感应电机驱动系统的离散域电流调节器分析和设计
2014-09-22 09:12,,,
电气传动 2014年7期
,,,
(上海大学机电工程与自动化学院,上海 200072)
在按磁链定向的感应电机矢量控制系统中,电流环作为内环其特性很大程度上决定了系统的运行性能,因此电流调节器的设计显得尤为重要。传统的同步坐标系PI电流调节器由于具有在较宽的频率范围内调节信号的能力且实现简单,成为感应电机电流调节器的普遍标准[1]。然而由于在同步参考坐标系中电机dq轴存在交叉耦合,其大小与同步角频率成正比,当系统运行在高速条件下时该耦合会降低PI电流调节器的效果。
同步坐标系复矢量电流调节器采用将调节器的复数零点与电机复数极点进行对消的设计方法,能够实现在宽速范围内耦合项的解耦,具有较低的参数敏感性,因此受到了广泛关注并越来越多的被使用[2-3]。
然而无论使用何种电流调节器,在感应电机数字控制系统中普遍的实现方法为在连续时间域内对调节器进行分析设计并在随后变换到离散域中。当电机的运行频率较高时,受数字系统控制延迟的影响会使离散后调节器的特性偏离连续域模型,从而导致系统的性能受到影响[4]。
文献[5]详细介绍了在连续域内矢量控制系统PI调节器的参数整定。文献[6-7]基于系统开关频率较低的应用场合,给出了离散域内复矢量电流调节器的设计,降低了在控制延迟较大时dq轴耦合作用的影响,提高了系统的可控性。文献[8]着重分析了感应电机在高速条件下离散电流调节器的设计,但缺少必要的验证结果和对比。
本文建立了在离散域内感应电机的模型,针对电机高速运行的场合,分析了系统采用同步坐标系PI电流调节器与复矢量电流调节器的性能,对比引入了直接离散复矢量电流调节器的设计方法,通过在离散域内直接设计调节器的零点与电机模型的极点对消,使电流环在离散域的特性不受电机转速影响,保证了系统在宽速范围内稳定运行,仿真与实验结果证明了该设计方法的优越性和有效性。
1 感应电机的离散域模型
在按转子磁链定向的同步参考坐标系中,感应电机方程可以表示为
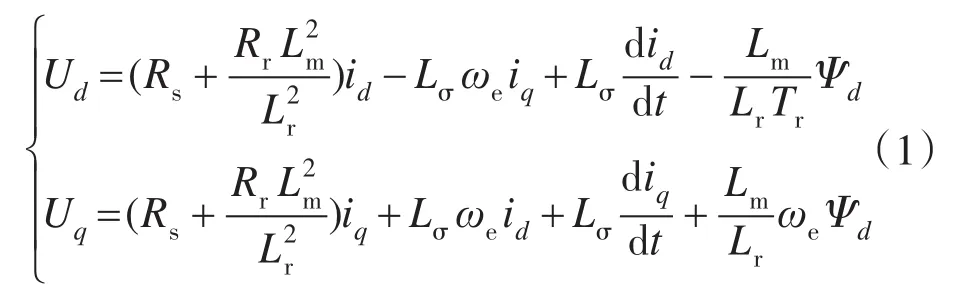
式中:Rs为定子电阻;Rr为转子电阻;Lr为转子电感;Lm为互感;Lσ为漏感;ωe为同步角频率;Ψd为转子磁链d轴分量。
可以看出式(1)中存在两种耦合项:来自同步坐标系的交叉耦合与来自反电动势的耦合,两种耦合的大小都和电机的同步角频率密切相关,若能消除或降低这两种耦合的影响,便能够使电机电压方程转换成一个近似RL负载的方程从而实现快速、准确的电流调节[2-3]。
由于采用复矢量的概念(fdq=fd+j∙fq)可以将感应电机模型由一个多输入/多输出的系统简化为一个等价的单输入/单输出的复矢量系统,从而为系统性能的分析提供便利,因此图1给出了电机连续域内的复矢量状态框图,其中Edq为反电动势项
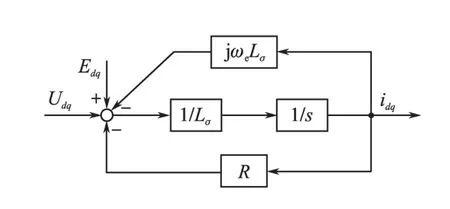
图1 同步坐标系下感应电机的复矢量模型Fig.1 Complex vector model of induction motor in synchronous frame
当对反电动势进行前馈解耦,同时令R=则感应电机复矢量方程可以简化成如下形式:

