基于PR调节器的异步电机转子磁链观测
2014-07-07 15:30王秀芹王群京李国丽漆星方圆武琼孟强董安邦
电气传动 2014年8期
王秀芹,王群京,李国丽,2,漆星,4,方圆,武琼,孟强,董安邦
(1.安徽大学电气工程与自动化学院,安徽合肥230601;2.高节能电机及控制技术国家地方联合实验室(安徽大学),安徽合肥230601;3.教育部电能质量工程研究中心(安徽大学),安徽合肥230601;4.安徽省工业节电与用电安全实验室(安徽大学),安徽合肥230601)
基于PR调节器的异步电机转子磁链观测
王秀芹1,王群京2,3,李国丽1,2,漆星1,4,方圆1,武琼1,孟强1,董安邦1
(1.安徽大学电气工程与自动化学院,安徽合肥230601;2.高节能电机及控制技术国家地方联合实验室(安徽大学),安徽合肥230601;3.教育部电能质量工程研究中心(安徽大学),安徽合肥230601;4.安徽省工业节电与用电安全实验室(安徽大学),安徽合肥230601)
针对传统的积分环节跟踪交流输入信号可能产生幅度和相位误差的问题,基于PR调节器提出一种改进的异步电机转子磁链观测方法,这种方法可以降低转子电动势积分的静态误差,具有良好的磁链和转速观测精度,改善了磁链的畸变和运行特性。系统仿真与实验结果均验证了该方法的有效性。
异步电机;转子磁链;磁链畸变
1 引言
异步电动机输入量与输出量呈非线性微分关系,其高动态调速性能基于动态模型,分析异步电动机的转矩和磁链的控制规律,制定高性能异步电动机的调速方案。矢量控制系统是目前应用最多的高性能交流电动机调速系统。其思想是通过矢量变换,将三相电机的定子电流变换到以转子磁场定向的轴系中,按需求调节力矩后,将控制量反变换到三相坐标系统,逆变器调节电机的定子电流和频率,进而实现磁场电流和转矩电流的独立控制,使两者非线性解耦。
本文在转子磁链定向矢量控制思想基础上,求解电机状态方程,构建基于比例积分(PI)调节器的混合转子磁链模型,并针对纯积分环节产生的静态误差,进一步提出一种基于PR调节器的转子磁链模型观测,解决了PI调节器无法正确跟踪交流信号的问题,使得转子磁链及转速的观测值更为精确。
2 转子磁链模型的建立
转子磁链的直接检测复杂难以实施,实用的系统中多按模型计算,即利用容易测得的电压、电流或转速等信号,借助于转子磁链模型,实时计算磁链的幅值与空间位置。转子磁链可以从电动机数学模型推导,也可利用状态观测器或状态估计得到观测模型。在实用的计算模型中,由于实测信号的不同,分为电流模型和电压模型。
2.1 转子磁链的电流模型
转子磁链在同步旋转坐标系下(ω=ωe=ωΨr)方程如下:

式中:Lm为互感;τr为转子时间常数,τr=Lr/Rr;ωe为转子电角度。
在电流模型中,转子磁链矢量与d轴同步重合,制约条件为


式(4)、式(5)系经典转子磁链矢量状态方程,park-1变换后转换到静止坐标系中的方程为
式中:θΨr为转子磁链角,
2.2 转子磁链的电压模型
同步旋转坐标系下,定子电压方程为

从而得到定子磁链矢量的状态方程为

2.3 带有电压补偿的混合模型
电流模型精度高,转速适应性强,但输入量须转速信号,适应低速。电压模型受电机参数影响小,算法易于实现,但输出结果存在积分初值和累计误差,更适合中高速范围。考虑两种模型的原理和优化,根据控制理论,引入经过电压修正值,建立转子磁链矢量的混合模型。
式中:Rs为定子电阻。
补偿电压由PI调节器控制,方程式如下:

公式中的比例增益Kp,积分时间常数TI的选择取决于电机的速度。低速时,电流模型占主导地位,中高速时则更多取决于电压模型。电流模型中定子磁链矢量静止坐标系下的状态方程可由转子磁链方程推导:

式中:Ls为定子自感;Lm为转子自感。改进后转子磁链方程为


转子磁链角为

模型框图如图1所示。
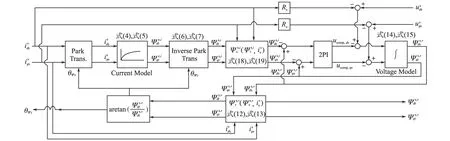
图1 PI模型框图Fig.1 The block diagram of the PI model
3 谐振比例算法
以上带有PI调节器的混合模型大大改善了单电压或电流模型产生的调速范围局限性和电机参数变化所引起的负面影响。但实际运行中,由于电机实际模型与观测器模型之间存在一定的偏差,PI调节器不能实现对交流输入的完美跟踪,必然会产生误差。在此基础上提出具有良好交流跟踪和调控特性的PR调节器,校正修正项中的误差,获得更精确的磁链观测。
PR控制器,由比例环节和谐振环节组成,可对正弦量实现无静差控制。当控制系统的参考输入为正弦信号时,在被控对象传递函数没有正弦内模的情况下,系统的调节器传递函数应包含正弦内模,即正弦传递函数为s/(s2+ω2),图2是ω=100π时的Bode图,由幅频曲线可知传函在频率点ω0处为高增益,对其他频率信号衰减很大。由相频曲线可知传函有90°的相角裕度,满足系统的稳定性要求。但是从图2中可以看到传函仅在ω0处有高增益,其他频点是大幅衰减,存在高增益频带过窄的缺点,将导致系统对输入信号频率参量过度敏感,在实际系统中易引起系统的波动。为了增大系统带宽、提高系统的稳定性,采用其改进的调节器模型:


图2 ω=100π时Bode图Fig.2 Bode diagram whenω=100π
在确定正弦内模传函的基础上,为加快系统的动态响应引入比例环节,则PR调节器的传递函数为

