汽车自适应巡航控制算法的仿真研究
2014-12-23 01:27王志洪邵毅明
计算机工程与设计 2014年2期
王志洪,邵毅明
(重庆交通大学 交通运输学院,重庆400074)
0 引 言
随着汽车技术的不断发展,汽车作为现代人们所必须的交通工具,呈现出高速化、智能化的趋势,并且驾驶人非职业化的程度越来越高[1]。因此为了保证驾驶人的驾驶安全性,驾驶辅助系统成为目前研究的热点,其中汽车自适应控制系统为汽车驾驶辅助系统的一个方面,由于其可以根据车辆之间的距离和相对速度,实时调整车辆的行驶速度,保证行驶的安全性。
对于ACC控制系统的研究,国内外研究学者已经取得了一定的研究成果。WANG Yuejian等人[2]提出了一种基于滑模控制 (SMC)方法的模型匹配控制 (MMC)方法,实现车辆巡航的速度控制。该控制方法建立了车辆加速度控制的传递函数,使用此传递函数建立包括SMC 反馈的MMC控制器,该控制器与传统PID 的MMC控制器相比响应速度更快更稳定。Payman Shakouri等人[3]提出一种使用单个控制回路的控制方法。该方法通过引入与前后车辆之间的相对距离和前车速度相对应的额外状态变量实现车辆速度和距离的跟踪,该方法使制动和节气门开度的控制更加平滑,车辆的行驶更加平稳。朱永强[4]这对汽车在坡道上行驶时,汽车行驶工况的不确定性,提出能够实现适时调整的自适应模糊PID 的汽车速度控制方法。汽车在不同驾驶工况下的仿真结果表明,该控制方法在汽车速度控制方面的优越性。田雷[5]基于模糊控制理论,对原来的汽车自适应巡航控制算法进行改进,提出了可以通过模糊控制方法进行自动调整的汽车自适应巡航控制方法。
本文主要进行车辆自适应巡航控制系统 (ACC)的控制方法的研究。依据本车与前车之间相对距离与安全距离的偏离和相对速度,建立不同的车辆ACC 控制器,依据多模型切换控制理论设计了模糊切换器,实现了车辆的ACC控制。并在matlab/simulink 的仿真环境中建立了仿真模型,对所提出的ACC控制算法进行了仿真验证。
1 控制策略
车辆ACC系统在控制过程中,必须保证驾驶过程中的安全性。根据本车与前车之间的相对距离与安全距离的偏差和两车之间的相对速度分别建立独立的ACC控制器。同时为了保证ACC 控制过程中控制系统的响应速度,通过模糊切换控制器对各个控制器的输出信号进行实时切换,以保证车辆ACC 控制系统的性能,其控制框架图如图1所示。
基于车辆之间的相对距离和相对速度的ACC 控制器彼此之间的控制是相互独立的。基于车辆间相对距离的ACC控制器反映了驾驶人在车辆行驶过程中,对车辆之间安全距离的跟踪;基于车辆之间相对速度的ACC 控制器反映了驾驶人对车辆跟驰行驶过程中对前车行驶速度的跟随特性;综合控制的ACC控制器是为了提高控制系统的相应速度和控制精度。

图1 车辆ACC控制的框架
2 自适应巡航控制过程中的安全距离模型的建立
传统的ACC 控制方法中的安全距离模型的数学表达式为

其中Vl为前车的行驶速度;TTC 为车间时距,通常该车间时距取1.4到3.0 之间[6]。这种安全距离,没有充分考虑车辆之间的相对速度的变化和驾驶人在实际驾驶过程中的操作特性。
因此使用Moon S等人[7]建立的安全车距模型。该模型是通过对采集的实车驾驶数据进行数据拟合而得到的,它反映了驾驶人在驾驶过程中车辆之间的安全距离与车速之间的关系

其中Ssafe为安全距离,v为车辆的行驶速度,λ和d0为反应驾驶人驾驶特性的参数。
车辆自适应巡航控制过程中,确定安全距离Ssafe的车速v可以是前车的速度,也可以是本车的速度。但是当前车稳定行驶过程中,本车跟随前车行驶过程中,本车的速度处于不断变化调整过程中。如果使用本车速度作为安全距离模型中的速度,就会使得安全距离具有波动性,从而不利于车辆动力学的控制。因此安全距离模型中的车速选用前车的速度。
在安全距离模型中,参数λ和d0的选择对车辆ACC控制过程中的舒适性有较大影响[8]。为了保证车辆的舒适性,在此取

