
越野车辆电传动耦合机构的仿真分析
2014-12-03 06:29贾小平樊石光于魁龙
车辆与动力技术 2014年4期
贾小平,马 骏,樊石光,于魁龙
(装甲兵工程学院 北京 100072)
车辆工业在当代世界经济活动中发挥了巨大的作用,而车辆工业的迅猛发展也导致了当今世界对于能源和环保的问题的关注,为解决这些能源和环保问题,电动车辆呈现出加速发展的趋势[1].电动车辆的优势不仅仅在于采用绿色能源电力驱动,同时电传动装置具有很多明显的优势,例如可以实现无级变速,操控简单,噪音小等,最主要的是车辆采用的传动装置不仅可以保证车辆的良好直驶性能,而且还能更好的满足车辆转向性能要求.目前关于耦合机构的研究常见的是单行星排的耦合机构,即在行星排构件中其中两个作为不同动力输入源进行耦合.关于双行星排的耦合机构研究还比较少,双行星排耦合机构可以作为电动车辆的传动装置,其主要优点是:能够实现固定轴齿轮机构所不能实现的多个自由度速度分解或合成;多点啮合传递动力;传动时径向力平衡;结构比较紧凑等[2].同时减少车辆转向时的控制难度,可以实现良好的转向性能.
1 方案设计及模型建立
1.1 确定车辆布置
采用双电动机作为动力输出装置,耦合机构作为传动装置,车辆动力可以由发动机提供,发动机带动发电机产生电能,然后带动电动机转动,同时也可以采用蓄电池作为动力来源.这里讨论发动机提供动力时的车辆布置方案,如图1所示.其中M代表发动机,F代表发电机,D1,D2代表双侧电动机,B代表耦合机构,与两侧减速机构相连.
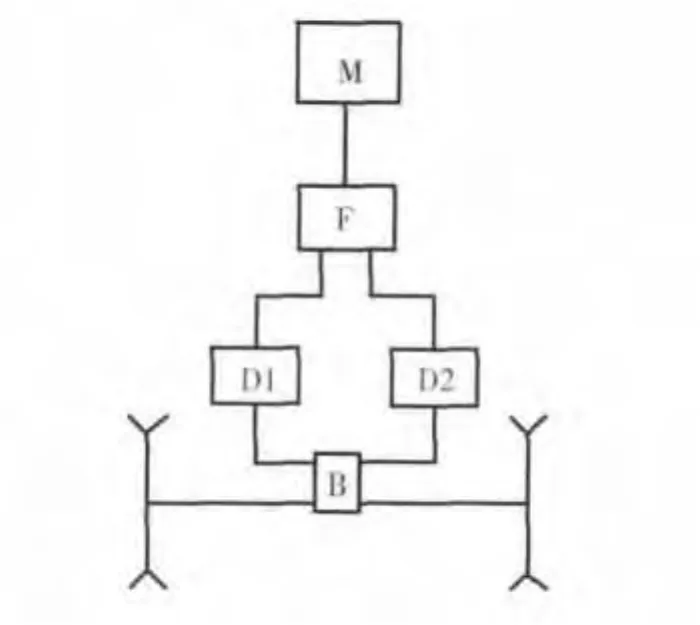
图1 车辆布置方案
电动机分别与两排太阳轮固连,作为输入,1排行星架j1与2排齿圈q2固连,2排行星架j2与1排齿圈q1固连.两排行星架分别作为左右两侧输出轴通过机械连接与两侧主动轮相连,完成动力的输出.根据相关文献研究显示,此时的行星排的效率最高[3-4].行星排耦合机构原理如图2所示.此时,通过控制左右两侧电动机的输出转速的大小和方向来控制车速,实现无极变速和倒车功能,当控制左右电动机的转速大小或者方向不同时,便可以实现转向半径不同的车辆转向,从而使车辆的操控性能更好.
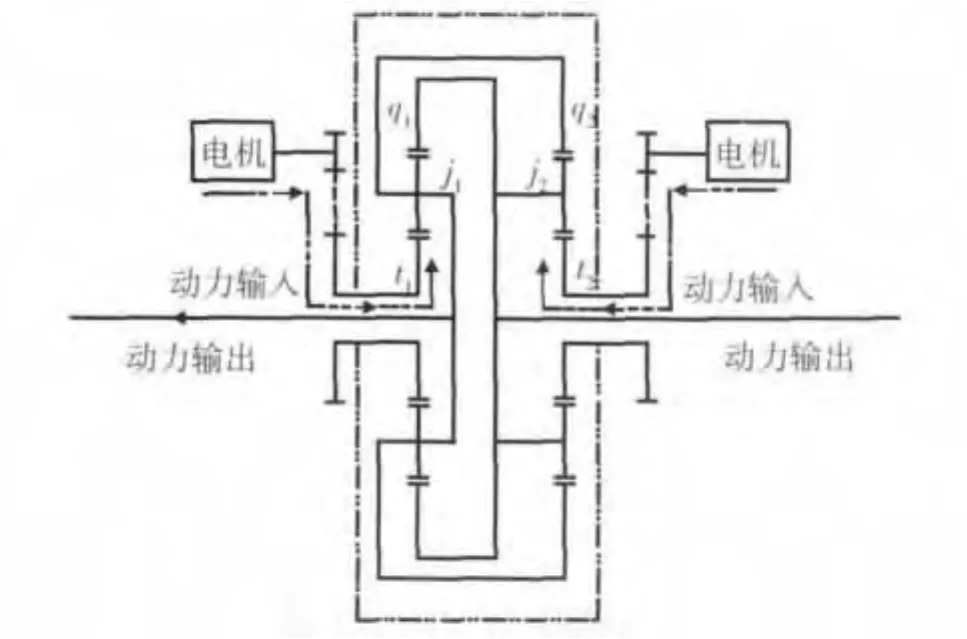
图2 耦合机构原理图
1.2 双行星排耦合机构建模
首先对行星排进行参数设计计算,为了使仿真研究方便,耦合机构的两个行星排采用相同的参数,所以只需对其中一个排进行配齿计算,满足传动比条件、同心条件、装配条件以及相邻条件,得出行星排参数见表1.
行星排设计完成之后,对行星排进行建模,采用多体动力学优化仿真技术软件RecurDyn的齿轮工具包 (RecurDyn/Gear)进行建模分析,建模结果如图3 所示[5].

