坐标变换并行软切换盲均衡算法及其DSP实现
2014-07-25 09:19郭业才吴彬彬张冰龙
数据采集与处理 2014年2期
郭业才 吴彬彬 张冰龙
(1.南京信息工程大学江苏省气象探测与信息处理重点实验室,南京,210044;2.南京信息工程大学电子与信息工程学院,南京,210044;3.南京信息工程大学江苏省气象传感网技术工程中心,南京,210044)
引 言
由于盲均衡技术能有效节省信道带宽、抑制码间干扰、提高通信质量,而受到越来越多关注。在盲均衡技术中,超指数迭代常模盲均衡算法(Super-exponential iteration,SEI)[1-2]收敛速度快,但稳态误差大;而SEI结合判决引导(Decision directed,DD)硬切换双模式常模盲均衡算法[3-4]先由收敛能力强的SEI算法作冷启动,当判决错误率达到足够低的水平时,切换到DD算法,虽能降低稳态误差,但需要设置切换门限。无论是SEI或SEI+DD常模盲均衡算法在均衡高阶QAM信号时,剩余误差较大甚至失效,主要原因在于它们对相位不敏感。高阶QAM信号不仅含有幅度信息,而且含有相位信息,当它通过畸变信道时会产生相位旋转,引起较大的误判。为了有效均衡高阶QAM信号,文献[5]给出了一种基于坐标变换的盲均衡算法,该算法的基本思路在于利用坐标变换将高阶多模QAM信号变换为常模4QAM信号,然后再对变换后的高阶QAM信号进行均衡,均衡效果明显,但收敛速度不够快。
本文利用SEI盲均衡算法、DD算法及坐标变换盲均衡算法的优点[6-11],提出一种坐标变换超指数迭代并行软切换(Coordinate transoformation SEI-DD,CTSEI-DD)盲均衡算法,并在MATLAB仿真基础上,由DSP实现并获得较好效果。
1 变换坐标超指数迭代盲均衡算法
1.1 坐标变换原理
以16QAM为例,16QAM 的星座坐标为{±1±i,±1±3i,±3±i,±3±3i},分布在4个半径相同的圆上,各个圆的圆心坐标为{2+2i,-2+2i,-2-2i,2-2i},如图1所示。将输入信号按箭头调整,坐标变换为{1+i,-1+i,-1-i,1-i}。
设信号的原始坐标为x,新坐标为y,坐标变换公式为

式中:xr和xi分别为x的实部和虚部;sgn为符号函数。16QAM信号星座坐标变换前后对比,如表1所示。

图1 16QAM坐标变换图Fig.1 Coordinate transformation of 16QAM signals

表1 16QAM坐标变换表Table 1 Comparison of 16QAM signals′coordinate transformations
1.2 坐标变换超指数迭代盲均衡算法
基于坐标变换的常数模盲均衡算法[5]是利用坐标变换将多模16QAM信号变换为常模4QAM信号,再进行盲均衡,取得了良好的均衡效果,但收敛速度不够快。为了获得收敛速度快、均方误差小,且适合于均衡高阶QAM信号的盲均衡算法,现将坐标变换原理与SEI盲均衡算法相结合,得到坐标变换超指数迭代盲均衡算法。该算法的迭代式为