3 ACC控制模型
3.1 车辆安全距离跟踪控制的ACC控制模型 (Ms)
ACC控制器跟踪的安全距离为以上提到的基于驾驶人操作特性的安全距离Ssafe。在车辆安全距离跟踪过程中,为了保证ACC控制过程中控制器的响应速度,将安全距离划分为3个范围,即 (0,0.8Ssafe)、 [0.8Ssafe,1.2Ssafe]和 (1.2Ssafe,+∞)。在本车与前车之间的相对距离在 (0,0.8Ssafe)或 (1.2Ssafe,+∞)范围内,进行车辆的安全距离跟随控制。
考虑到控制系统的复杂程度和PID 控制算法的优越性,选用PID 控制器作为车辆安全距离跟踪的控制器。在该安全距离控制过程中,以本车和前车之间的相对距离与安全距离Ssafe之间的偏差和两车之间的相对距离变化率作为PID控制器的输入,PID 控制器的输出则为广义节气门开度[9]。所谓广义节气门开度就是当输出为正时,表示发动机节气门开度,为负时,表示车辆的制动主缸压力。
3.2 车辆速度跟随控制的ACC控制模型 (Mv)
与车辆安全距离跟踪控制的ACC 控制模型相类似,在车辆的速度跟随控制过程中,也将车辆的相对速度划分为3个范围,即 (-50,-10)、[-10,10]和 (10,50)。当本车和前车之间的相对速度在 (-50,-10)或 (10,50)范围内时,使用速度跟随控制来实现车辆的ACC控制。
在此处的速度跟随控制器也同样选用PID 控制器作为速度跟随控制器。在车辆速度跟随控制过程中,以车辆之间的相对速度和本车的加速度作为PID 控制器的输入参数,广义节气门开度作为PID 控制器的输出参数。
3.3 综合控制的ACC控制模型 (Mc)
当本车与前车的安全距离在 [1.2Ssafe,0.8Ssafe]范围内,相对速度在 [-10,10]范围内时,为了减小本车在较小偏差情况下的跟随控制的信号震荡,提高系统的响应速度,使用模糊控制器作为综合控制的ACC 控制器。该模糊控制器以本车与前车的相对距离、相对速度、相对距离的变化率,相对速度的变化率作为控制输入,同样的以广义节气门开度作为控制输出。
模糊控制器控制输入的论域分别为 [0,40]、 [-5,5]、[-6,6]和 [-6,6]。为了保证模糊控制器的控制精度,模糊子集都选为 {NB,NM,NS,Z,PS,PM,PB}。输出的模糊论域为 [-150,100],模糊子集同样为{NB,NM,NS,Z,PS,PM,PB}。模糊控制器的控制性能主要取决于控制器的控制规则,使用相恒富提出的控制规则。对于一般的系统来讲,模糊控制器的输入输出的隶属度函数对控制器的性能不会有太大的影响[10],因此选用三角形隶属度函数。
4 车辆ACC控制的模糊切换控制器的设计