表1 行星排参数

图3 双行星排耦合机构模型
2 行星排耦合机构仿真分析
建立耦合机构模型后,对其进行约束及驱动建模,在每个行星排中,齿圈和太阳轮分别与行星轮加入齿轮副,太阳轮处加入转动副,1排行星架j1与2排齿圈q2、2排行星架j2与1排齿圈q1分别加入固定副,行星轮架分别与输出轴加入固定副,这样,完成耦合机构约束的建立.下面对差速转向和中心转向两种工况进行仿真分析[6].
(1)差速工况
在1排太阳轮处施以100π(314)rad/s的转速,2排太阳轮不输入 (0rad/s),用以模仿电动机的输入转速,在输出轴上加入30000 N·m的力矩,用以模拟车辆负载,完成耦合机构的驱动.进行仿真分析,得出左右两侧输出轴的输出转速见图5和图6,齿圈与行星轮的啮合力见图7,太阳轮与行星轮的啮合力见图8,齿圈和太阳轮处所受到的力矩见图9和图10.
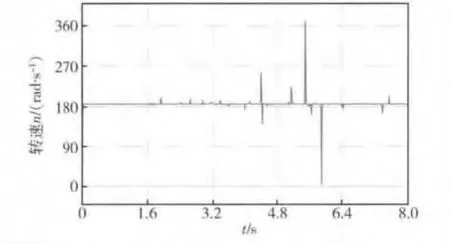
图5 行星排1输出轴转速