式中:Kp为比例系数;Ki为增益系数;ωc为截止频率;ω0为谐振频率。
图3给出ωc=2rad/s和ωc=10 rad/s时Bode图,由此可知,ωc的引入改善了调节器的频带特性,没有改变其在频率点ω0处的最大增益特性;通过比较可知,ωc越小,选频特性越好;但对于在实现数字化过程中由截断误差造成的频率参数偏移或系统外干扰引起的频率波动而言,ωc越小,调节器增益波动较大,影响系统稳定性。在实际应用中,ωc的取值范围为5~15 rad/s时取得很好的效果。Kp的选择可大大改善系统的动态特性,但过大将引起输出过冲。Ki用于改善基频增益特性。
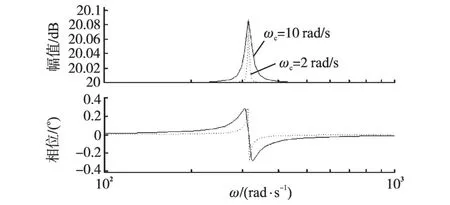
图3 ωc=2rad/s和ωc=10 rad/s时Bode图Fig.3 Bode diagram whenωc=2rad/s和ωc=10 rad/s
将PR调节器引入转子磁链观测模型的系统框图如图4所示。
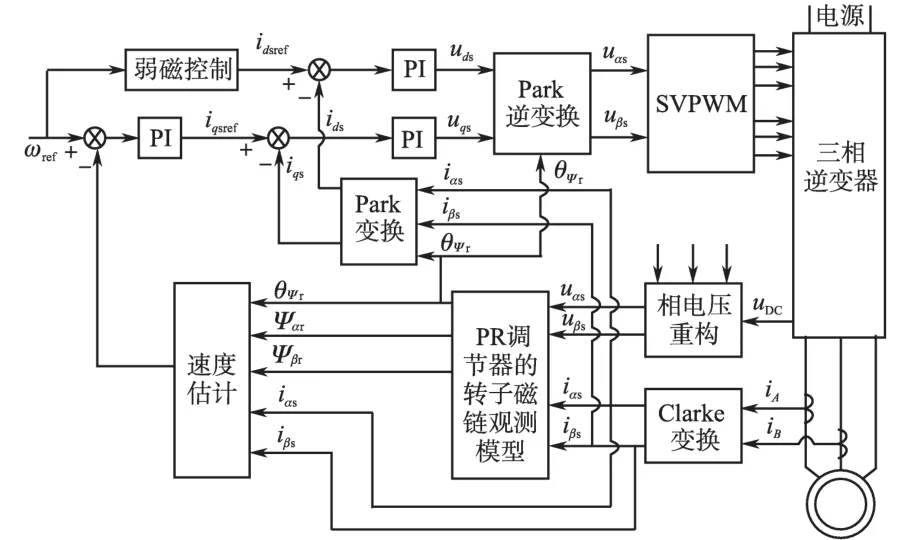
图4 PR模型系统框图Fig.4 The block diagram of the PR model system
4 仿真与实验
4.1 仿真结果
在Matlab/Simulink环境下搭建控制系统仿真模型。采用两对极鼠笼式异步电机,相关参数为:PN=15 kW,UN=380 V,IN=57 A,fN=50 Hz,nN=1 500 r/min,Lm=30 mH,Lr=0.87 mH,Ls=0.87 mH,Rr=0.165 8 Ω, Rs=0.072 Ω。
分别采用PI调节混合模型和带PR调节器的改进模型,在相同负载条件下仿真转子磁链输出如图5所示。
由仿真结果可以看出,在相同负载条件下,PI调节混合模型转子磁链输出较纯电压模型更精确,静态误差和直流分量较小,PR调节器的改进模型磁链输出较前两者在区域内效果理性收敛迅速,具有较好的跟踪和动态特性,准确度高、误差小。
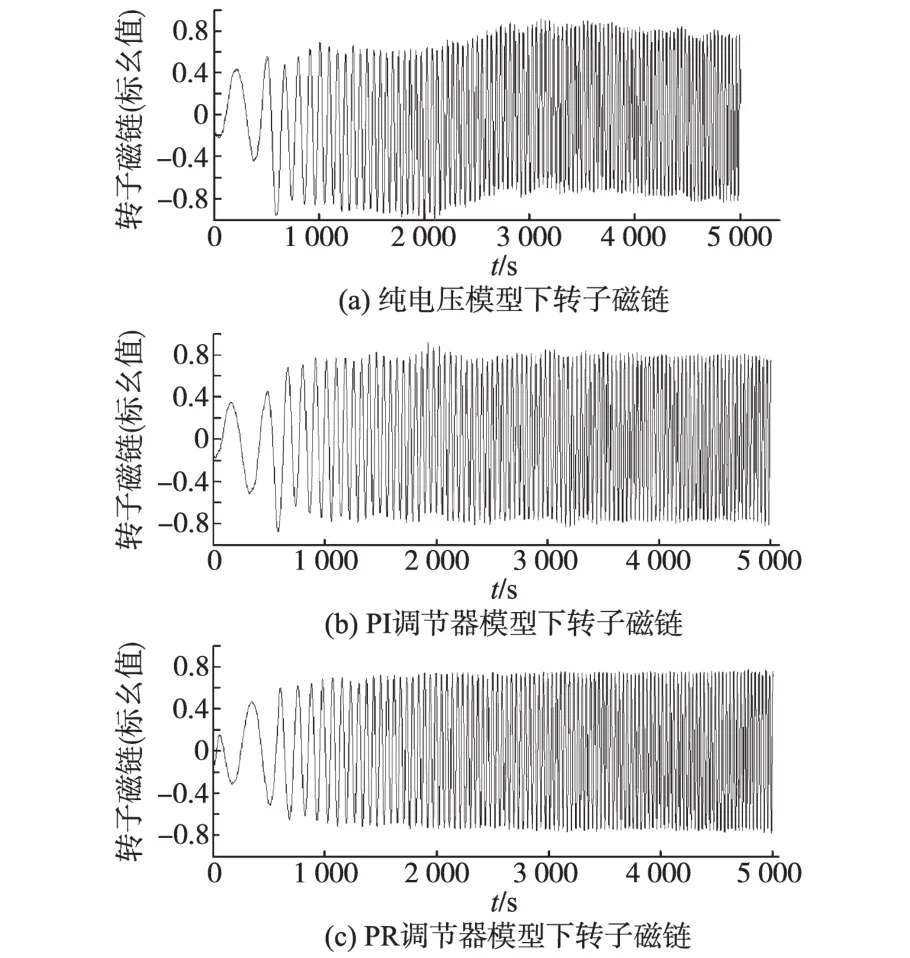
图5 3种模型下转子磁链输出Fig.5 The rotor flux of three kinds model
4.2 实验结果
在基于TM320F28335核心处理器基础的三相异步电机实验平台上进行验证实验,其中异步电机的参数与仿真模型相同。分别在PI调节器混合模型和PR调节器改进模型基础上进行算法实现。波形如图6所示。
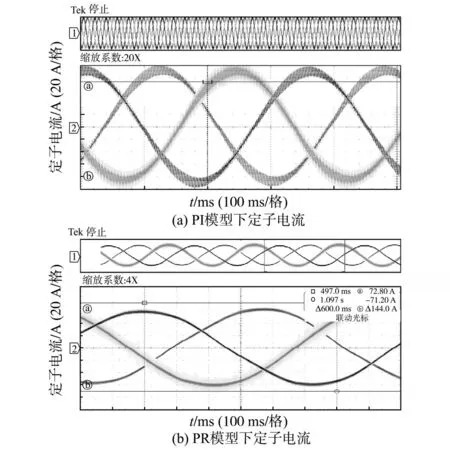
图6 两种模型下定子电流Fig.6 The stator current of two model
图6a、图6b分别为采用PI调节器和PR调节器磁链模型定子电流的实验输出,可以看出采用PR调节器,电机在启动和运行过程中波动较小,更加平稳,畸变率较小。
5 结论
论文根据控制系统理论提出了新的异步电机磁链观测方案。以电动机的动态模型为参考,构建了基于PR调节的带电压补偿的转子磁链观测模型。这种方案解决了电动机模型中纯积分环节产生累计误差和零点漂移的问题,改善了PI调节器不能完美跟踪交流信号从而产生误差的状况。改进的磁链模型可以快速准确定位转子磁链角,磁链算法简单、结果精确,便于实现。
[1] 陈东华,谢少军,周波.瞬时值电流控制逆变器技术比较[J].南京航空航天大学学报,2004,36(3):343-347.
[2] 何俊,彭力,康勇.PWM逆变器PI双环模拟控制技术研究[J].通信电源技术,2007,24(3):1-3.
[3] 杨国权,段善旭,樊明武.基于状态观测器的中频逆变器双环控制方案[J].电力电子技术,2007,41(3):64-66.
[4] 周涌,陈庆伟,胡维礼.内模控制研究的新发展[J].控制理论与应用,2004,21(3):477-482.
[5] Yukihiko Sato,Tomotsugu Ishizuka,Kazuyoshi Nezu,et al.A New Control Strategy for Voltage-type PWM Rectifiers to Realize Zero Steady-state Control Error in Input Current[J].IEEE Trans.on Power Electronics,1998,34(3):480-486.
[6] Takabashi Nanuchi T.A New Quick-response and High-efficiency Control Strategy of an Induction Motor[J].IEEE Transaction Industrial Application,1986,22(5):820-827.
[7] 元迎川,胡荣强,王杰,等.基于比例谐振调节器的恒压恒频逆变器研究[J].电工电能新技术,2011,30(1):52-55.
[8] 奚国华,沈红平,喻寿益,等.异步电机无速度传感器直接转矩控制系统[J].中国电机工程学报,2007,27(21):76-82.
