无轴承异步电机的RFOC逆动态解耦控制
2014-07-07 15:30卜文绍祖从林路春晓王少杰
电气传动 2014年8期
卜文绍,祖从林,路春晓,王少杰
(河南科技大学信息工程学院,河南洛阳471003)
无轴承异步电机的RFOC逆动态解耦控制
卜文绍,祖从林,路春晓,王少杰
(河南科技大学信息工程学院,河南洛阳471003)
为解决三相无轴承异步电机这一多变量、非线性对象的强耦合性问题,首先分析了RFOC(转子磁链定向控制)条件下的无轴承异步电机状态方程;然后,进行了无轴承异步电机的整体系统可逆性分析,采用逆系统方法进行了转速和转子磁链之间、两个径向位移分量之间的动态解耦控制方法研究,给出了逆动态解耦控制系统结构。仿真结果表明,系统各状态变量之间实现了可靠的动态解耦控制,且具有良好的动静态控制性能,所给逆动态解耦控制方法是有效的、可行的。
无轴承异步电机;动态解耦控制;转子磁场定向;逆系统法
1 引言
无轴承电机是基于磁轴承与交流电机定子结构的相似性,通过在定子中嵌入相差一对磁极的悬浮控制绕组,从而打破原电机磁场的平衡,产生指向磁场增强方向的悬浮力,实现转子悬浮运行控制。因其具有无需润滑、无摩擦、无机械噪声等优点,已成为国内外研究热点[1-10]。但无轴承异步电机作为一个多变量、非线性、强耦合对象,要实现其高性能控制,需要实现各耦合变量之间的动态解耦[7,11]。逆系统方法是近年来针对复杂非线性系统提出的一种直接反馈线性化方法。关于无轴承异步电机的逆系统解耦控制,国内外已有研究[11-16],但通常是将电机方程定义在两相同步旋转坐标系下,逆系统表达式的求解过程比较复杂,复合成的伪线性系统含有不可观测的隐动态,从而影响系统的稳定性能。本文将无轴承异步电机定义在转子磁场坐标系下,忽略电流动态环节,以使电机模型尽可能简化,并利用逆系统方法将控制对象解耦为转速、转子磁链和2个径向位移等4个积分子系统,并在此基础上应用线性系统理论进行控制系统综合,实现电机的高性能控制。
2 无轴承异步电机的状态方程
无轴承异步电机电磁转矩的产生原理与普通异步电机基本相同。如果忽略转矩系统内部的定子电流动态,转矩模型采用定子电流作为控制量,可使电机转矩模型得以简化,从而降低系统实现的复杂性。则在d-q坐标系下,无轴承异步电机转矩系统状态方程可用三阶模型表示为
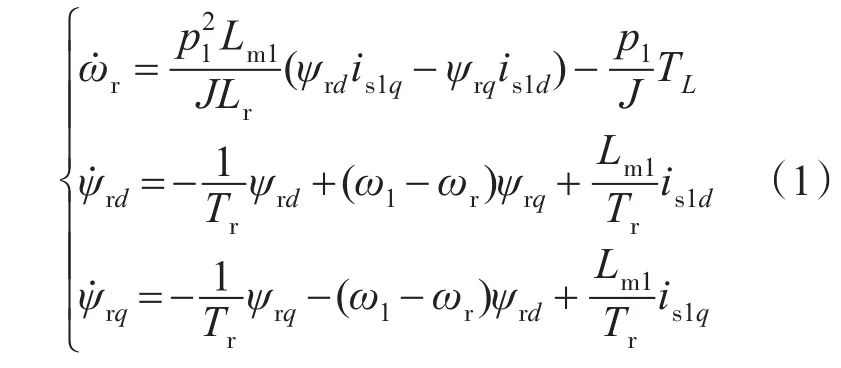
式中:ωr为电机转速;ω1为dq坐标系的角速度;ψrd,ψrq分别为转矩系统的转子磁链分量;is1d,is1q分别为转矩绕组的d,q轴电流分量;Lm1为转矩绕组与转子等效两相绕组的互感;Lr为转子等效两相绕组的自电感;J为转动惯量;p1为转矩绕组的磁极对数;TL为负载转矩。
把dq坐标系按转子磁链定向后,有ψr=ψrd,ψrq=ψ˙rq=0。将其带入式(1),整理得:
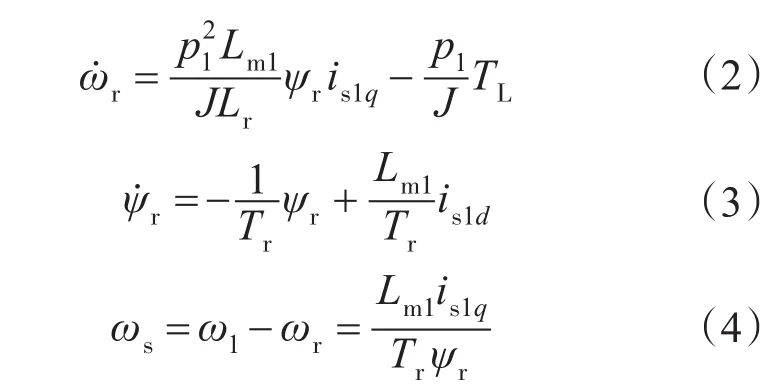
在转矩系统转子磁场定向时,基于电感矩阵的可控磁悬浮力模型可表示为