式中:μ为迭代步长;fCISEI(k)为CTSEI的权向量;yCISEI(k)与eCISEI(k)分别是对均衡器输出信号y(k)和误差函数e(k)进行坐标变换后的结果,且
式(2)中Q(k)为白化矩阵,对数据起到白化作用,用以加快速收敛速度,其迭代公式为
式中μQ为Q(k)的迭代步长。式(2~6)构成了CTSEI盲均衡算法。
2 坐标变换并行软切换盲均衡算法
为了避免SEI+DD硬切换需要设置误差门限的缺陷,现将CTSEI和DD以软切换方式相结合,得到CTSEI-DD盲均衡算法,该算法通过CTSEI与DD算法之间的软链接方式实现,原理如图2所示。
图2中:a(k)为发射端发送的原始信号;c(k)为信道的冲击响应;n(k)为加性高斯白噪声;x(k)为均衡器输入信号;f(k)为均衡器权向量且长度为2N+1(N为整数);均衡器为长度为N的横向滤波器,ψ(·)为误差函数e(k)的生成函数,eDD(k)为判决引导误差项;y(k)为均衡器输出;(k)为量化判决后对信号的估计。在CTSEI-DD算法中
式中:fCISEI(k)为 CTSEI部分权向量;fDD(k)为DD部分权向量,都采用随机梯度法最小化代价函数得到。即
CTSEI部分权向量迭代公式为

式中μC为CTSEI的步长。
DD部分权向量迭代公式为

式中μD为DD的步长,(k)为(k)的判决输出,且


3 MATLAB仿真与DSP实现
为了检验CTSEI-DD算法的性能,以CTSEI算法与 MSEI算法[12]为比较对象,进行仿真与实现研究。首先利用MATLAB仿真获取CTSEIDD算法性能最佳时的相关参数,再利用所获参数进行DSP实现。
3.1 MATLAB仿真
混合相位水声信道脉冲响应为c= [0.313 2 -0.104 0 0.890 8 0.313 4]。发射信号为16QAM信号,取8 000个点,信噪比为25dB,均衡器权长16,权向量中心抽头初始化。当MSEI算法、CTSEI算法和CTSEI-DD算法的步长μMSEI,μCISEI,μCTSEI-DD分别为 0.000 3,0.002,0.000 8,DD算法的步长μDD为0.003时,100次蒙特卡洛仿真结果表明了CTSEI-DD算法的性能最佳。在上述参数下,MATLAB仿真结果表明,CTSEI-DD算法具有最快的收敛速度、最小的均方误差,星座图最为清晰、紧凑。
3.2 DSP实现
DSP是高速信号处理器芯片,应用广泛[13-14]。为了用DSP芯片实现CTSEI-DD算法,本文选用美国TI公司的TMS320C5509芯片,该芯片低功耗、定点运算、速度达100MIPS,能满足实时处理的要求。由TMS320C5509设计的均衡器硬件结构,如图3所示。图中,SDRAM是同步动态存储器,通过CPLD扩展DSP引脚与SDRAM连接,利用单一系统时钟同步所有的地址数据和控制信号,且DSP通过CPLD与D/A数模转换连接,将处理后的数据实时显示在示波器上。HPI是一种并行接口总线,外部主处理器通过它可以直接访问5509的片上存储器,但不能访问CPU寄存器、片上寄存器和片上存储器。HPI是上位机和5509并行通讯的接口,通过HPI,外部处理器可以方便地与5509接口,交换数据。

图3 硬件框图Fig.3 Hardware block diagram
DSP实现CTSEI-DD算法主要分两部分:先在CCS中用C语言编写算法代码,编写配置文件,测试算法的可行性。软件流程如图4,5所示。

