基布横动式Z 字型织草装置的研制及摆幅分析*
2014-08-16 07:58游东东刘鹏
华南理工大学学报(自然科学版) 2014年1期
游东东 刘鹏
(华南理工大学 机械与汽车工程学院,广东 广州 510640)
近年来,随着人造草坪的快速发展,有关人造草坪的研究逐步得到重视[1-3].人造草坪的主要生产设备是人造草坪织机(简称织草机),属于地毯簇绒机[4].传统织草方式对应的草簇在基布上的横纵向分布不均匀,导致基布上针孔的分布不均匀,使得人造草坪基布横向拉断力较低.为此,国内外一些企业推出了Z 字型的草型产品,但目前的Z 字型织草技术仍处于起步阶段,Z 字型摆幅及设备实现形式等对草坪质量、成本及效率的综合影响并没有得到系统深入的研究.因此,相关工艺及设备的设计缺乏理论依据.在设备方面,Z 字形织草技术的实现可借鉴地毯簇绒机横动提花技术的原理,有横动基布式和横动针床式[5-7]两种.目前国内在横动针床式地毯提花技术方面已有一些研究,张少平等[8]研究了地毯簇绒花型与横动凸轮设计之间的数学关系,为凸轮的分析和数控制造提供数据.阮岑等[9]对机械凸轮提花和电子凸轮横动系统进行了设计,对针床横动技术做了细致研究.而国外进口设备中,Z 字型人造草坪的成形原理采用的是横动基布式[10].
为实现摆幅可调的Z 字型织草,文中提出了一种偏心轮式基布横动装置,并结合虚拟样机[11-13]及运动仿真技术[14-15]进行建模仿真,验证机构的可靠性和有效性,最后通过基布拉伸试验研究了Z 字型摆幅对人造草坪基布承载能力的影响.
1 基布横动装置方案
在传统直线型织草机中,基布沿图1 所示的Y轴方向进给.为实现Z 字型织草技术,文中综合考虑方案的可行性、经济性,在传统织草机上增加一套基布横动装置,采用无偏心距的对心曲柄滑块机构(主要由横动光轴、直线帯座轴承、转臂、偏心圆盘组成)来实现主要动作,其主要功能是使基布在沿Y轴方向进给的同时,还能沿X 轴方向(横向)做往复摆动,且在摆动周期上与原主轴系统精确配合,以生产出规则大小统一的Z 字型人造草坪.该装置的动力由主轴通过同步带传入圆锥齿轮转向箱(简称转向箱),驱动偏心圆盘转动,通过转臂驱动横动光轴和横动针辊,沿直线帯座轴承的轴线做往复移动.同步带轮与转向箱的传动比分别为2∶1 和1∶1,即当横动针辊完成半个周期的横向摆动时,钩、刀、针完成一个运动周期的配合.横动针辊调高部件和偏心部件为此传动装置的关键部件.图2 为图1 中关键部件的详图.横动针辊调高部件可通过连接螺栓在长孔位置的调整来达到调节横动针辊高度的目的.偏心圆盘为偏心部件的主要零件,内设T 型槽,通过内六角螺钉调整T 型滑块在T 型槽内的位置可实现传动装置偏心距的调整.