式中:M为定子4极与2极绕组之间的互感系数;α,β分别为静止坐标系中的转子径向位移分量;is2d,is2q分别为悬浮控制电流的d,q轴分量。
从以上模型可以看出:径向可控磁悬浮力分量Fα,Fβ是转矩绕组和悬浮绕组的d,q轴激磁电流分量相互耦合作用的结果。
在转子出现偏心时,由于气隙磁场分布不平衡,无轴承电机内部会产生一种单边电磁拉力,其大小可表示为

式中:ks为径向位移刚度系数。
无轴承异步电机转子径向位移运动方程为

式中:m为转子质量。
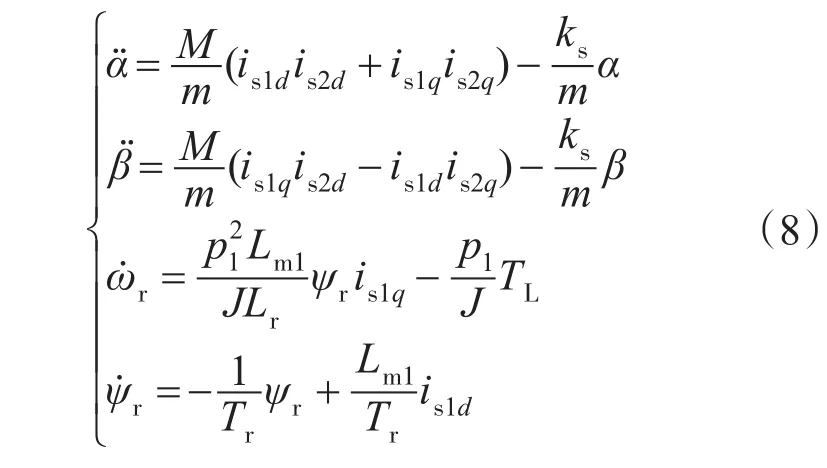
根据式(2)~式(7),整理可得无轴承异步电机的状态方程如下:
3 系统的逆动态解耦控制
分别选取系统的状态变量、输入变量和输出变量如下。
状态变量:

输入变量:

输出变量:

将式(9)~式(11)带入式(8),可得系统的状态控制方程如下:

由式(12)可以看出,转子磁场定向控制下的无轴承异步电机状态方程是一个4阶输入、4阶输出的6阶方程。与未经矢量定向的状态方程相比,不仅方程的阶数减少了一阶,而且其复杂程度也得以减弱[15]。
3.1 系统的可逆性分析
为分析系统的可逆性,根据Interactor算法,首先把输出变量Y=(y1, y2, y3, y4)T逐次对时间求导数,直至各个yi(i=1,2,3,4)的导数中显含输入控制量uj(j=1,2,3,4)。具体计算过程如下:
可得系统的如下Jacobi矩阵:

正常运行时,x6≠0,rank[A(x,u)]=4,A(x,u)是非奇异的;系统式(13)具有矢量相对阶α=(α1,α2,α3,α4)=(2,2,1,1),且:

因系统的相对阶数等于状态方程的阶数,因此系统是可逆的。取逆系统的输入为

根据隐函数定理可知,逆系统可表示为

而事实上,由于逆系统的状态满足:

因此,逆系统可采用附加积分器的实现形式,从而不需要原系统的全部状态反馈,避免了状态观测的困难。在不考虑负载及外界干扰作用时,逆系统的附加积分器具体表达式为

3.2 逆动态解耦控制系统结构
将逆系统串加在原系统的前面,则系统被补偿成为具有线性传递关系的伪线性复合系统。其中,转矩子系统经解耦后等效成2个一阶线性子系统,悬浮子系统等效为2个二阶积分子系统。
针对线性化解耦的各个子系统,分别设计相关控制器,构成复合控制系统,从而可使系统获得优良的动静态性能和抗干扰能力。其中,转矩子系统经解耦后等效成2个一阶线性子系统,采用PI控制器分别控制转速和电机磁链;而悬浮子系统可等效为2个二阶积分子系统,采用PD控制器进行径向位移的调节控制。
无轴承异步电机的逆动态解耦控制系统结构和转子磁场旋转坐标系中逆系统的附加积分器实现,如图1所示。其中:
1)转子磁链可由式(3)得到,为


图1 无轴承异步电机逆动态解耦控制系统结构框图Fig.1 Inverse dynamic decoupling control system diagram of bearingless induction motor
4 系统仿真与验证分析
针对上述分析,本文以带2极悬浮绕组(p2=1)的4极(p1=2)无轴承异步电机样机为对象,按照图1所示的控制系统,利用Matlab/Simulink进行仿真研究。无轴承异步电机参数为:1)定子内径r=62 mm,电机有效铁心长度l=0.82 mm,样机气隙δ0=0.6 mm,辅助轴承间隙δ1=0.2 mm;2)4极转矩系统,额定功率P=2.2 kW,转矩绕组电阻Rs=1.6 Ω,转子电阻Rr=1.423 Ω,定子漏感Ls1l=0.004 3 H,转子漏感Lr1l=0.004 3 H,转矩绕组互感Lm1=0.085 9 H,转子的转动惯量J=0.024 kg·m2;3)2极磁悬浮系统,悬浮绕组电阻Rs2=2.7 Ω,定子漏感Ls1l=0.00398H,转子漏感Lr1l=0.00398 H,悬浮绕组互感Lm2=0.230 H。
取转子初始径向位移α0=-0.1 mm,β0=-0.2 mm;取转速给定n*=1 500 r/min,磁链给定Ψ*=1 Wb,径向位移给定α*=β*=0,电机空载启动。为验证系统的动态解耦性能,在仿真过程中使系统的几个给定信号在不同时刻发生突变。图2给出的是以上仿真条件下的解耦控制系统仿真波形。其中,图2a~图2d分别为转速、磁链、α向位移、β向位移的响应曲线。
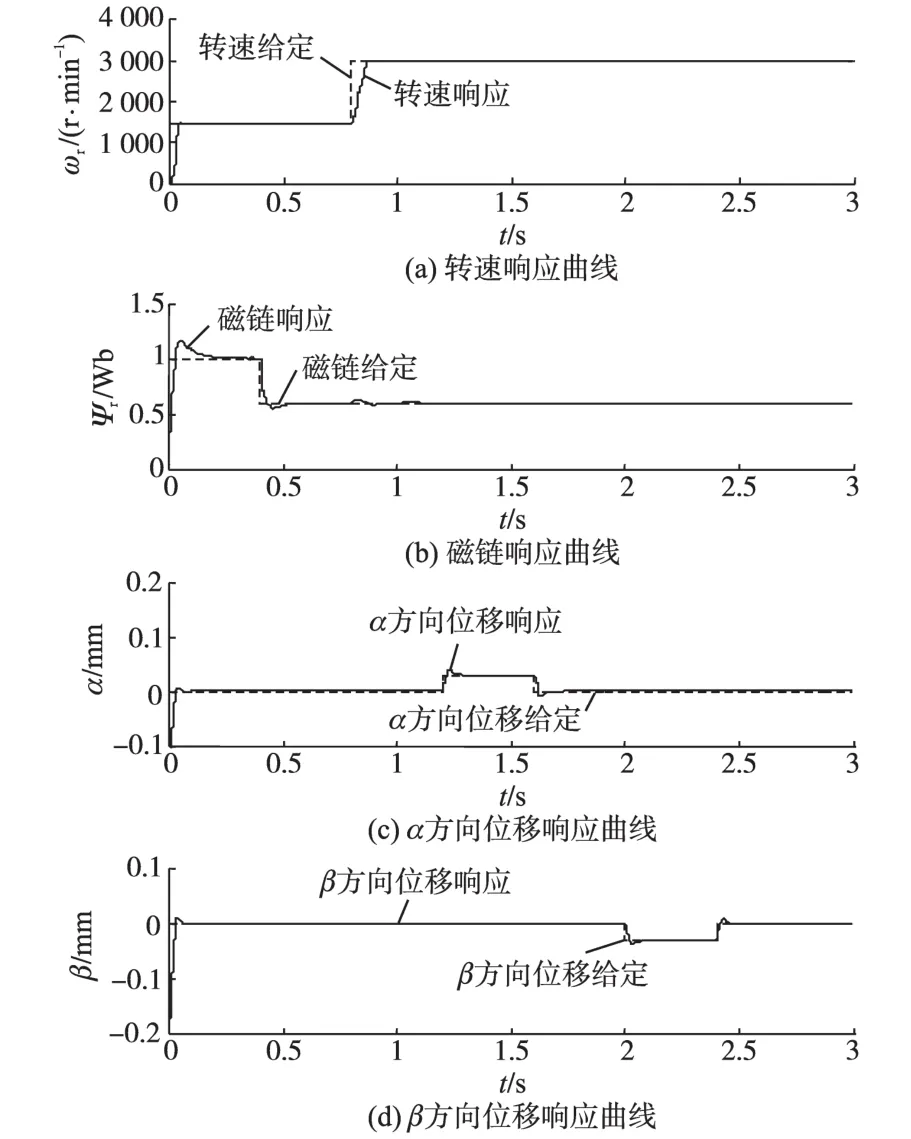
图2 逆动态解耦控制系统的响应曲线Fig.2 Response curves of inverse dynamic decoupling control system
从图2仿真结果可以看出:1)空载启动时,电机转速在0.1 s以内能迅速达到给定值,基本无超调;α和β2个径向位移分量经过小幅波动后,在0.1 s内都能准确跟踪上给定值,快速稳定起浮;转子磁链在0.2 s内达到稳定状态;2)为了验证4极转矩系统与2极悬浮系统之间、转速和转子磁链子系统之间的解耦控制性能,在0.4 s时刻把转子磁链给定值突减至0.6 Wb,在0.8 s时刻把转速给定值突增到3 000 r/min(即100 Hz)。在转速、转子磁链的变化过程中,α和β两个径向位移分量基本无变化,表明4极转矩系统和2极悬浮系统实现了动态解耦。在磁链的变化过程中,转速几乎没有变化;在转速的变化过程中,转子磁链变化很小,表明转速和转子磁链2个子系统之间具有较好的动态解耦控制性能;3)为了验证2个径向位移子系统之间的解耦控制性能,在1.2 s时刻把位移给定α*由0突变至0.03 mm(即30 μm),并在1.6 s时刻把α*恢复到0;在2.0 s时刻把位移给定β*由0突变至-0.03 mm(即-30 μm),并在2.4 s时刻把β*恢复到0。从仿真响应曲线可以看出:2个径向位移分量的变化过程几乎彼此互不影响,表明α,β2个径向子系统之间具有较好的动态解耦控制性能;4)当电机稳定运行后,在2.6 s时刻突加5 N·m转矩负载时,转速、α和β2个径向位移分量基本上都没有变化,不但进一步验证了4极转矩控制系统和2极悬浮控制系统之间较好的解耦性能,还表明了系统较强的抗干扰能力。
5 结论
