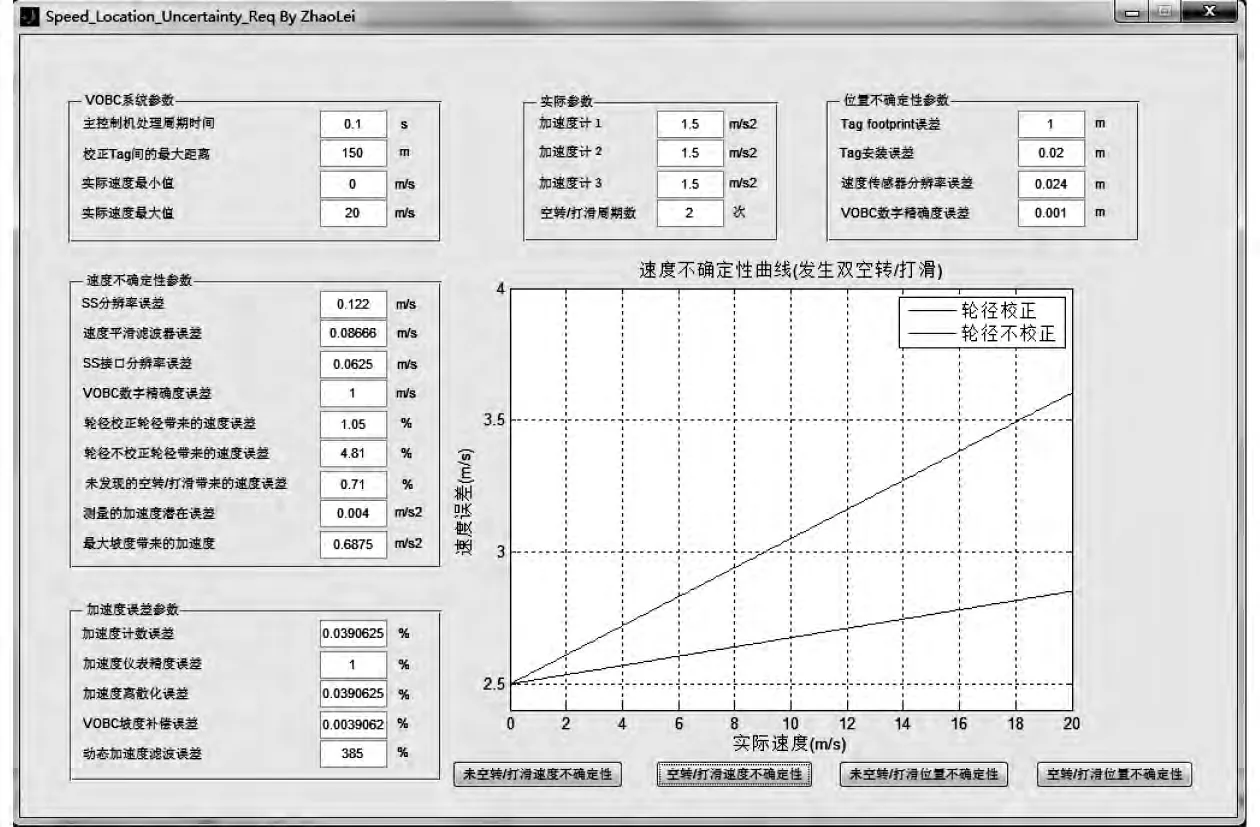
图5 列车测速定位误差仿真系统软件界面
利用该仿真系统对列车在轮径校正和不校正条件下的列车测速定位误差进行研究。同时,考虑了列车车轮发生空转、滑行时对列车测速定位误差的影响。通过仿真,得出了列车测速定位误差变化曲线。仿真的主要参数如表1所示,采用上海轨道交通7号线的具体数据,车辆是庞巴迪A型车,速度传感器是SKF公司的轮轴脉冲传感器,加速度传感器是Jewell公司的线性加速度传感器。
输入表1参数,即可以通过列车测速定位误差仿真程序进行计算,得出相应的列车测速定位误差变化曲线。
4.1 未考虑空转、滑行的列车速度误差
如图6所示,当列车实际速度越大时,速度误差越大。在列车速度为最大(20m/s)时进行轮径校正和不进行轮径校正条件下,速度误差分别为1.623m/s和2.375m/s。表2给出了列车实际速度与该速度下速度误差所占比例。从表2可以看出,随着列车速度提高,速度误差所占的比例越来越小。
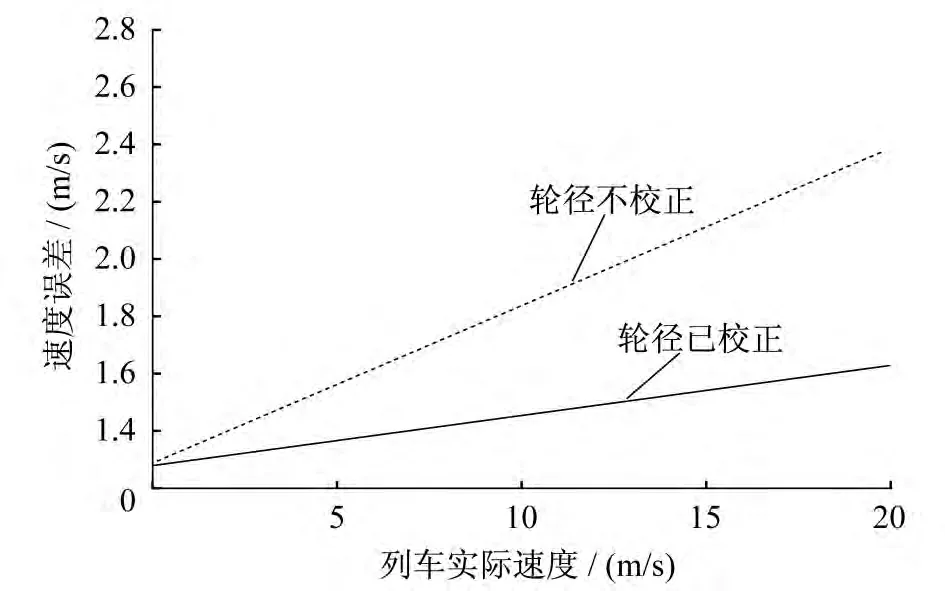
图6 未考虑空转、滑行的列车速度误差曲线
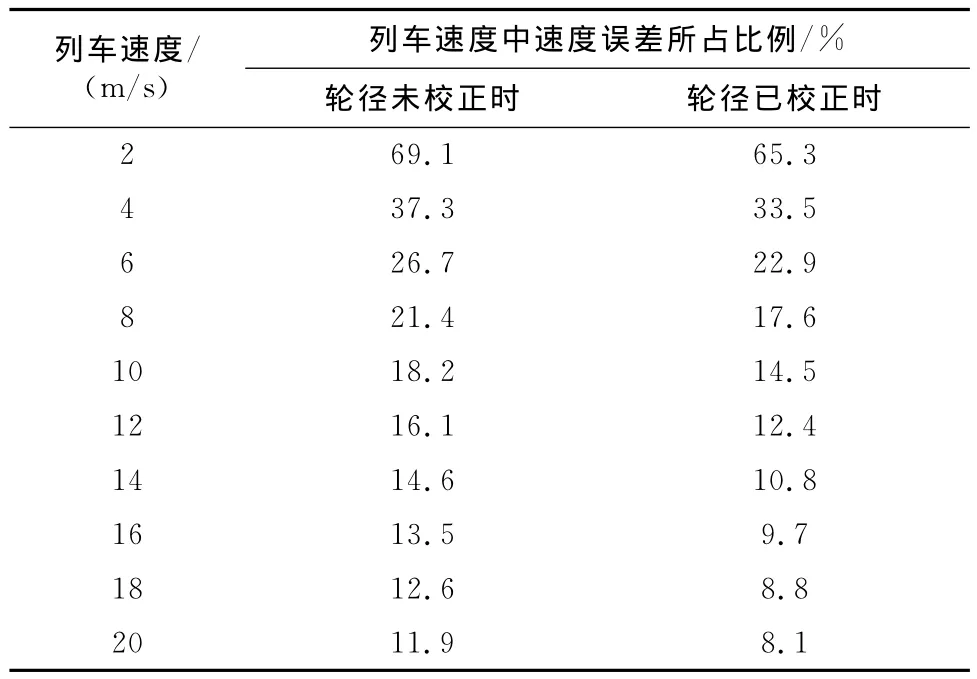
表2 列车速度中速度误差所占比例表(未考虑空转、滑行)