图6 行星排2输出轴转速

图7 齿圈与行星轮啮合力

图8 太阳轮与行星轮啮合力
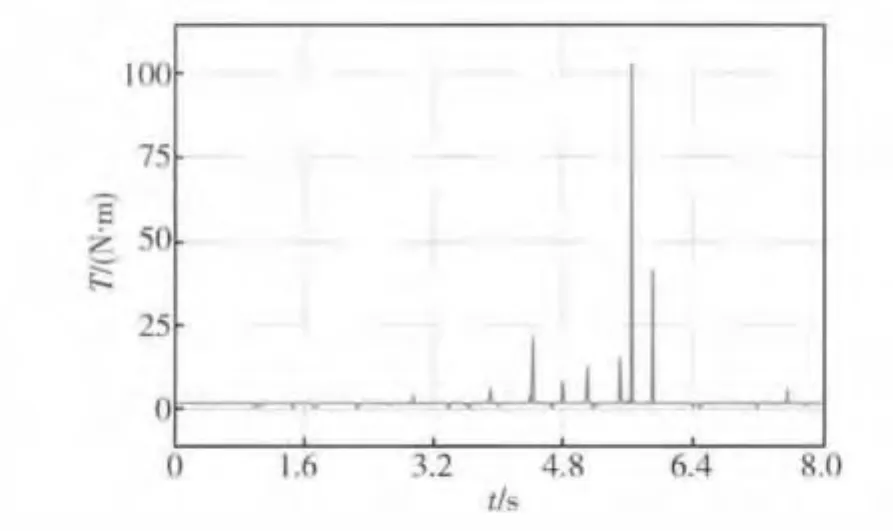
图9 齿圈力矩
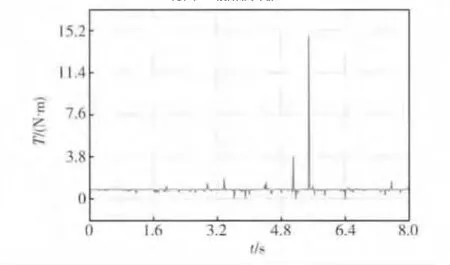
图10 太阳轮力矩
因为行星排1主要承担动力输出,所以齿圈和太阳轮与行星轮的啮合处所受到的力更大,所以仿真图形只列出行星排1的相关曲线.由于仿真过程中的不稳定状态,所以可能出现一些影响仿真结果的“尖点”,去除仿真图线中的尖点之后得到可用数据,对可用数据取平均值,得出仿真结果,分别为:行星排1的行星架输出转速为 n1=185.27 rad/s,n2=128.61 rad/s,行星排1的齿圈啮合力为fq=36292.45 N,太阳轮处的啮合力为ft=34087.76 N,齿圈所受到的力矩为Tq=2028.36Nm,太阳轮所受到的力矩为 Tt=864.13 Nm.
(2)中心转向工况
在1排太阳轮处施以10π(31.4)rad/s的转速,2排太阳轮输入-10π(-31.4)rad/s的转速,用以模仿电动机的输入转速,在输出轴上加入30000 Nm的力矩,用以模拟车辆负载,完成耦合机构的驱动.进行仿真分析,得出左右两侧输出轴的输出转速见图11;行星排1齿圈啮合力见图12;行星排1太阳轮啮合力见图13.
同上,去除仿真图线中的尖点,对可用数据取平均值,得出仿真结果.分别为:行星排1的行星架输出转速为n1=5.7002 rad/s,n2=-5.6987 rad/s,行星排1的齿圈啮合力为fq=29957.62 N,行星排1的太阳轮啮合力为ft=29885.93 N.
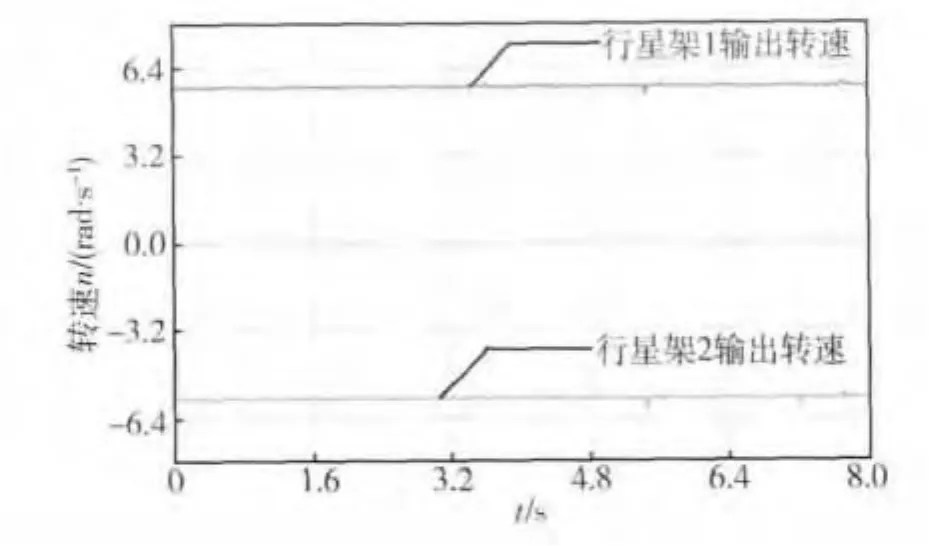
图11 行星排两侧输出转速
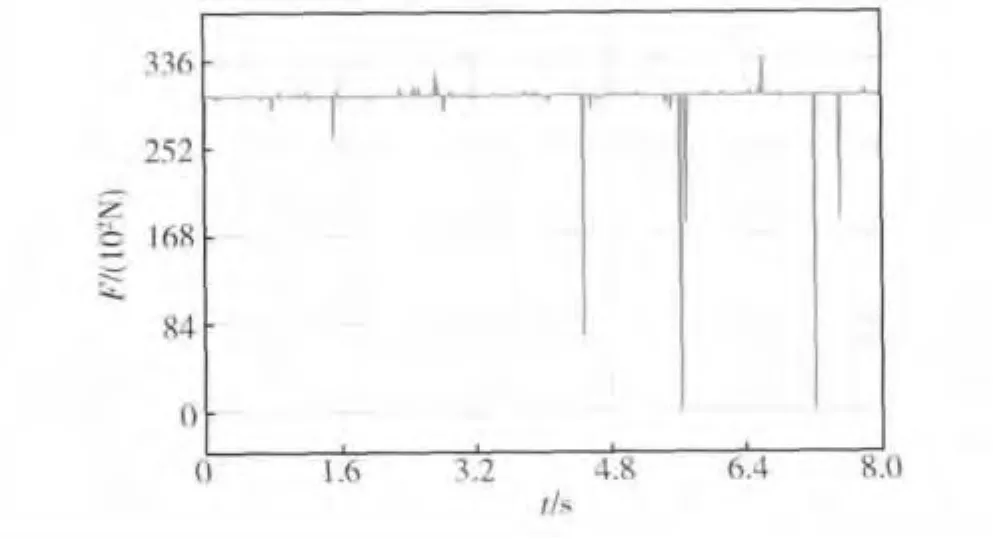
图12 行星排1齿圈啮合力

