
多轴越野车辆轴间刚度和阻尼的最优匹配
2014-07-19 11:03董明明
车辆与动力技术 2014年4期
董明明, 杨 猛
(北京理工大学 机械与车辆学院,北京 100081)
多轴越野车辆轴间刚度和阻尼的最优匹配
董明明, 杨 猛
(北京理工大学 机械与车辆学院,北京 100081)
为提高多轴越野车的行驶平顺性,建立了8×8越野车半车模型的六自由度动力学方程,求解对第一轴路面输入的传递函数.以提高行驶平顺性为目的确立目标函数,应用遗传算法对各轴间的悬架刚度和阻尼进行匹配优化,将优化前后的结果进行对比分析,优化后的悬架刚度和阻尼有效提高了多轴越野车辆的行驶平顺性.
多轴;平顺性;刚度;阻尼;优化
悬架的刚度和阻尼特性直接影响多轴越野车辆的平顺性.传统的悬架优化,只优化单个轮的最优刚度和阻尼,各轴的刚度和阻尼采用同样配置参数.优化多轴越野车辆的悬架轴间刚度和阻尼,可以成为改善轮式车辆的行驶平顺性的一个新途径.
2004年,埃及阿勒旺大学的S.M.EI-Demerdash和E.M. A. Rabeih分析并比较了四轴军用车辆和三轴车辆,二轴车辆的行驶平顺性与轮胎动载荷,从而得到了四轴车辆具有较好的行驶平顺和较小轮胎动载荷的结论[1].随后几年,国外对于多轴车辆的研究主要都是集中在其操纵稳定性,其中韩国汉阳大学的K Huh, J Kim和J Hong建立了6×6车辆的整车18自由度的模型,并利用MATLAB/SIMULINK工具分别在时域和频域对该车的操纵特性和驱动特性进行了分析[2].日本的防卫大学校K. Watanabe等人建立了8×8车辆转向时的数学模型,并对不同的转向策略进行了分析[3].2010年,西北工业大学和陕西汽车公司的方宗德等人应用ADAMS软件对8×4重型卡车的平顺性在频域内进行了分析,并对悬架刚度和阻尼进行了优化[4].
1 四轴车辆振动微分方程及频响函数
1.1 振动微分方程建立
汽车是一个复杂的系统,应根据所研究的问题进行简化,所建立的模型是四轴半车线性模型,模型基于假设简化后建立[5].四轴汽车的平面振动模型如图1所示.
图中:ms是簧上质量;mu1,mu2,mu3,mu4是簧下质量;k1,k2,k3,k4是各轴悬架刚度;c1,c2,c3,c4是各轴悬架阻尼;kt1,kt2,kt3,kt4是各轴轮胎刚度;q1,q2,q3,q4是路面激励;l1,l2,l3,l4是各轴到质心的距离,以质心为原点,前进方向为正;α是车身俯仰角;zc是车身质心垂直位移;z1,z2,z3,z4是簧下质量垂直位移.
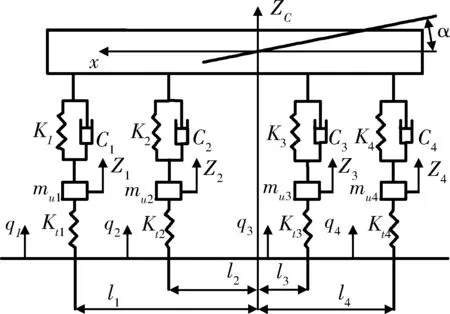
图1 四轴车辆双质量振动模型
动力学方程的矩阵形式为
(1)
(2)
(3)
(4)
,
(5)

(6)

(7)
1.2 频率响应函数
对式(1)等号两端进行傅里叶变换,整理可得
(8)
根据假设,车辆匀速行驶时,各轴间的路面输入存在以下关系
(9)