图1 整机中的基布横动装置Fig.1 Base fabric traverse device in the machine
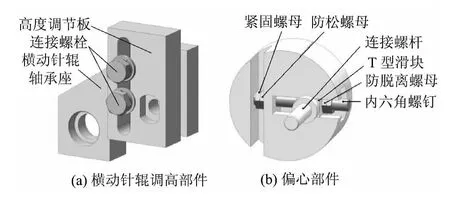
图2 关键部件详图Fig.2 Detail view of key components
此外,横动针辊一端装有一对向心轴承,使其在往复移动的同时能跟随底布不断自转,通过针辊表面均匀分布的钢针(直径为1.6 mm)不断地扎入基布来带动基布在进给时随针辊横向运动.
2 Z 字型摆幅的调整
目前市场上Z 字型草坪的摆幅大小不一,且摆幅均小于行距的1/2.为研究Z 字形摆幅大小对草坪质量的影响,文中设计了如下两种方案来实现Z字型摆幅的调整:
(1)利用曲柄滑块传动原理调整偏心部件的偏心距,进而调整横动针辊在X 轴方向的最大摆幅,增加基布的整体摆动幅度.
(2)在最大摆幅不变的情况下,即偏心距固定时,通过调整同步带调节主轴系统与基布横动装置时间上的配合关系(即调整针扎入基布时,针与横动针辊的相对位置关系),调节Z 字型摆幅大小.其原理如图3 所示,分析中假设基布长度为同一偏心距下Z 字型的最大摆幅,且基布相对于机台静止,针沿X 轴方向摆动.图3 中针有两个运动周期,从针尖下行刚刚接触基布时开始计时,实线区域为第1个周期,虚线区域为第2 个周期,箭头为针在X轴方向的摆动方向.由图3 分析可知,两针之间X 轴方向的距离即为Z 字型对应的横向摆幅.当针下行针尖刚刚接触到基布时,若针处于其摆幅的中间位置,则Z 字型摆幅为0(第1 针的位置与第2 针的位置在水平方向上重合),见图3(a),此情况表明配合关系调整不当可直接使摆幅为0;若针处于其摆幅两端的极限位置,则Z 字型摆幅达到最大,见图3(b);若针处于除以上情况之外的非特殊位置时,也将出现Z 字型摆幅,但其摆幅要小于最大摆幅,如图3(c)所示.

图3 同偏心距下的配合分析Fig.3 Coordination analysis under the same eccentric distance
3 运动仿真及实验验证
织草机的织草过程要求刀、钩在整个成形过程均保持贴合状态,针向下运动到最低点返程时,钩嘴必须能勾住针孔上的草线,这三者的相对运动方式固定,故为了研究Z 字型织草传动系统与原主轴系统的相对运动关系,只需研究针与横动针辊之间的相对运动关系.
运动仿真模型如图4(a)所示,其机构运动简图如图4(b)所示.其中,针轴转臂与主轴的偏心距为40.5 mm,工作尺寸为250.0 mm,针轴转臂的工作尺寸为153.5 mm,针梁转臂的工作尺寸为125.0 mm,针梁连杆的工作尺寸为128.5 mm.采用Solidworks中的Motion 模块对虚拟样机模型进行运动仿真.主要运动参数设定如下:主轴到偏心圆盘的传动比为2∶1,主轴转速为60 r/min,偏心圆盘的偏心距为33 mm,并在运动算例中检验部件的动态干涉.
以支撑架上表面为基准面并假定其与托布叉共面,取针床上针尖一点,提取针尖在Z 轴方向上的位移(S1)数据,同时在针辊上任取一点,以转向箱端面为基准,提取针辊在X 轴方向上的位移(S2)数据,结果如图5 所示.测得横动针辊行程为66mm,并且其周期是针床周期的2 倍,满足设计要求.在时间t=1 s时,针的位移为0 mm(此时针自上向下运动,针尖刚到达托布叉),针辊位移为536 mm,处于两边的极限位置,即摆幅达到最大效果.

图4 运动仿真模型及机构运动简图Fig.4 Motion simulation model and kinematic diagram of mechanism

图5 运动仿真结果Fig.5 Simulation results of motion
针对上述提出的基布横动装置,文中研制相应设备并进行空机运行实验.实验测量横动针辊摆幅之前,首先降低织草机的工作频率,以降低主轴的运转速度和横动针辊的摆动频率,便于实验结果的测量;实验时,将铅笔笔身一直紧贴横动针辊端面,通过铅笔笔尖下的记录纸,记录横动针辊来回运动的摆幅.实验测得摆幅结果为70 mm,与仿真结果基本吻合,摆幅值略偏大,主要是由于铅笔笔尖与记录纸之间存在摩擦力,运动时的横动针辊端面贴合出现夹角间隙以及偏心轮偏心距存在误差.
4 Z 字型的基布拉伸试验
基布拉伸试验采用的草线规格为8000D,橄榄型截面,草簇行距为19 mm(3/4 英寸),试验试样中包括两层基布,如图6(a)所示.试验在恒宇仪器-电脑伺服力能材料试验机(见图6(b))上进行.

图6 基布拉伸试验简介Fig.6 Test introduction of tensile base fabric
为研究不同摆幅对基布拉断失效力的影响,将试验基布根据其所属基布层数和摆幅大小按编号分为8 块,具体分类指标如表1 所示,其中摆幅大小的公差为0.2 mm,无摆幅(摆幅为0)基布即为传统直线型人造草型对应的基布.