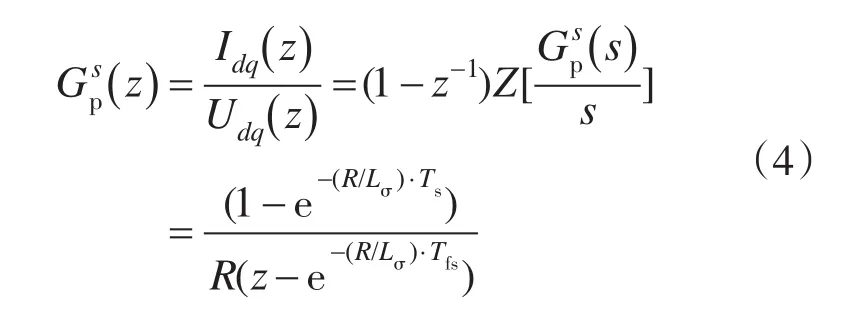
可以看出,通过复矢量的表示方法电机在同步坐标系中的dq轴耦合以电机模型极点的虚部形式来体现,虚部的大小与同步角频率有关,同时在静止坐标系中感应电机模型可以由下面所示简单的电阻/电感复矢量传递函数表示:

为了在离散域内对电流调节器的设计和性能进行分析,对感应电机在离散域内的建模至关重要,将式(3)所示的物理系统转换到离散域内的通常做法是将逆变器作为一个理想的零阶保持器,则在静止坐标系中感应电机在离散域内的表示为
将式(4)转换为在同步坐标系中的差分方程[9]见下式:
其中
最后得到在同步坐标系中感应电机离散域的传递函数如下:

图2给出了同步坐标系下感应电机模型在离散域中的极点随同步频率上升的移动轨迹,其中同步频率由零上升到 100 Hz,Ts=285 μs,箭头表示轨迹的移动方向。可以看出电机的极点逐渐向外移动,这意味着随同步频率上升,电机在同步坐标系中的dq轴耦合加剧,电机的稳定性降低。

图2 离散域电机模型极点随同步频率上升的移动轨迹Fig.2 Discrete domain pole migration of induction motor with synchronous frequency increase
此外考虑到矢量控制系统在数字实现中存在的特有问题:在数字控制中当系统在t[k]时刻进行第k次采样后,经DSP计算得到第k+1个电压指令信号,该信号在t[k+1]时用于下一个PWM脉冲的更新,这个过程相当于控制器输出的电压指令延迟了1个采样周期,如图3所示。将这个在静止坐标系下为z-1的PWM更新延迟转换到同步坐标系中可以用(z⋅ejωe⋅Ts)-1表示,得到考虑延迟的感应电机离散域传递函数为