(10)
将四轴车辆系统对第一轴路面输入的频响函数写成如下向量的形式
(11)
2 汽车行驶平顺性的评价指标
2.1 汽车行驶平顺性主要评价指标
对于行驶平顺性,ISO2631—1:1997(E)标准规定[6],当振动波形峰值系数<9(峰值系数是加权加速度时间历程aw(t)的峰值与加权加速度均方根值aw的比值)时,用基本的评价方法—总加权加速度均方根值来评价振动对人体舒适和健康的影响.根据测量,各种汽车包括越野汽车,在正常行驶工况下对这一方法均适用.
车身垂直振动加速度均方根值是评价汽车平顺性的主要目标,车身垂直位移加速度功率谱为[7]
(12)
车身垂向加速度加权均方值为
(13)
车身角加速度功率谱为
(14)
车身角加速度加权均方值为[9]

(15)
2.2 汽车行驶平顺性辅助评价指标
在实际分析中,除采用主要评价指标外,还同时采用悬架动挠度均方根值和车轮相对动载均方根值作为辅助评价指标.
2.2.1 悬架弹簧动挠度
悬架系统动挠度对第一轴路面输入的频率响应函数为

(16)
悬架动挠度响应的功率谱为
(17)
因此,动挠度的均方值为

(18)
2.2.2 车轮相对动载荷
车轮相对动载荷对第一轴路面输入的频响函数为:

(19)
车轮相对动载荷响应的功率谱为

(20)
车轮相对动载荷的均方值为

(21)
3 悬架刚度阻尼优化
由于四轴车辆设计变量较多会使遗传算法陷入局部收敛,因此,先对悬架的刚度进行优化,再对悬架的阻尼进行匹配优化.
依据GB/T4970—2009选取D级路面,行驶车速为50km/h为仿真工况.表1为给定越野车辆的半车参数.

表1 某四轴军用车辆半车参数
3.1 约束的建立
(22)
由于是军用越野车辆,根据军用车辆过起伏路的要求,一般取动挠度的许用值为200 mm.

.
(23)
为保证汽车整体参数的变化不至于过大,此处增加两个约束.
①保证中性面的位置不变,即中性面距质心面距离.

(24)
②保证总刚度基本不变.
k=k1+k2+k3+k4.
(25)
3.2 目标函数的确定
选择座椅处垂直加速度,车身质心处垂直加速度,质心处角加速度和悬架动行程的均方根值作为平顺性的评价指标.
为了适应遗传算法的求解,需要采用罚函数法将约束问题转换为无约束问题,具体的目标函数可转化为[11]
(26)

3.3 悬架刚度优化
1)刚度变化的范围
优化时,各悬架的阻尼系数保持不变,考虑到弹簧的限程,为了使原底盘的固有频率变化不大,故以原始设计参数的1.1倍和0.9倍作为设计变量的上下限,轮胎保持现有设计参数.以该车现设计参数作为初始值.即各轴悬架刚度的变化范围为
127 092.87≤ki≤155 335.73