本文在无轴承异步电机状态方程分析的基础上,进行了系统可逆性分析,并采用逆系统方法进行了转速和转子磁链之间、2个径向位移分量之间的动态解耦控制研究,给出了逆动态解耦控制系统结构。仿真结果表明,采用所给解耦控制方法,不仅可以实现4极转矩系统和2极悬浮系统之间的可靠解耦控制,还可实现转速与磁链之间,α与β2个径向位移分量之间的动态解耦控制,而且系统具有动态响应速度快、抗干扰能力强的特点。所给解耦控制策略是可行的,从而为三相无轴承异步电机高性能动态解耦控制器的研究和设计打下了理论和技术基础。
[1] Junichi Asama,Yuki Hamasaki,Takaaki Oiwa,et al.Proposal and Analysis of a Novel Single-drive Bearingless Motor[J].IEEE Trans.on Industrial Electronics,2013,60(1):129-138.
[2] Valci F Victor,Filipe O Quintaes ,José S B Lopes,et al.Analysis and Study of a Bearingless AC Motor Type Divided Winding Based on a Conventional Squirrel Cage InductionMotor[J].IEEE Trans.on Magnetics,2012,48(11):3571-3574.
[3] 王喜莲,葛宝明,王旭东.一种无轴承开关磁阻电机悬浮性能分析[J].电机与控制学报,2013,17(1):7-11.
[4] Chiba A,Santisteban J A.A PWM Harmonics Elimination Method in Simultaneous Estimation of Magnetic Field and Displacements in Bearingless Induction Motors[J].IEEE Transactions on Industry Applications,2012,48(1):124-131.
[5] Akira Chiba,Fellow,IEEE,et al.Influence of Rotor Skew in Induction Type Bearingless Motor[J].IEEE Transactions on Magnetics,2012,48(11):4646-4649.
[6] 丁强,王晓琳.无轴承永磁电机悬浮波动抑制策略[J],电气传动,2012,42(8):6-9.
[7] 邓智泉,王晓琳,张宏荃,等.无轴承异步电机的转子磁场定向控制[J].中国电机工程学报,2003,23(3):89-92.
[8] 卜文绍,王少杰,黄声华.三相无轴承异步电机的解耦控制系统[J].电机与控制学报,2011,15(12):32-37,43.
[9] 张汉年,刘合祥.基于模糊补偿的无轴承同步磁阻电机径向位置逆控制[J].电气传动,2011,41(6):40-44.
[10]卜文绍,袁澜,肖隽亚,等.无轴承异步电机的感应补偿控制研究[J].电气传动,2012,42(3):11-14.
[11]孙晓东,朱熀秋,张涛,等.无轴承永磁同步电机径向悬浮力动态解耦控制[J].电机与控制学报,2011,15(11):21-26.
[12] Zhu Huangqiu,Zhou Yang,Li Tianbo,et al.Decoupling Control of 5 Degrees of Freedom Bearingless Induction Motors Usingα-th Order Inverse System Method[J].Acta Automatica Sinica,2007,33(3):273-278.
[13]孙晓东,朱熀秋.基于神经网络逆系统理论无轴承异步电动机解耦控制[J].电工技术学报,2010,25(1):43-49.
[14] Wang Zhengqi,Liu Xianxing.An Improved Rotor Flux Oriented Control System of Bearingless Induction Motors[C]//Chinese Control and Decision Conference,2010:2733-2737.