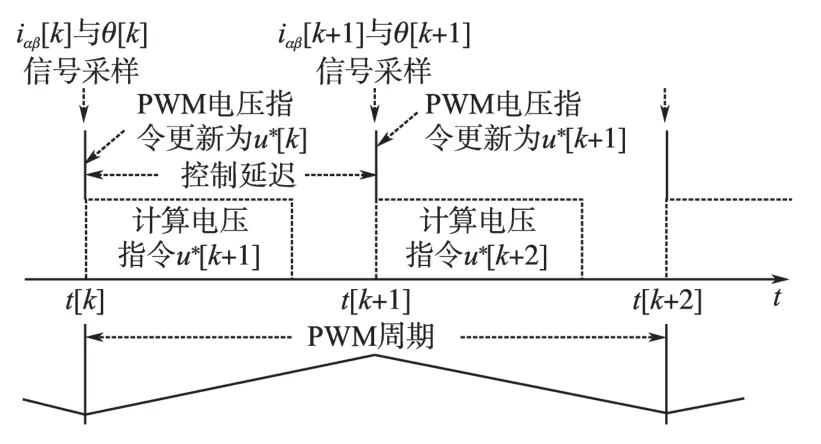
图3 感应电机数字控制系统中的控制延迟Fig.3 Control delay in induction motor digital control system
图4给出了考虑数字系统的控制延迟后感应电机模型在离散域内的极点随同步频率上升的移动轨迹,可以看出图4中增加了一个由数字控制延迟产生的极点。
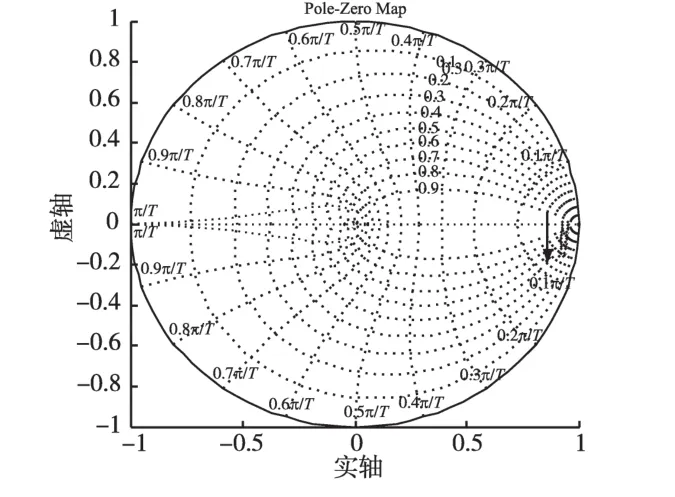
图4 考虑数字控制延迟的离散域电机模型极点移动轨迹Fig.4 Discrete domain pole migration of induction motor with synchronous frequency increase considering control delay
2 离散域内电流调节器的设计与性能分析
2.1 离散域内的同步坐标系PI电流调节器
由于在同步参考坐标系中电机所有的电气变量都有直流稳态值,这使得采用简单的PI调节器就能够获得良好的效果控制。通过双线性变换可以得到离散的同步坐标系PI电流调节器表达式为

考虑到数字系统中控制延迟的存在会使期望的基波激励在一个采样周期内位置发生改变,如果电流调节器的输出没有反映该变化,则这个变化对系统而言将视为一个扰动。为了获得高性能的电流调节,可以在电流调节器的设计中通过使电压给定相位超前来补偿该延迟,补偿后的电流调节器表示如下[9]:

同时可以得出电流环的闭环传递函数见下式,本文接下来讨论的电流调节器中都将包含该延迟补偿项。
调节器系数的选择通常采用在连续时间域内电机模型在零同步频率时的极点能够与调节器零点对消的原则,即Kp=Lσ⋅ωbw,Ki=R⋅ωbw,ωbw为期望的电流环带宽。

图5 采用离散PI电流调节器随同步频率上升电流环的零极点轨迹图Fig.5 Pole-zero migration of current loop with synchronous frequency increase using discrete PI current regulator
为了分析电流环性能受同步频率的影响,图5给出了在离散域内随着同步频率上升电流环零极点的移动轨迹,其中同步频率由零上升到100 Hz,Ts=285 μs,电流环带宽选择ωbw=100∙2π rad/s,箭头表示轨迹的移动方向。可以看出随着同步频率上升,电流环的闭环极点向单位圆边界移动,且由调节器引入固定的零点在同步频率上升时没有起到调节电流环性能的作用,可以预见系统的稳定性将逐渐降低。
2.2 离散域内的同步坐标系复矢量电流调节器
采用传统的同步坐标系PI电流调节器虽然实现简单,但在高速条件下系统的性能会逐渐恶化。同步坐标系复矢量电流调节器通过在连续域内将调节器的复数零点设计成与电机模型复数极点对消的方法,理论上能够在宽速范围内完全消除同步坐标系交叉耦合的影响,具有更好的调节性能,它在连续域内的表达式为

使用双线性变换将其转换到离散域后的表示如下:

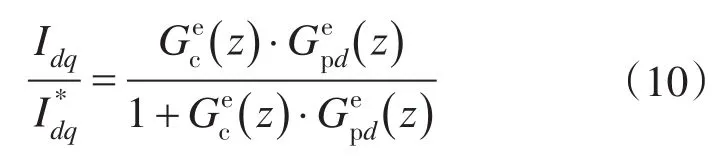
调节器中系数的选择同样为Kp=Lσ·ωbw,Ki=R·ωbw。根据式(10)可以得到电流环的闭环传递函数。
图6给出了采用同步坐标系复矢量电流调节器在离散域内随着同步频率上升电流环零极点的移动轨迹,同步频率同样由零上升到100 Hz,Ts=285 μs,箭头表示轨迹的移动方向,为了方便比较调节器的带宽也选择为ωbw=100∙2π rad/s。
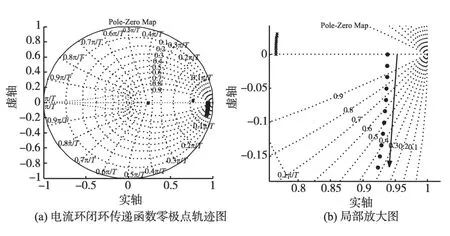
图6 采用离散复矢量电流调节器随同步频率上升电流环的零极点轨迹图Fig.6 Pole-zero migration of current loop with synchronous frequency increase using discrete complex vector current regulator
可以看出随着同步频率上升,电流环的闭环极点小幅向外移动,且由调节器引入的零点能够随同步频率改变并与系统的极点对消,改善了系统的稳定性。但是也看到闭环函数依然存在无法对消的随同步频率变化的极点且在高频时零极点对消的准确性出现下降,这是由连续系统转换到离散系统产生的偏差,必然会对电流环性能产生不利影响。
2.3 基于直接离散的复矢量电流调节器
无论是同步坐标系PI电流调节器还是复矢量电流调节器,都是基于在连续域内零极点对消的原理,然后再对设计好的调节器进行离散化,但从分析结果可以看出在离散域内随着同步频率的上升,这两种调节器都无法提供最优的调节性能。
本节引入了直接离散的复矢量电流调节器,通过在离散域内直接对电流调节器进行设计,使离散电流调节器的零点与离散电机模型的极点对消,避免了由离散化导致电流调节器性能的偏差。
根据上述原理得到基于直接离散的复矢量电流调节器表达式如下:

式中:K为调节器系数。
当电机参数准确时得到电流环闭环传递函数为

通过图7给出的电流环零极点移动轨迹可以看出,在同步频率由零上升到100 Hz时电流环零极点在任何时刻都得到非常好的对消,电流环只受到2个固定极点的影响而与转速无关,因此系统性能能够得到很大改善。
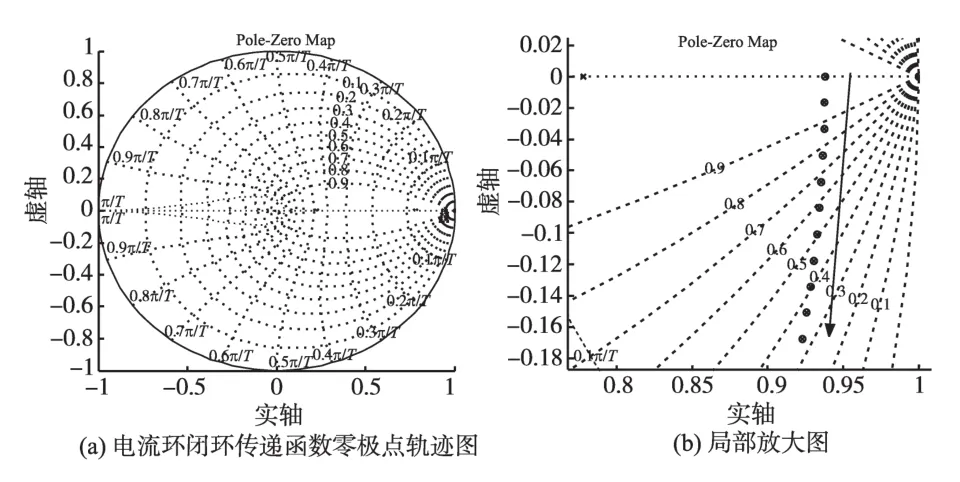
图7 采用直接离散的复矢量电流调节器随同步角频率增加电流环的零极点轨迹图Fig.7 Pole-zero migration of current loop with synchronous frequency increase using direct discrete complex vector current regulator
3 仿真结果
本文基于Matlab/Simulink建立了感应电机矢量控制系统的仿真模型,采用间接磁场定向和文献[10]中的弱磁方法,对本文3种离散电流调节器方法进行了比较。仿真中的电机相关额定值为:Pe=4 kW,Ue=380V,fe=50 Hz,Te=25 N∙m,ne=1 460 r/min。电机参数:Rs=1.087 Ω,Rr=0.788 Ω,Ls=Lr=148 mH,Lm=140 mH,np=2。PWM开关频率fs=3.5 kHz,直流母线电压Vdc=540 V。
图8~图10分别给出了采用3种不同离散电流调节器的系统响应,电机在空载条件下启动。
图8 采用离散同步坐标系PI电流调节器的系统响应Fig.8 System responses using discrete PI current regulator