从表2可以看出,轮径校正后的速度误差有所改善,证明在实际工程应用中有必要实现轮径校正功能。
4.2 考虑空转、滑行的列车速度误差
如图7所示,列车实际速度越大,则速度误差越大。在列车速度为最大值(20m/s)时,进行轮径校正和不进行轮径校正条件下,速度误差分别为3.622m/s和4.374m/s。表3给出列车实际速度与该速度下速度误差所占的比例。从表3中可以看出,随着列车速度提高,列车速度误差所占的比例越来越小。
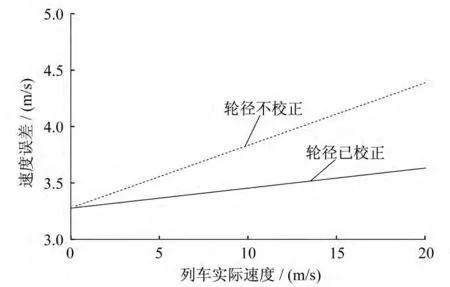
图7 考虑空转、滑行的列车速度误差曲线
从表3可以看出,考虑空转、滑行现象后,速度误差明显增大,证明空转、滑行应该考虑在实际应用中。同样,轮径校正后速度误差有所改善,证明在实际工程应用中有必要实现轮径校正功能。
4.3 未考虑空转、滑行的列车位置误差
如图8所示,当列车走行距离越大,则位置误差越大。在列车走行距离为150m时,进行轮径校正和不进行轮径校正条件下,位置误差分别为3.685 m和9.325m。表4给出了列车实际走行距离与该位置下位置误差在列车走行距离中所占的比例。从表4中可以看出,随着列车走行距离的增加,位置误差所占的比例越来越小。
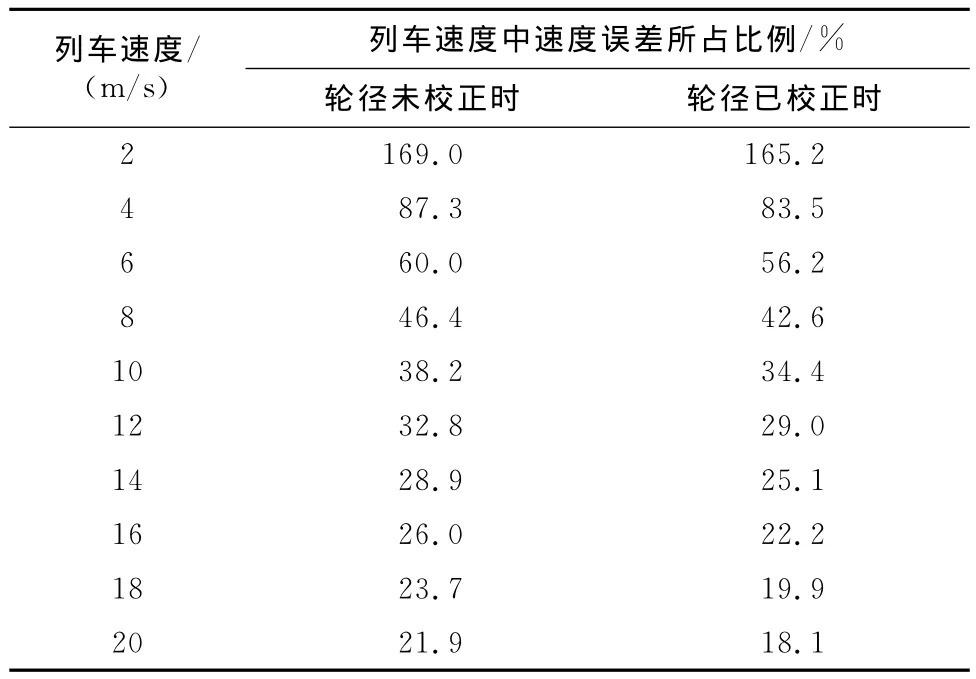
表3 列车速度中速度误差所占比例表(考虑空转、滑行)
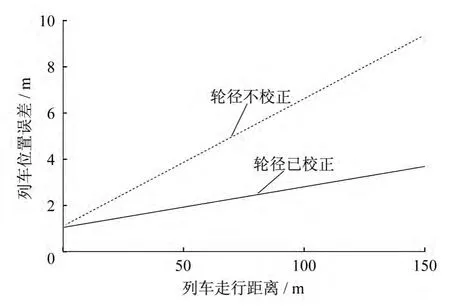