图13 行星排1太阳轮啮合力
3 仿真结果计算分析
3.1 转速分析
根据行星传动的转速关系式nt+knq-(1+k)nj=0(k为行星排的参数)来进行理论计算:

(1)差速转向工况
由前文分析得到的已知条件有:

其中,nti,nji,nqi(i=1,2)分别为行星排1(i=1)和行星排2(i=2)中太阳轮、行星架、齿圈的转速.将已知条件带入到行星排转速关系式中,计算得到

这与仿真曲线的平均值十分接近,说明仿真结果比较靠近真实结果.
(2)中心转向工况
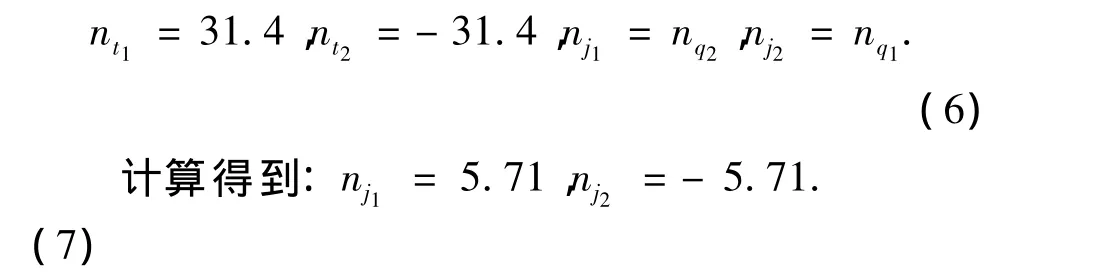
同样与仿真曲线相一致,
3.2 受力分析
根据行星机构的转矩关系式[6]

式中:Ft,Fj,Fq分别为太阳轮、行星架、齿圈作用于行星轮上的圆周力;Rt,Rq为太阳轮,齿圈的节圆半径;Rj为行星轮轴心到中心的半径.
由下式
进行下面的验证计算.
3.3 仿真分析
(1)差速工况
仿真结果中Ft,Fq的值基本相同,同时力矩Tq:Tt=2.34,也与理论值差距不大,说明仿真结果是有效可靠的.
(2)中心转向工况
仿真结果中齿圈受力Fq=29957.62 N,太阳轮受力Ft=29885.93 N基本相同,也与理论计算相符.
4 整车转向仿真及功率分析
利用RecurDyn进行整车的转向仿真,对不同转向半径进行仿真分析,图14是车辆2/B转向的轨迹图.
对车辆不同车速情况下的转向半径进行分析,分别算出在5m/s,4m/s,3m/s情况下,两侧速度差不同时的转向半径,得出转向半径随两侧速度差的关系,如图15所示.