图9 采用离散同步坐标系复矢量电流调节器的系统响应Fig.9 System responses using discrete complex vector current regulator
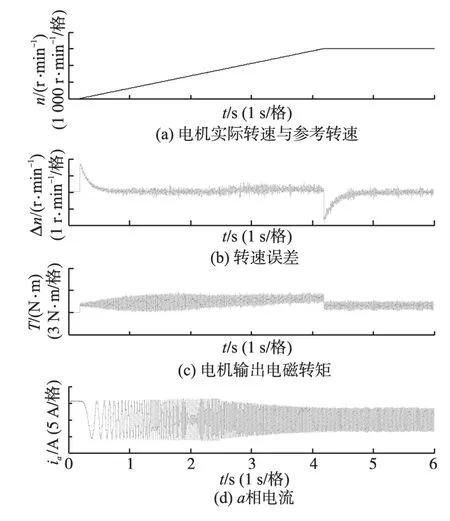
图10 采用直接离散复矢量电流调节器的系统响应Fig.10 System responses using direct discrete complex vector current regulator
从图8可以看出,当采用离散的同步坐标系PI电流调节器,电机能够稳定启动并弱磁运行一定阶段,而当转速继续上升到较大值时,系统出现不稳定现象,电机的电磁转矩和相电流存在大幅振荡,转速发生波动,这与前面的分析一致。
相比较从图9中给出的采用离散的复矢量电流调节器系统响应结果可以看出,电机无论在基速以下还是在整个弱磁阶段都能够稳定运行。
图10为采用直接离散复矢量电流调节器系统的响应,与图9中结果相对比,可以看出系统在高速弱磁运行时具有更好的动态性能,电机转速、电磁转矩以及电流的波动较小,表明该电流调节器具有更为优越的性能。
4 实验结果
本文采用TMS320F2812 DSP数字控制芯片对直接离散复矢量电流调节器的有效性进行了验证,实验电机参数与仿真模型完全相同,系统PWM控制开关频率fs=3.5 kHz。出于高转速安全运行考虑,将母线电压Vdc设定为270 V,目标运行频率50 Hz,即此时相当于电机弱磁升速于100 Hz运行。图11a和图11b为电机加速和减速运行结果,图11c和图11d为带载40%正负转矩切换运行结果。由实验结果可以看出驱动系统具有良好的弱磁升速和动态性能。