图8 未考虑空转、滑行的列车位置误差曲线

表4 列车位置误差在走行距离中所占比例表(未考虑空转、滑行)
从表4可以看出,轮径校正后的位置误差有所改善,证明在实际工程应用中有必要实现轮径校正功能。
4.4 考虑空转、滑行的列车位置误差
如图9所示,列车走行距离越大,则位置误差越大。在列车走行距离为150m且列车当前速度为20m/s时,进行轮径校正和不进行轮径校正条件下,位置误差分别为4.577m和10.519m。表5给出列车实际走行距离与该位置下位置误差在列车走行距离中所占的比例。从表5中可以看出,随着列车走行距离增加,列车位置误差所占的比例越来越小。考虑空转、滑行现象后,位置误差明显增大,故应将空转、滑行考虑在实际应用中。同样,轮径校正后的位置误差有所改善,证明在实际工程应用中有必要实现轮径校正功能。
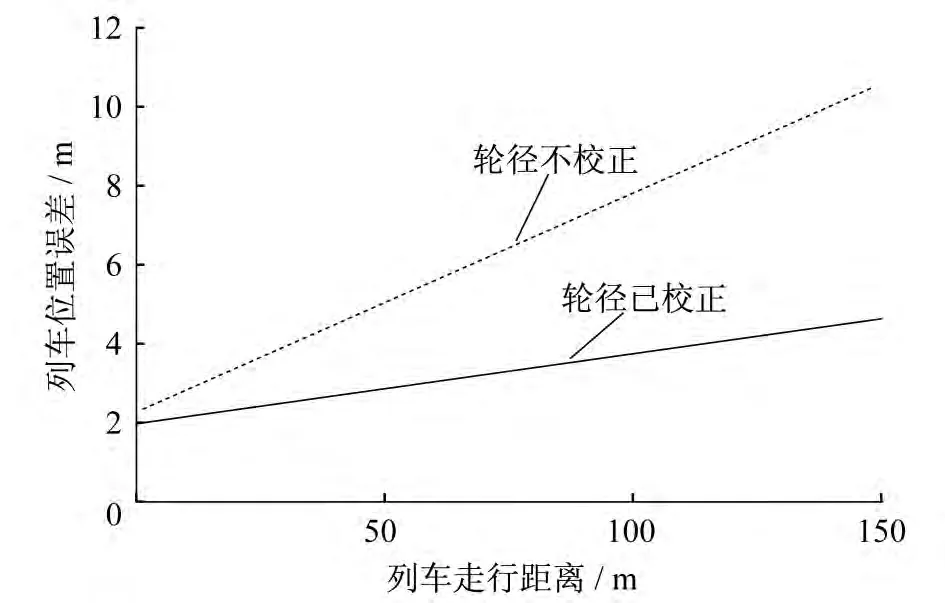
图9 考虑空转、滑行的列车位置误差曲线
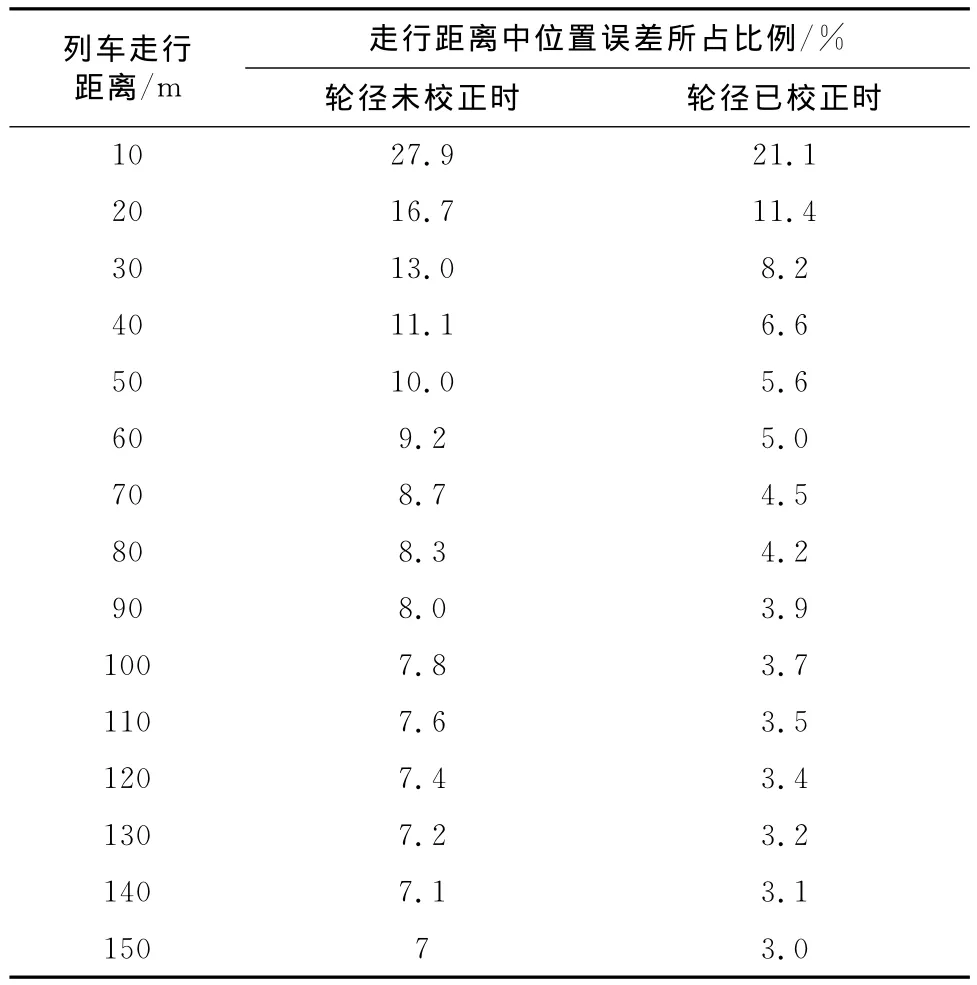
表5 列车位置误差所占比例表(考虑空转、滑行,列车速度为20m/s)
5 结论