图4 主流程图Fig.4 Main flow chart

图5 CTSEI-DD算法流程图Fig.5 Flow chart of CTSEI-DD algorithm
用DSP实现CTSEI-DD算法时,通过JTAG仿真器将DSP与主机相连,在主机上运行CCS进行实时观测均衡器输出。实验中需要数据时,通过MATLAB导入,但TMS320C5509是16位定点型DSP,而均衡器的输入信号16QAM是浮点数据,所以,在数据进入均衡器处理前,需要对数据进行定标处理;然后,将该数据由CCS的探针导入到SDRAM中,通过SDRAM对DSP进行读写操作,直到数据处理完毕。由DSP实现的盲均衡算法输出及误差收敛曲线,如图6所示。
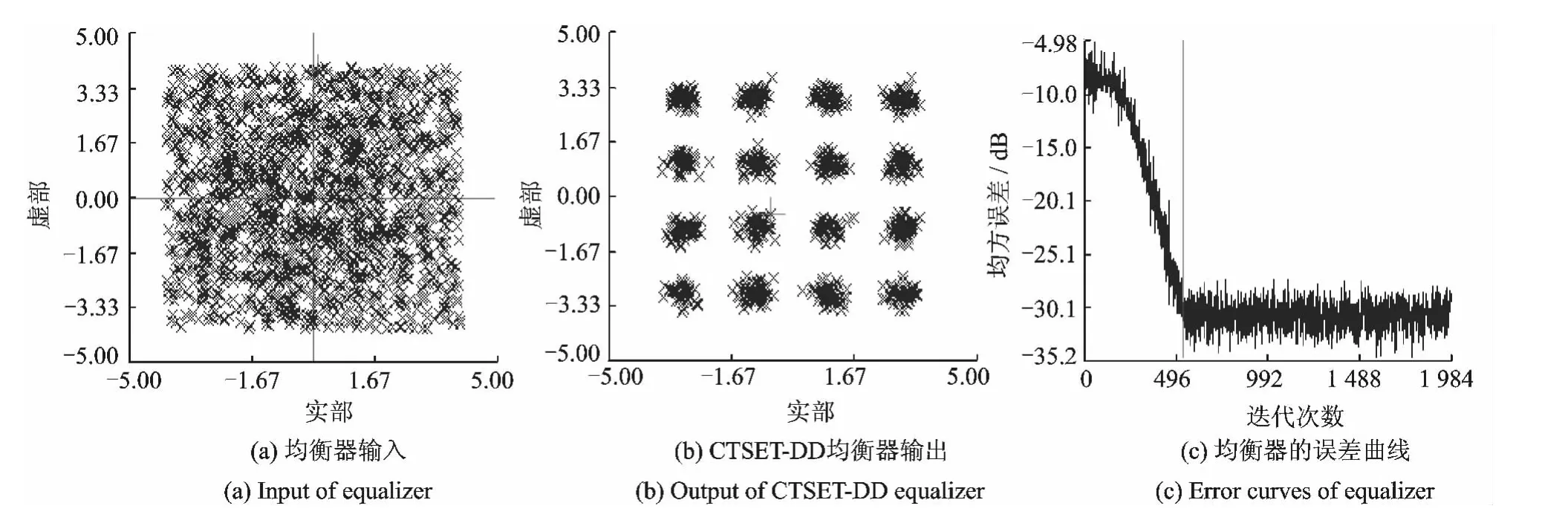
图6 DSP实现的结果Fig.6 DSP implementation results of CTSEI-DD equalizer
图6表明,CTSEI-DD算法的DSP实现后,CTSEI-DD算法的输出星座张开清晰、紧凑;均方误差在迭代500余次就收敛,而收敛后的均方误差能达到-30dB,但收敛后均方误差的波动性较大,其原因可能为在CCS环境中只做了64次蒙特卡洛仿实验,实验次数偏少所致。实验结果表明,用DSP芯片实现CTSEI-DD算法是完全可行的。
4 结束语
本文提出了CTSEI-DD盲均衡算法,并在MATLAB仿真基础上,选用TMS320C5509芯片实现了CTSEI-DD算法。CTSEI-DD的DSP实现结果表明,该算法对高阶QAM信号进行均衡是有效的,用DSP实现该算法的方法是可行的。
[1] Shalvi O,Weinstein E.Super-exponential methods for blind equalization[J].IEEE Trans Inform Theory,1993,39(2):505-519.
[2] Guo Y C,Zhao X Q.Coordinate transformation based super-exponential iterative blind equalization algorithm[C]∥2010Second Pacific-Asia Conference on Circuits,Communications and System (PACCS).Beijing:Institute of Electrical and Electronics Engineers,2010:125-128.
[3] 李晓波,樊养余.一种含软判决引导的超指数迭代盲均衡算法[J].测控技术.2013,32(8):149-151.
Li xiaobo,Fan Yangyu.A super exponential iterative blind equalization algorithm based on soft decision directed[J].Measurement and Control Technology,2013,32(8):149-151.
[4] 宁小玲,李启元,段立.适用于 QAM 信号的方形判决超指数迭代盲均衡算法[J].声学技术,2013,32(1):59-63.
Ning Xiaoling,Li Qiyuan,Duan Li.Square contour decision-based super-exponential iteration blind equalization for QAM signals[J].Technical Acoustics,2013,32(1):59-63.
[5] 饶伟,郭业才,汪胜前,等.基于坐标变换的常数模盲均衡新算法[J].电子学报,2011,39(1):7-12.
Rao Wei,Guo Yecai,Wang Shengqian,et al.New constant modulus algorithm for blind equalization based on coordinate transformation[J].Acta Electronica Sinica,2011,39(1):7-12.
[6] Ning Xiaoling,Liu Zhong,Liu Zhikun,et al.New super-exponential iteration blind equalization algorithm for underwater acoustic communications[C]∥2011International Conference on Image Analysis and Signal Processing(IASP).Hubei:IEEE Press,2011:468-473.