图11 直接离散复矢量电流调节器运行结果(50 Hz)Fig.11 Experimental results using direct discrete complex vector current regulator(50 Hz)
进一步在实验中将母线电压Vdc设定为540 V,目标运行频率为70 Hz。图12给出了电机空载启动和带80%额定负载的运行结果,可以看出系统在全速范围内都能够稳定运行。
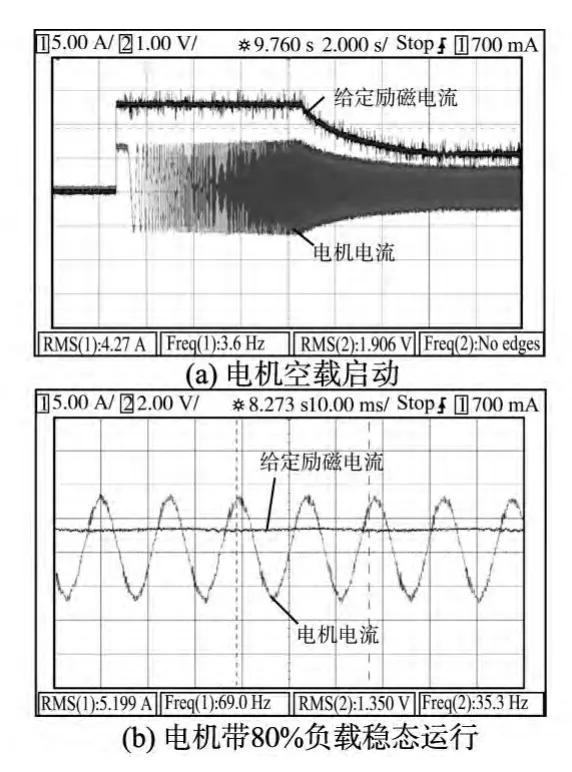
图12 直接离散复矢量电流调节器运行结果(70 Hz)Fig.12 Experimental results using direct discrete complex vector current regulator(70 Hz)
5 结论
本文在离散域内分析了感应电机矢量控制系统使用同步坐标系PI电流调节器与复矢量电流调节器的性能。研究表明在高速条件下,这两种调节器会由于电机dq轴耦合以及设计从连续域转化到离散域产生的偏差而导致系统性能下降,同时给出了直接离散的复矢量电流调节器的设计方法,通过在离散域内直接使电流调节器的零点与电机模型极点对消,保证了系统性能不受转速影响。仿真和实验结果表明采用这种电流调节器设计方法能够在宽速度范围内获得良好的性能。
[1]Rowan T,Kerkman R.A New Synchronous Current Regulator and an Analysis of Current-regulated PWM Inverters[J].IEEE Transactions on Industrial Applications.1986,22(4):678-690.
[2]Fernando Briz,Michael W Degner,Robert D Lorenz.Dynamic Analysis of Current Regulators for AC Motors Using Complex Vectors[J].IEEE Transactions on Industrial Application,1999,35(6):1424-1432.
[3]Fernando Briz,Michael W Degner,Robert D Lorenz.Analysis and Design of Current Regulators Using Complex Vectors[J].IEEE Transactions on Industrial Application.2000,36(3):817-825.
[4]Huh Kum-Kang,Robert D Lorenz.Discrete-time Domain Modeling and Design for AC Machine Current Regulation[C]//Industry Applications Conference,Wisconsin,Madison.2007:2066-2073.
[5]沈凤龙,满永奎,王建辉,等.矢量控制系统调节器设计及实验研究[J].电气传动,2013,43(2):3-6.
[6]伍小杰,袁庆庆,符晓,等.基于复矢量调节器的低开关频率同步电机控制[J].中国电机工程学报,2012,32(3):124-129.
[7]韦克康,周明磊,郑琼林,等.基于复矢量的异步电机电流环数字控制[J].电工技术学报,2011,26(6):88-94.
[8]杨立永,田安民.交流电机离散电流调节器的设计[J].电力电子技术,2011,45(5):62-64.
[9]Hongrae Kim,Michael W Degner,Juan M Guerrero,et al.Discrete-time Current Regulator Design for AC Machine Drives[J].2010,46(4):1425-1435.
[10]Kim Sang-Hoon,Sul Seung-Ki.Voltage Control Strategy for Maximum Torque Operation of an Induction Machine in the Field-weakening Region[J].IEEE Trans.on Industry Electronics,1997,44(4):512-518.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
宇航计测技术(2018年3期)2018-09-08
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
汽车与新动力(2014年6期)2014-02-27