利用MATLAB软件编写列车测速定位误差仿真程序,对列车在不同运行条件下的速度和位置误差进行研究。其运行条件包括车载设备是否完成轮径校正功能,是否考虑列车车轮空转、滑行现象等。通过仿真结果可知,轮径校正功能可以减小列车测速定位的误差,车载设备有必要去实现该功能。在考虑列车空转、滑行现象时,列车的测速定位误差会增加,所以车载设备必须考虑列车车轮空转、滑行的影响。
利用列车测速定位误差仿真程序可以对不同输入参数和列车测速定位误差之间的关系进行研究,研究各个输入参数的变化对列车速度位置误差变化的影响,可找出各个参数中对列车测速定位误差影响最为严重的参数,再根据研究结果,来优化车载设备系统的参数设计。
[1]陈锋华,刘岭,徐松.基于通信的列车控制(CBTC)系统[J].铁路通信信号工程技术,2005,1(1):40.
[2]刘晓娟.城市轨道交通CBTC系统关键技术研究[D].兰州:兰州交通大学,2009.
[3]Moniea M,Paolo T,Benedetto A,et al.Train speed and position evaluation using wheel velocity measurements[C]∥Bruno Siciliano 2001IEEE/ASME International Conference on Advanced Intelligent Mechatronics Proceedings.Italy:IEEE,2001:478.
[4]Benedetto A,Valentina C,Moniea M.Train position and speed estimation using wheel velocity measurement[C]∥Iwnicki S D.Proceedings of the IMechE Part F.London:Journal of Rail and Rapid Transit,2002:216.
[5]刘进,吴汉麒.轨道交通列车定位技术[J].城市轨道交通研究,2001(l):30.
[6]周达天.基于多传感器信息融合的列车定位方法研究[D].北京:北京交通大学,2007.
[7]张振兴.城市轨道交通中的列车定位方法研究[D].北京:北京交通大学,2008.
[8]刘锋.基于通信的列车控制模式下的列车定位技术[J].城市轨道交通研究,2012(4):48.
猜你喜欢
铁路通信信号工程技术(2022年9期)2022-09-22
科学与生活(2021年19期)2021-10-30
国学(2020年1期)2020-06-29
小读者(2019年24期)2020-01-19
重庆理工大学学报(自然科学)(2019年8期)2019-09-19
汽车观察(2019年2期)2019-03-15
铁道学报(2018年5期)2018-06-21
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18