
压电陶瓷驱动器迟滞建模与控制研究
2014-10-10 06:13葛尊彪
机电信息 2014年9期
姜 刚 葛尊彪
(苏州大学机电工程学院,江苏 苏州215021)
0 引言
压电陶瓷驱动器具有体积小、位移分辨率高、频响高、无噪声、不发热等优点,是一种理想的微位移元件,广泛应用在超精密驱动、定位和控制系统中。但是,压电陶瓷具有迟滞非线性,影响定位精度,给系统控制带来了困难[1]。要减小压电陶瓷的迟滞非线性影响,主要可从压电陶瓷的内部机理、迟滞建模、控制方法和驱动方式等几个方面采取措施[2]。其中,对压电陶瓷进行迟滞建模并设计控制算法是减小迟滞的一个有效途径。针对压电陶瓷驱动器的迟滞现象,本文采用Prandtl-Ishlinskii算子建立迟滞模型及其逆模型,并采用自适应逆控制算法构建控制系统,对压电陶瓷进行了实验研究。
1 迟滞模型的建立
1.1 迟滞模型的特点
压电陶瓷的迟滞特性是指压电陶瓷的升压曲线和降压曲线不重合,之间存在位移差。压电陶瓷的迟滞非线性属于非局部存储型迟滞非线性,是压电陶瓷固有的特性。其主要特点为系统下一时刻的输出不仅取决于当前时刻的输入和输出,还取决于输入的历史。压电陶瓷的迟滞环是不对称的,即上升轨迹和下降轨迹之间没有对称轴。如图1所示,在某一输入驱动电压范围[U0,Un]内,最外部的迟滞曲线称为主迟滞环,其内部的迟滞曲线称为小迟滞环,对于 U∈[U0,Un],其迟滞曲线变化均在主迟滞环以内。它具有如下性质:在A点转换方向的任意迟滞曲线由该点输入和输出值唯一确定;迟滞曲线C1上的任意点B变成新的转折点,则从B点出发的曲线C2一定返回A点;曲线C2达到A点,其下一步的变化与主迟滞曲线C重合;通过非转折点D的多条曲线的变化趋势由相关的输入历史唯一确定;每个迟滞环曲线之间具有一定的相似性。

图1 压电陶瓷迟滞特性示意图
1.2 建立模型
比较理想的迟滞数学模型应符合以下条件:数学描述简单,模型参数较少;模型参数容易辨识,对输入、输出数据及未知误差的变化反应不灵敏,具有一定的鲁棒性;存在迟滞逆模型,并容易获得;模型能够精确描述迟滞现象。基于上述建立压电陶瓷迟滞模型的基本要求,采用Prandtl-Ishlinskii迟滞算子建立迟滞模型,该迟滞模型由许多通过加权叠加的基本迟滞算子组成,这些基本迟滞算子通过一个或多个参数的不同来区别。Prandtl-Ishlinskii迟滞算子可以表示为:

式中,x(t)和y(t)分别为系统的输入和输出信号;x(t0)和y(t0)为迟滞算子初始值;r为迟滞算子的阈值。
系统输出信号y(t)由系统初始状态z(t0)=[x(t0),y(t0)]和系统输入信号决定。有着不同阈值r的多个基本迟滞算子通过加权叠加,可以精确描述迟滞现象。图2表示了Prandtl-Ishlinskii迟滞算子变换特性。
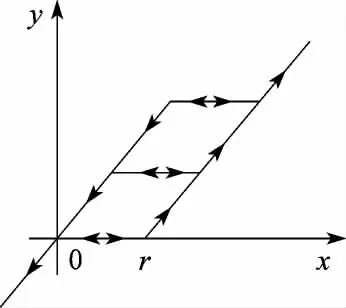
图2 Prandtl-Ishlinskii迟滞算子特性
Prandtl-Ishlinskii迟滞算子 Hr[x](t)可以进一步表示为:

为实时计算弥补信号,必须用到数字信号处理,所以必须推导出一个在时间上离散的算子模型。离散迟滞算子可由式(2)得到:

且满足初值 pr[x](t0)=max{x(t0),min{x(t0)+r,y(t0)}}。
具有不同阈值的多个Prandtl-Ishlinskii迟滞算子加权叠加就可以用来描述复杂的迟滞数学模型:

其中,ωi是迟滞算子权值向量,Z0是模型的初始状态向量。由于基本的Prandtl-Ishlinskii迟滞算子具有连续性,任何复杂的迟滞特性都可由有限数目的基本算子来建立足够精确的模型。
由Prandtl-Ishlinskii迟滞模型可以得到迟滞逆模型:

式中,W′、r′、Z′0分别是与迟滞模型相对应的权值向量、阈值向量和初始状态向量。
2 控制算法设计
对压电陶瓷进行迟滞建模并设计控制算法是减小迟滞的一个有效途径。自适应逆控制的核心部分是被控制对象的模型和逆模型的自适应调整过程。最小均方误差(L MS)算法简单且收敛速度快,所以采用L MS算法。L MS算法的误差必须是针对对象输入的,也就是针对自适应控制器输出的。为了利用L MS算法及其高速自适应过程,提出图3所示的一个实用的自适应逆控制系统。通过用来自系统输出与迟滞模型输出的误差直接对迟滞模型进行自适应调节,应用自适应L MS辨识方法获得迟滞模型H,然后求得迟滞逆模型H-1,一旦迟滞逆模型得到就可以用一个完全的数字复制作为对象的控制器。

图3 自适应逆控制系统
L MS算法权值向量更新的表达式为:

其中,ek=Yk-。Yk为系统实际输出为迟滞模型输出;标量参数μ是收敛因子。当偏差ek足够小时,将获得权值向量,进而获得迟滞模型。
3 跟踪控制实验
为了验证自适应逆控制算法和所建立的迟滞模型以及逆模型的正确性,建立如图4所示实验系统进行研究。在该实验系统中,采用哈工大博实精密公司生产的NANO-50C型一维精密定位工作台;采用德国PI公司P-830.40型压电陶瓷驱动器作为执行元件,最大行程60μm;采用哈工大博实精密公司生产的HPV型高性能压电陶瓷驱动电源,输出电压范围0~120 V,输出纹波小于5 mV;采用德国SIOS公司AE SP 500E型激光测微仪作为传感器,测量范围0~500 mm,分辨率1.3 n m;采用ADLINK公司的9118 HR卡来实现数据采集及模拟输出的功能。
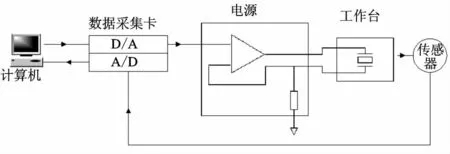
图4 微定位控制系统原理图
在该实验中,采用Visual C++编程。计算机输出数字信号,经D/A转换成模拟信号,并经压电陶瓷驱动电源放大后作用于压电陶瓷驱动器,压电陶瓷驱动器驱动微动平台运动,位移传感器检测到位移信号后经A/D转换成数字信号返回计算机。实验结果如下所示,图5为输入的建模信号,是一组幅值变化的三角波。图6为初始状态的系统输出,图7为采用自适应逆控制算法后的系统输出。可以看出,压电陶瓷的迟滞非线性明显减小,系统的输出非线性误差从±17.7%下降到±1.43%,系统性能显著提高。
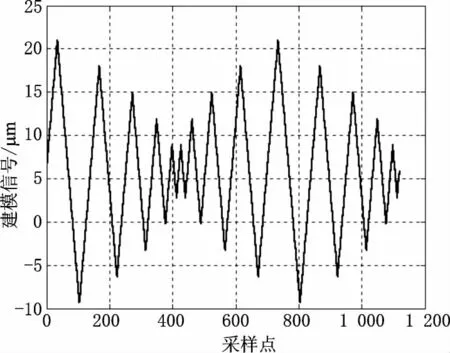
图5 输入的建模信号

图6 初始状态的系统输出

图7 采用自适应逆控制算法后的系统输出
4 结语
本文针对压电陶瓷的自身迟滞非线性问题,基于Prandtl-Ishlinskii迟滞算子建立压电陶瓷迟滞模型及其逆模型,采用自适应逆控制算法,搭建实验系统进行了控制研究。PI迟滞模型具有模型简单、运算量小、拟合精度高且逆模型容易求取等优点。实验结果表明,采用自适应逆控制算法,压电陶瓷的迟滞非线性显著降低,从而证明了所提出的建模方法及控制算法的正确性。
[1]王希华,郭书祥,汝长海,等.基于压电陶瓷迟滞非线性的建模方法[J].哈尔滨工程大学学报,2010(1)
[2]汝长海.压电陶瓷驱动器极化模型及控制方法的研究[D].哈尔滨:哈尔滨工业大学,2005
猜你喜欢
电脑爱好者(2020年6期)2020-05-26
压电与声光(2019年1期)2019-02-22
铜仁学院学报(2018年6期)2018-07-05
制造技术与机床(2017年6期)2018-01-19
光学精密工程(2016年5期)2016-11-07
电源技术(2015年9期)2015-06-05
上海电机学院学报(2015年3期)2015-02-28
西安交通大学学报(2014年7期)2014-04-16
组合机床与自动化加工技术(2014年12期)2014-03-01
振动、测试与诊断(2014年6期)2014-03-01