[15]李青,刘贤兴.基于转子磁场定向的无轴承异步电机逆系统解耦控制[J].电机与控制应用,2010,37(2):8-12.
[16] Sun Xiaodong,Zhu Huangqiu,Zhang Tao.Sliding Mode Variable Structure Control for Radial Suspension Forces of Bearingless Permanent Magnet Synchronous Motor Based on Inverse System Method[C]//Proc of 6th IPEMCC,Wuhan,China,2009:1848-1851.
RFOC Inverse Dynamic Decoupling Control of Bearingless Induction Motor
BU Wen-shao,ZU Cong-lin,LU Chun-xiao,WANG Shao-jie
(College of Information Engineering,Henan University of Science&Technology,Luoyang 471003,Henan,China)
To solve the strong coupling problem of three-phase bearingless induction motor which is a multivariable,nonlinear object,the state equation of bearingless induction motor based on RFOC(rotor flux orientation control)was analyzed.Then,the reversibility of the overall system was discussed according to the mathematical model of bearingless induction motor,the dynamic decoupling control method for the speed,rotor flux linkage and the two radial displacement components was researched based on inverse system method,the decoupling control system structure was presented.Simulation results show that the dynamic decoupling control has been achieved between those system state variables reliably;moreover,a good dynamic and static performance has been achieved.The proposed decoupling control method is effective and feasible.
bearingless induction motor;dynamic decoupling control;rotor flux orientation;inverse system method
TM343
A
2013-09-16
修改稿日期:2014-02-28
国家自然科学基金项目(51277053);河南省国际科技合作项目(114300510029);河南省教育厅自然基金项目(2010B510011)
卜文绍(1969-),男,博士,副教授,Email:wsbu@163.com
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年2期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
云南电力技术(2015年2期)2015-08-23
电测与仪表(2014年17期)2014-04-04
电测与仪表(2014年11期)2014-04-04