[7] Li Jinming,Lu Jing.A modified super-exponential algorithm for joint blind equalization and carrier recovery[C]∥Electronics,Communications and Control(ICECC),2011International Conference on.Ningbo:IEEE Press,2011:2437-2440.
[8] Zhang Pu,Yi Jin,He Sailing.Inverse transformation optics and reflection analysis for two-dimensional finite-embedded coordinate transformation[J].IEEE Journal of Selected Topics in Quantum Electronics,2010,16(2):427-432.
[9] Yang Rui,Tang Wenxuan,Yang Hao,et al.A coordinate transformation-based broadband flat lens via microstrip array[J].IEEE Antennas and Wireless Propagation Letters,2011,10(4):99-102.
[10]Kwon Do-Hoon,Emiroglu C D.Low-profile embedded design of endfire scanning arrays with coordinate transformations[J].Journal of Applied Physics,2010,107(3):034508.1-034508.8.
[11]郭业才,杨超.基于正交小波变换的超指数迭代联合盲均衡算法[J].数据采集与处理,2010,25(1):13-17.
Guo Yecai,Yang Chao.New combined super-exponential iteration blind equalization algorithm based on orthogonal wavelet transform[J].Journal of Data Acquisition and Processing,2010,25(1):13-17.
[12]丁雪洁,刘纪元,黄海宁.一种新型频域快速盲分离算法[J].数据采集与处理,2013,28(3):261-267.
Ding Xuejie,Liu Jiyuan,Huang Haining.Novel fast blind source separation algorithm in frequency domain[J].Journal of Data Acquisition and Processing,2013,28(3):261-267.
[13]管庆,朱海,王凯,等.基于TMS320DM8168的视频监控跟踪系统[J].数据采集与处理,2012,27(6):652-658.
Guan Qing,Zhu Hai,Wang Kai,et al.Video surveillance tracking system based on TMS320DM8168[J].Journal of Data Acquisition and Processing,2012,27(6):652-658.
[14]刘朝晨,吴强,殷超.一种基于TMS320C6713的语音信号频域盲分离算法[J].数据采集与处理,2012,27(6):646-652.
Liu Zhaochen,Wu Qiang,Yin Chao,et al.Blind speech separation in frequency domain based on TMS320C6713DSK[J].Journal of Data Acquisition and Processing,2012,27(6):646-652.
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17
数学物理学报(2021年1期)2021-03-29
数学物理学报(2020年6期)2021-01-14
哈尔滨轴承(2020年1期)2020-11-03
今日中国·法文版(2020年7期)2020-07-04
数学物理学报(2018年5期)2018-11-16
电子器件(2015年5期)2015-12-29
电源技术(2015年1期)2015-08-22
电力建设(2015年2期)2015-07-12
深圳大学学报(理工版)(2015年5期)2015-02-28