图14 2/B转向轨迹
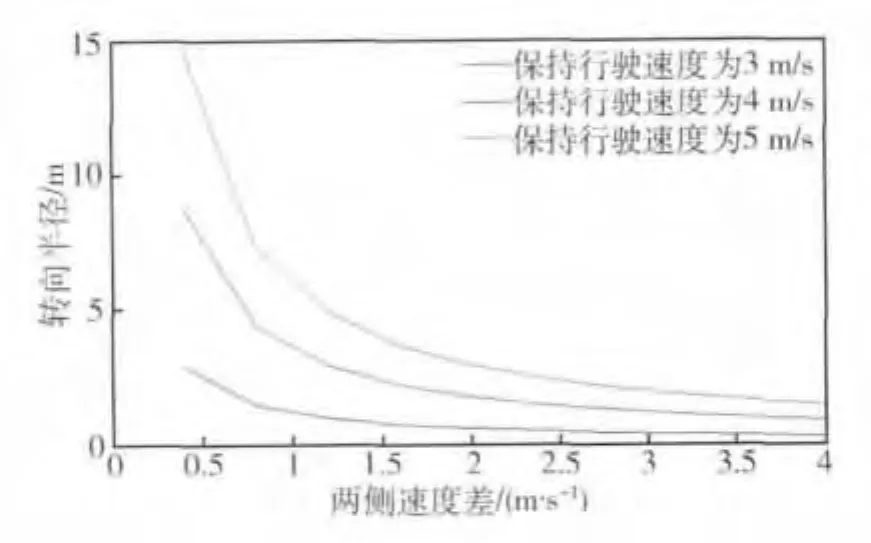
图15 转向半径随两侧速度差的关系
通过上述分析,耦合机构能够实现相应的直驶和转向功能,同时可以实现功率的耦合,在转向过程中,内侧电机多余的功率可以通过耦合机构传递到外侧输出轴,可以提高内侧电机的功率利用率,同时可以减少外侧电机的功率负荷,使其在转向过程中,相比于两侧独立电机直接输出,相同的越野车采用耦合机构时功率需求更小.这是使用耦合机构的显著优势.经过计算,在地面阻力系数为0.68的地面条件下,车重500 kg的越野车辆采用双侧独立电机输出时中心转向所需功率为5.53kW,采用耦合机构时中心转向所需功率为3.5kW,有着很明显的性能提升.
5 结论
通过确立车辆传动方案,建立双行星排耦合机构模型并进行仿真分析,仿真结果与实际相符,仿真曲线结果与理论计算相一致.说明仿真结果有效,及采用双行星排耦合机构作为履带车辆传动装置是可行的.分析了车辆差速转向和中心转向两种工况下车辆的输出转速,符合车辆转向需求,为耦合机构的进一步分析提供了依据,该转向模型也可用于车辆的下一步仿真分析,为后续电传动或者机电混合动力车辆的分析打下基础.
[1]陈清泉,孙逢春,祝嘉光.现代电动汽车技术[M].北京:北京理工大学出版社,2002.
[2]杨义勇,金德闻.机械系统动力学[M].北京:清华大学出版社,2009.
[3]崔 星,项昌乐.混合动力系统分流耦合机构工作模式分析[J].农业工程学报,2009,25(11):158-163.
[4]焦晓娟,张湝渭,彭斌彬.RecurDyn多体系统优化仿真技术[M].北京:清华大学出版社,2010.
[5]张 策.机械动力学[M].2版.北京:高等教育出版社,2008.
[6]杨通强,宋轶民,张 策,等.斜齿行星齿轮系统自由振动特性分析[J].机械工程学报,2005,41(7):50-55.
猜你喜欢
百科探秘·航空航天(2020年6期)2020-07-09
机械设计与制造(2020年4期)2020-04-28
中学生数理化·八年级物理人教版(2019年5期)2019-06-25
读者(2018年20期)2018-09-27
时代汽车(2018年12期)2018-06-18
制造技术与机床(2017年11期)2017-12-18
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09
少儿科学周刊·儿童版(2016年1期)2016-03-14