(27)
2)悬架刚度优化结果
将在工况为D级路面,行驶速度为50km/h对悬架刚度进行匹配优化,其遗传算法经过50代左右的进化,整体平均适应度趋于稳定,其悬架刚度优化结果如表2所示.
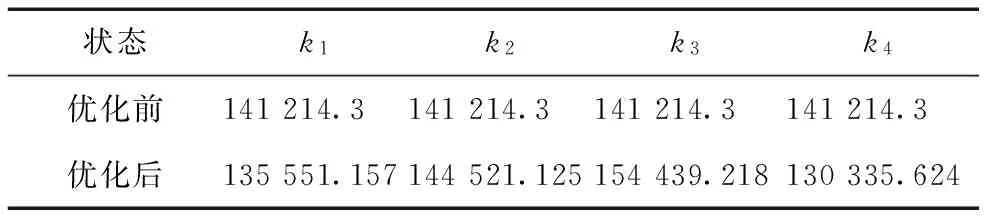
表2 悬架刚度优化结果 N/m
3.4 悬架阻尼优化
1)悬架阻尼变化范围
以四轴的阻尼系数为变量,将原始设计参数的1.1倍和0.9倍作为设计变量的上下限,轮胎保持现有设计参数.以该车原有设计参数和优化后的各轴刚度作为初始值,即各轴悬架阻尼系数的变化范围为
4715.55≤ci≤5763.45
(28)
2)悬架阻尼优化结果
表3应用遗传算法优化后得到各悬架的阻尼系数.
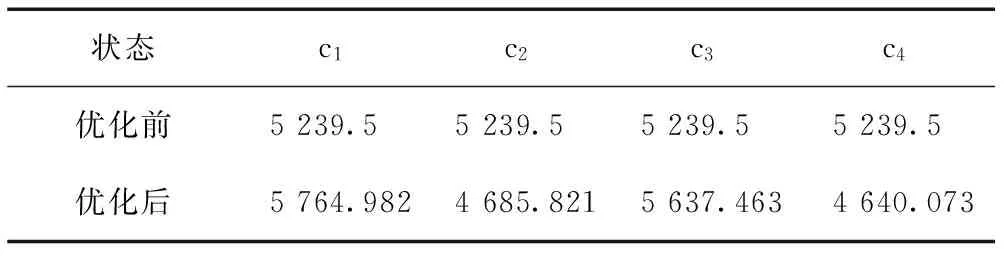
表3 悬架阻尼优化结果 Ns/m
3.5 优化结果对比分析
计算优化后各振动响应量的均方根值,将其与优化前的各响应量的均方根值进行比较,将计算结果列于表4中.
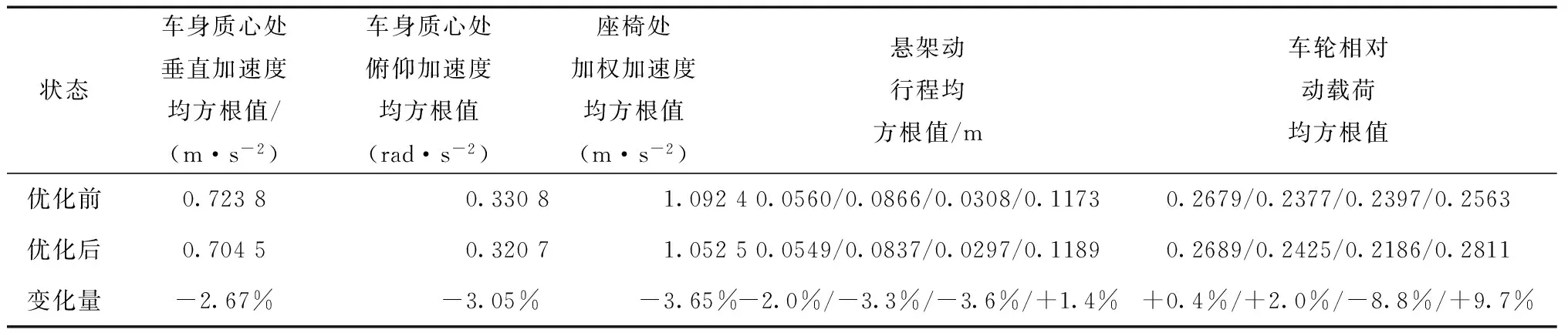
表4 优化前后各振动响应量的均方根值对比
从表4中可以看出,优化之后的给定车辆在D级路面,以50 km/h行驶时的座椅处的加速度均方根值减小了3.65%,车身质心处垂直方向加速度均方根值减小了2.67%,车身质心处俯仰角加速度均方根值减小了3.05%,第一轴、第二轴和第三轴悬架动行程均方根分别减小了2.0%,3.3%,3.6%.第四轴悬架动行程的均方根值增加了1.4%.第一轴、第二轴和第四轴的车轮相对动载荷均方根值分别增加了0.4%,2.0%,9.7%,第三轴车轮相对动载荷均方根值减小了8.8%.
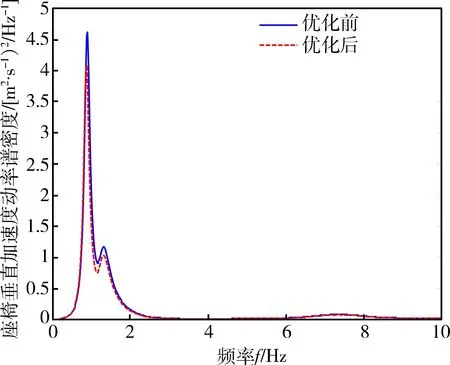
图2 优化前后座椅垂直加速度功率谱密度
图2为优化前后在D级路面,行驶速度为50km/h时的座椅垂直加速度功率谱密度对比图,从图中可以看到优化后座椅加速度功率谱密度的第一峰值有相应的降低.并且第一峰值的频率仍为1Hz左右,不在人体的第一共振区域内,由此说明此优化值是合理的.
4 结 论
通过优化,第一、四轴悬架刚度降低,第二、三轴悬架刚度增加,第一、三轴悬架阻尼增大,第二、四轴悬架阻尼减小.同时,第一、二、三轴悬架动行程均方根值减小.这将有效降低车辆行进间俯仰角度,从而提高行驶平顺性.计算得出的座椅处加速度均方根值及车身质心处的垂直方向和俯仰角加速度均方根值均得到降低,证明了优化的有效性.
优化后座椅处垂直加速度功率谱密度第一峰值有相应降低,有效提高了车辆行驶平顺性,优化方法合理有效.
[1] El-Demerdash S M, Rabeih E M A. Ride Performance Analysis of Multi-Axle Combat Vehicles[C]. SAE Automotive Dynamics, Stability & Controls Conference and Exhibition, 2004.
[2] Huh K, Kim J, Hong J. Handling and driving characteristics for six-wheeled vehicles[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering,2000,214(2):159-170.
[3] Watanabe K, Yamakawa J, Tanaka M, et al. Turning characteristics of multi-axle vehicles[J]. Journal of Terramechanics,2007,44(1): 81-87.
[4] Hui Pang, Li H Y, Fang Z D,et al. Ride comfort optimization and test research on an 8×4 heavy truck[J]. noise & vibration worldwide,2010,41(10): 65-71.