表1 试验用基布编号1)Table 1 Base fabric number used in test
表1 中的试验基布均为长18.0 mm、宽7.5 mm的长方形边缘无针孔的样品,夹具对其拉伸方向与单针走针方向一致,且拉伸中夹持两个针孔的长度,并保证夹具边缘避开基布的孔,以免基布在被夹持的根部断裂.设定测试前的预紧速度为30 mm/min,预紧力为0.1 N.控制模式为定速度(250 mm/min)拉伸,断点判定参数采用绝对荷重衰减.试验前后直线型与Z 字型的基布形态比较如图7 所示.
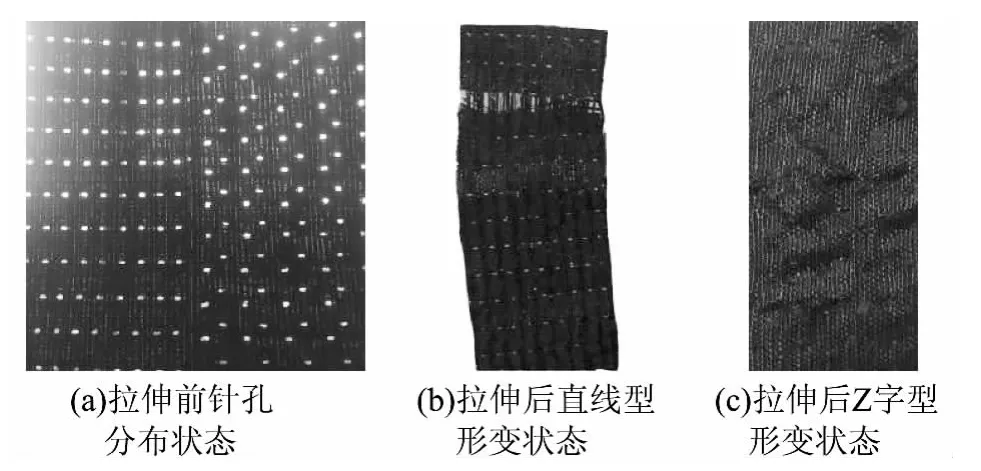
图7 拉伸试验前后直线型与Z 字型的基布形态比较Fig.7 Comparison of base fabric shape between line-shaped and Z-shaped before and after tensile test
从图7(a)可知,Z 字型基布能显著改善基布针孔分布的均匀程度.当直线型基布受拉失效时,基布上留下了显著的断裂痕迹(见图7(b));而Z 字型基布受拉失效后,样品整体起褶皱,受破坏情况均匀,无断裂破坏现象(见图7(c)).

