基于光电传感器的目标轮廓提取及其识别
2014-07-13 05:52查长军高先和
宿州学院学报 2014年2期
查长军,高先和,谭 敏
合肥学院电子信息与电气工程系,安徽合肥,230601
1 问题的提出
对于边境或无人区而言,经常出现的目标主要是人和动物,由于外形轮廓存在较大差异,因此可以将轮廓作为特征对目标进行识别。然而,目前的研究更多的是采用传统的方法来判别目标类别[1-2],且没有深入探究测试样本特征维数对识别性能的影响。
本文针对以上问题,利用主动式传感器组构成前端采集系统,并结合稀疏表示理论[3-6],给出了一种基于稀疏表示的目标轮廓识别(Sparse Representation Profiling Classification,SRPC)算法,并与传统算法在多个方面进行了性能比较。
2 轮廓特征提取及其数据表示
本文主要采用S个主动式光电传感器组成传感单元,均匀间隔地安装在长为2m的垂直支架上,如图1所示。由于采用的传感器输出只有高低电平两种状态,因此,当物体经过传感器视场时,通过读取各传感器输出状态信息并显示出来,即可得到近似物体外形轮廓图像。
假设经过第i(1≤i≤S)个传感器视场时,光电传感器输出状态信号为xi(t),前端抽样信号为:

式中T为抽样周期。利用抽样信号s(t)对输出信号xi(t)进行抽样,可得到:


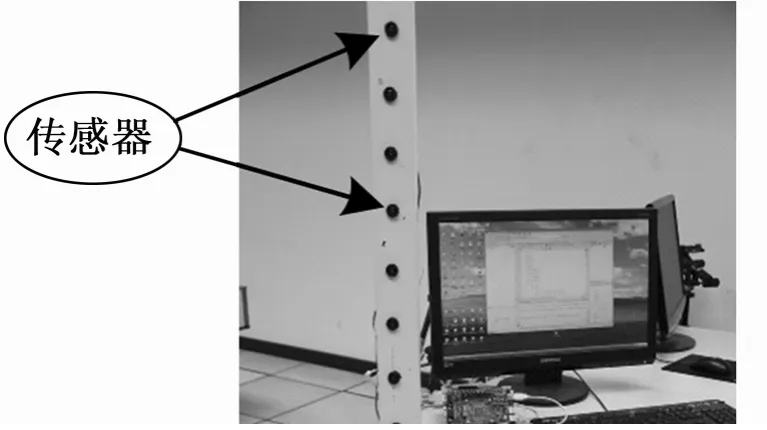
图1 稀疏传感器采集系统
若信号pi(t)的每个抽样值表示为pi,n,则S个传感器同时被抽样时,所有样值组成的矩阵即为物体轮廓图像的一种稀疏近似表示形式:
其中L为总的抽样数。
由于传感器抽样率一定,当不同物体以不同速度经过传感器视场时,得到的抽样数L也就不同。为便于处理,将稀疏矩阵P转换成维数大小相同的矩阵Q∈ RS×n(n<L)。
本文主要研究单人、单人蹲下、双人以及动物(狗)4种轮廓分类问题。在实际应用中,由于目标进入传感视场时的速度、位置以及姿态等条件不同,本文收集了多角度、不同速率和姿态进入视场的样本进行训练,如图2所示。

图2 物体轮廓图像
3 稀疏表示
对于一个k类分类问题,假设每一类的训练样本数为N1,N2,…,Nk,每个样本矩阵大小为S×h;若按列向量υ∈Rm(m=S×h)排列,则k类所有样本组成训练样本矩阵为D= [v1,1,v1,2,…,vk,nk]∈Rm+N,其中N=N1+N2+…+Nk;若给定一个测试样本y∈Rm,则该样本可由所有训练样本线性表示:

其中x∈RN为系数向量。若y属于第i类,则除该类样本系数不为零外,其他类样本系数都为零。根据稀疏表示理论可知,由于系数向量稀疏,因此可以通过l1范数得到向量x的估计[7-10],即:

为了得到训练样本矩阵,将收集到的物体轮廓样本进行如下处理。
算法:
(1)输入:物体轮廓样本Pi∈RS×Li(i≤N);
(2)将各样本矩阵Pi转换成维数大小相同的矩阵Qi∈RS×n(n<Li);
(3)将矩阵Qi按列向量排成一列,得到向量qi∈Rt(t=S×n);
(4)将所有向量按列组合在一起即可得到训练样本矩阵:D∈ [q1,q2,…,qN]∈ Rt×N。
4 分类算法
根据以上过程可知,由于测试样本与其稀疏表示系数中的非零系数值类别相一致,因此,本文根据稀疏表示系数中较大值对测试样本进行分类,算法过程如下。
SRPC算法:
(1)输入:训练样本矩阵D∈Rt×N和测试样本P∈ RS×L;
(2)预处理:① 按列归一化训练样本矩阵D;②将测试样本P按照上节算法转换成列向量p∈Rt(t=S×n);
(5)类别判别准则:最小残差对应的类别判为测试样本类别。
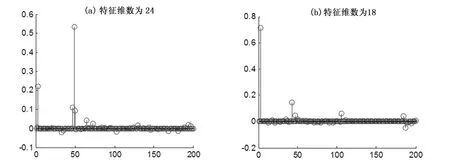
图3 不同维数的测试样本系数
5 实验仿真与结果分析
实验采用了S=16个光电传感器组成前端稀疏信号捕获单元,通过稀疏传感器采集系统收集了单人、双人、单人蹲下以及动物(狗)4类轮廓样本构建训练样本库。由于采样获取的稀疏信号矩阵大小不同,为便于后期处理,采用SRPC算法,将采集的样本处理成大小为16×h矩阵。每类训练样本数为50,样本总数为200;每类测试样本数为50,测试样本总数为200。实验方法主要是将本文提出的SRPC算法与传统的NN、KNN、SVM、ID3分类方法进行性能比较。
实验1 稀疏性分析:同一个单人轮廓样本转换成不同维数矩阵,采用随机矩阵进一步降维,然后求解得到的系数向量稀疏程度如图3所示。从图中可以看出,尽管转换后的样本维数不同,但系数向量仍然稀疏,且较大值系数分布在单人类别。
实验2 样本特征维数不同时,各方法识别性能比较:实验条件设置如表1所示,采用随机矩阵将样本投影到设定的维数,在同一个特征维数测试样本循环测试20次,取其平均值作为该特征维数下的识别率,实验仿真结果如图4所示。从图4(a)中可以看出,分类效果较好的SRPC与NN方法性能较接近,在特征维数为18时,SRPC识别率已达到95.8%,随着特征维数的增加,SRPC、SVM、NN 和KNN4种方法分类效果渐渐趋于一致;当样本矩阵Q大小为16×16时,样本维数相对图4(b)来说增加了1倍,特征维数为16时,识别率较高的SRPC方法识别率为95.4%,而其他4种方法识别率最大为94.75%,略低于本文方法;从图4(b)中可以看到,SVM、KNN与NN方法分类效果较为一致;随着特征维数的增加,SRPC、SVM、KNN和NN4种方法分类效果趋于一致;而图4中ID3方法分类效果最差。
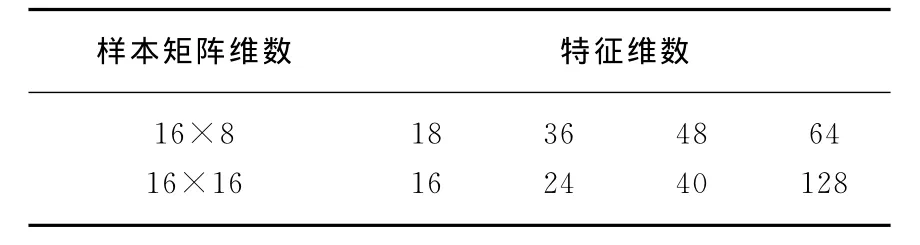
表1 实验设置

图4 不同特征维数识别率比较
6 结 语
本文针对不同类型物体外形轮廓特征不同,给出了一个基于光电传感器的稀疏轮廓图像采样系统,结合稀疏表示理论,提出了一种基于稀疏表示的目标轮廓识别算法。数值仿真与实验结果表明:在不同的特征空间,提出的SRPC算法对不同类型物体轮廓具有良好的分类效果;能够较好地识别不同角度、运动速度及姿态等各种情况的稀疏轮廓信息,识别性能具有很好的鲁棒性。然而,在实际应用中,可能有多类物体同时进入稀疏传感器检测视场时,如何正确识别物体类别组合有待下一步研究。
[1]David J Russomanno,Srikan Chari,Kenny Emmanuel,et al.Testing and Evaluation of Profiling Sensors for Perimeter Security[J].ITEA,2010,31(1):121-130
[2]Ronald B Sartain,Keith Aliberti,Troy Alexander,et al.Long-wave infrared profile feature extractor(PFx)sensor[C]//SPIE Defense,Security,and Sensing.International Society for Optics and Photonics:Orlando,Florida,USA,2009:733311-733311-7
[3]Donoho D L.Compressed sensing[J].IEEE Transactions on Information Theory,2006,52(4):1289-1306
[4]Candès E.Compressive sampling[C]//Proceedings oh the International Congress of Mathematicians.Madrid,2006:1433-1452
[5]John Wright,Allen Y.Yang,Arvind Ganesh S,et al.Robust Face Recognition via Sparse Representation[J].IEEE Transactions,2009,31(2):1-18
[6]Katia Estabridis.Automatic target recognition via sparse representations[C]//SPIE Defense,Security,and Sensing.International Society for Optics and Photonics.Orlando,Florida,2010:769600-769600-9
[7]Candès E Tao T.Near optimal signal recovery from random projections:Universal encoding strategies[J].IEEE Transactions on Information Theory,2006,52(12):5406-5425
[8]Candès E,Tao T.Decoding by linear programming[J].IEEE Transactions on Information Theory,2005,51(12):4203-4215
[9]Chen S B,Donoho D L,Saunders M A.Atomic decomposition by basis pursuit[J].SIAM Journal on Scientific Computing,1998,20(1):33-61
[10]Donoho D L,Elad M,Temlyakov V N.Stable recovery of sparse overcomplete representations in the presence of noise[J].IEEE Transactions on Information Theory,2006,52(1):6-18
猜你喜欢
数学物理学报(2022年4期)2022-08-22
装备制造技术(2020年1期)2020-12-25
数学物理学报(2020年3期)2020-07-27
科技创新与应用(2020年6期)2020-02-29
制造技术与机床(2019年11期)2019-12-04
数学年刊A辑(中文版)(2018年2期)2019-01-08
中国交通信息化(2017年4期)2017-06-06
北京理工大学学报(2016年6期)2016-11-22
电视技术(2016年9期)2016-10-17
系统工程与电子技术(2016年7期)2016-08-21