[9] 刘培刚.异步电机转子磁链两种电流观测模型的仿真研究[J].电气开关,2009,47(5):42-44.
[10]Jun Hu.New Integration Algorithms for Estimating Motor Flux over a Wide Speed Range[J].IEEE Transaction on Power Electronics,1998,113(5):969-977.
[11]韦立祥.一种消除电压型磁链观测器中直流偏置误差的新方法[J].清华大学学报:自然科学版,2001,41(9):51-54.
[12]王正林.MATLAB/Simulink与控制系统仿真[M].北京:电子工业出版社,2005.
[13]李永东.交流电机数字控制系统[M].北京:机械工业出版社,2002.
[14]李华德,白晶,李志民.交流调速控制系统[M].北京:电子工业出版社,2003.
[15]陈伯时,陈敏逊.交流调速系统[M].第2版.北京:机械工业出版社,2006.
[16]李永东.交流电机数字控制系统[M].北京:机械工业出版社,2002.
[17]用渊深.交直流调速系统与MATLAB仿真[M].北京:中国电力出版社,2003.
Observation on Asynchronous Motor Rotor Flux Model Based on P+Resonant Regulator
WANG Xiu-qin1,WANG Qun-jing2,3,LI Guo-li1,2,QI Xing1,4,FANG Yuan1,WU Qiong1,MENG Qiang1,DONG An-bang1
(1.School of Electrical Engineering and Automation,Anhui University,Hefei 230601,Anhui,China;2.National Engineering Laboratory of Energy-savring Motor&Control Technology,Anhui University,Hefei 230601,Anhui,China;3.Power Quality Engineering Research Center of China Ministry,Anhui University,Hefei 230601,Anhui,China;4.Anhui Province Laboratory of Electrical Economize and Safety,Anhui University,Hefei 230601,Anhui,China)
Concerning that the problem of traditional intergration regulator was likely to produce amplitude and phase errors for AC input signal,an improved induction motor rotor flux observation method based on P+Resonant Regulator was proposed.This method can decrease steady-state errors of the integration of rotor EMF,has preferably observe precision of rotor flux and speed of motor,reduce the degree of flux aberration and run characteristic.Experimental and simulation results are presented to fully support the claims.
induction motor;rotor flux;flux aberration
TM464
A
2013-08-27
修改稿日期:2014-02-02
国家科技支撑计划课题(2013BAF01B02,2013BAF01B01);国家自然科学基金项目(51307002,51177001);安徽省科技攻关项目(12010202040);安徽大学研究生学术创新项目(100117700633)
王秀芹(1989-)女,硕士研究生,Email:393128392@qq.com
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
汉字汉语研究(2020年1期)2020-04-21
中共南宁市委党校学报(2017年4期)2017-10-21
美与时代·美术学刊(2017年1期)2017-03-24
美与时代·美术学刊(2016年11期)2017-02-04
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2014年17期)2014-04-04
电测与仪表(2014年11期)2014-04-04