[5] 陈 欣, 祁 涛,李栓成,等. 高机动性车辆越野平顺性分析方法研究[J]. 汽车工程,2008,30(9):735-741.
[6] International Standard Organization.ISO2631-1:1997(E).Mechanical vibration and shock-Evaluation of human exposare to whole-body vibration-Part:General requirements[S].北京:中国标准出版社.2007.
[7] 张立军, 何 辉. 车辆行驶动力学理论及应用[M]. 北京: 国防工业出版社,2011.
[8] 中国国家标准化管理委员会.GB/T7031-2005机械振动道路路面谱测量数据报告[S]. 北京:中国标准出版社,2006.
[9] 李晓雷,俞德孚,孙逢春. 机械振动基础[M]. 北京: 北京理工大学出版社,2010.
[10]李 杰, 东华军, 哈兰涛. 遗传算法及在汽车悬架参数优化设计中的应用[J]. 汽车技术, 2006(6): 18-21.
[11]赵 旗, 车华军, 李 杰.基于遗传算法的汽车行驶平顺性优化仿真[J]. 机械设计与制造, 2009(3): 203-205.
Axial stiffness and Damping Optimal Matching of Multi-axle Off-road Vehicles
DONG Ming-ming, YANG Meng
(School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, China)
In order to improve the ride comfort of a multi-axle off-road vehicle, a six-degrees of freedom dynamic model for an 8×8 off-road vehicle is built to solve the transfer functions of the road input of its first axle. The objective function is established to improve the ride comfort and the genetic algorithm is used for the matching optimization of stiffness and damping among each axle. The comparison of results before and after the improvement shows that the suspension with optimized parameters can effectively improve the ride comfort of the vehicle.
Multi-axle; Ride comfort; Stiffness; Damping; Optimization
1009-4687(2014)03-0040-05
2014-10-11
董明明(1975 - ),男,副教授,研究方向为车辆动力学、悬架及其部件设计、振动与噪声控制.
U462.3
A
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
机械设计与制造(2022年5期)2022-05-19
北京航空航天大学学报(2021年4期)2021-11-24
装备制造技术(2020年2期)2020-12-14
汽车零部件(2019年10期)2019-11-13
今日农业(2019年12期)2019-08-15
航天器工程(2014年5期)2014-03-11
空气动力学学报(2013年2期)2013-10-21
汽车与新动力(2012年5期)2012-03-25
振动与冲击(2011年10期)2011-09-17