图8 基布的变形失效对比Fig.8 Comparison of base fabric deformation
8 块基布试样的变形失效(拉伸力F 与时间的关系)对比如图8 所示.由图可知,Z 字型样品基布的最大拉伸力均大于无摆幅的直线型基布,基布3、7 的承载能力相对最好.在第1 层基布中,基布3 的最大拉伸力为891N,与基布1 的629N 相比,提升了41.7%;在第2 层基布中,基布7 的最大拉伸力为1009 N,与基布5 的637 N 相比,提升了58.4%.从图8 还可以得出:过大的Z 字型摆幅(基布4、8)并不能提高基布的最大拉伸力,且摆幅越大,对应的基布背草面用草线越多,成本越高,因此对于行距为19 mm(3/4 英寸)的人造草坪,当Z 字型摆幅约为6.3mm,即为人造草坪行距的一半时,基布的承载能力最好,且成本合理.
5 结论
文中研制了一种基布横动装置,即在传统生产方式的基础上,添加新动作,以实现Z 字型人造草坪成形技术;然后基于虚拟样机技术,用Solidworks软件建立了织草机的三维模型,并针对主要研究对象对虚拟样机模型进行运动仿真,通过空机运行实验验证了运动仿真结果.
文中提出了两种调整Z 字型摆幅的方案,并对横动针辊固定摆幅下基布横动机构与原主轴系统的运动配合关系进行研究,考察Z 字型技术对基布抗拉性能的影响.结果表明:运动配合关系对Z 字型摆幅大小起决定性作用;Z 字型技术可提升基布的横向抗拉能力,且Z 字型摆幅大小对基布承载能力的影响较大,摆幅一般不应大于行距的一半,当摆幅约为行距的一半时,基布的承载能力最好.
[1]包永霞,满达,李聪,等.天然草与人造草混合系统草坪运动质量性状研究[J].草地学报,2012,20(1):37-41.Bao Yong-xia,Man Da,Li Cong,et al.Researches on the sport quality of natural-artificial turf [J].Acta Agrestia Sinica,2012,20(1):37-41.
[2]Ball Kevin,Hrysomallis Con.Synthetic grass cricket pitches and ball bounce characteristics[J].Journal of Science and Medicine in Sport,2012,15(3):272-276.
[3]Kolgjini B,Schoukens G,Kiekens P.Influence of stretching on the resilience of LLDPE monofilaments for application in artificial turf [J].Journal of Applied Polymer Science,2012,124(5):4081-4089.
[4]Toshiyasu Kinari.Weaving machinery and its relatedtechnologies [J].Journal of Textile Engineering,2007,53(2):43-52.
[5]Jr Hyatt Richard G,Trent Douglas E.Electronic cam assembly:United States,US6209367 B1[P].2001-04-03.
[6]Omron Corporation.Method of controlling electronic cam and servo motor control system:Japan,EP20050024936[P].2006-05-24.
[7]Christman W M,Jr Hall W.System and method for forming tufted patterns:United States,US7634326 B2 [P].2009-12-15.
[8]张少平,丁彩红,孙以泽.基于Matlab 的地毯簇绒机横动等径凸轮设计[J].东华大学学报:自然科学版,2007,33(5):629-632.Zhang Shao-ping,Ding Cai-hong,Sun Yi-ze.Design of transverse movable conjugate yoke radial cam of tufting carpet machine based on Matlab[J].Journal of Donghua University:Natural Science,2007,33(5):629-632.
[9]阮岑,孟婥,杨延竹.地毯簇绒装备横动提花方法的研究[J].机械设计与制造,2008(12):124-126.Ruan Cen,Meng Chuo,Yang Yan-zhu.Study on pattern transverse motion controlling system of tufting machine[J].Machinery Design & Manufacture,2008(12):124-126.
[10]Cobble International Corporation.Cobble tufting machine service manual [M].California:Cobble International Corporation,2011:31-33.
[11]程杭杭.地毯簇绒机簇绒针传动机构动力学分析[J].制造业自动化,2012,34(6):117-119.Cheng Hang-hang.Dynamical analysis of drive mechanism within a carpet tufting machine[J].Manufacturing Automation,2012,34(6):117-119.
[12]Ji Liang,Chen Degui,Liu Yingyi,et al.Analysis and improvement of linkage transfer position for the operating mechanism of MCCB[J].IEEE Transactions on Power Delivery,2011,26(1):222-227.
[13]Son Hungsun,Choi Hae-Jin,Park Hyung Wook.Design and dynamic analysis of an arch-type desktop reconfigurable machine [J].International Journal of Machine Tools & Manufacture,2010,50(6):575-584.
[14]田志祥,吴洪涛.闭环双臂空间机器人的动力学建模与仿真[J].华南理工大学学报:自然科学版,2011,39(8):42-47.Tian Zhi-xiang,Wu Hong-tao.Dynamic modeling and simulation of closed-loop dual-arm space robots [J].Journal of South China University of Technology:Natural Science Edition,2011,39(8):42-47.
[15]Chang Kuang-hua.Computer-aided modeling and simulation for recreational waterslides [J].Mechanics Based Design of Structures and Machines,2007,35(3):229-243.
猜你喜欢
发明与创新(2022年24期)2022-06-14
历史教学问题(2021年3期)2021-12-20
卷宗(2019年18期)2019-07-11
制造技术与机床(2018年9期)2018-09-19
科技创新与应用(2016年8期)2016-10-21
新疆农垦科技(2016年2期)2016-08-21
新疆农垦科技(2016年2期)2016-08-21
中国机械工程(2015年13期)2015-12-16
21世纪商业评论(2015年5期)2015-09-10
云南师范大学学报(自然科学版)(2015年3期)2015-02-13