首先选择标识车辆巡航控制系统的状态变量。状态变量必须能够反映控制系统在整个控制范围内的变化[11]。在控制过程中,根据该状态变量的值来决定ACC控制系统的输出。为了综合考虑车辆对安全距离和前车速度的跟踪,选用控制信号P和P’作为切换控制器的输入。在此,P =k1×Es+k2×Ev,P’=k3×Es +k4×Ev ,其中Es本车与前车之间的相对距离与安全距离的偏差;Ev为两车之间的相对速度;Es 为两车之间相对距离的变化率;Ev 为两车之间相对速度的变化率。在此取k1=k3=0.4;k2=k4=0.6。
在车辆ACC实际控制过程中,控制系统的参数是不断发生变化的,因此模糊切换器要实时根据信号P 和P’的值确定模糊控制器的输出。在P 和P’的绝对值较小时,使用综合控制ACC 控制器,在P 和P’的绝对值较大时,分别使用安全距离跟踪控制器和前车速度跟踪控制器。
为了保证系统控制器切换过程中的平滑性,使用模糊控制器进行系统控制的切换[12]。以P和P’作为控制器的输入,以此来决定控制器的输出。各个局部控制器的输出作为系统的输出。模糊切换器的控制规则见表1。
该模糊切换器的结构图如图2所示。
5 车辆ACC控制器的仿真验证
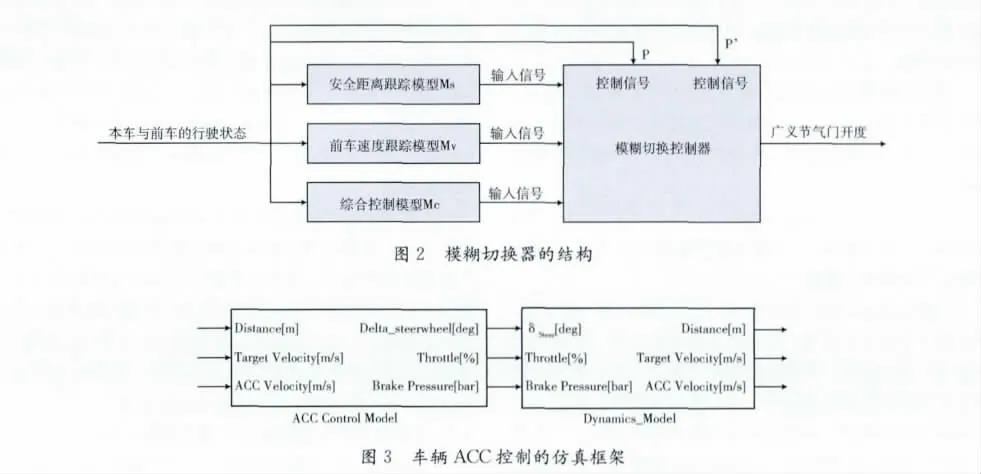
为了对所提出的车辆ACC控制方法进行验证,在matlab/simulink的仿真环境中,首先建立了车辆的动力学模型[13]。然后建立所提出的车辆ACC 控制方法,在simulink中的仿真框架,如图3所示。
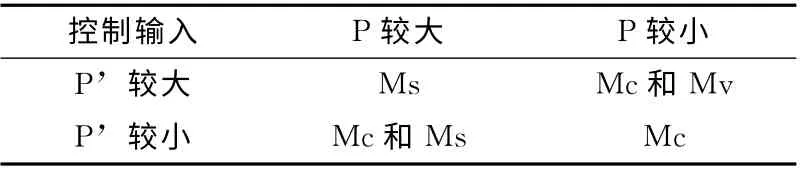
表1 模糊切换器的控制规则
5.1 跟随工况模拟
本车初始静止,通过ACC控制方法加速行驶,当检测到前车时,根据算法的控制跟随匀速行驶的前车行驶,前车的行驶速度为72km/h,仿真结果如图4所示。

图4 跟随工况下ACC控制方法的仿真结果
由以上仿真结果可以看出,所提出的ACC 控制方法在车辆控制过程中,可以很好的跟踪前车的速度和车辆之间的安全距离。由图4 (b)可以看出,车辆在没有检测到前车或者检测到前车但没有开始进行跟随控制的过程中,可以很好地跟踪驾驶人的期望速度行驶;当车辆开始跟随行驶后,由图4 (a)和图4 (b)可以看出,车辆对车辆之间的安全距离和前车的速度具有较高的跟随精度。
5.2 切入工况模拟
本车初始以100km/h 的速度行驶,另一车辆以80 km/h的速度行驶,并于本车前方30m 处切入本车所在车道,仿真曲线如图5所示。
在切入工况下,由图5 (a)可以看出,车辆可以通过ACC控制器的制动控制,避免与前车的碰撞,并且在此之后,还可以精确地跟踪车辆之间的安全距离;由图5 (b)可以看出,当检测到前方有车辆切入本车道时,车辆的速度迅速下降,虽然降低了乘坐的舒适性,但是保证了驾驶的安全性,并且可以很好地跟踪前车的速度行驶。
6 结束语
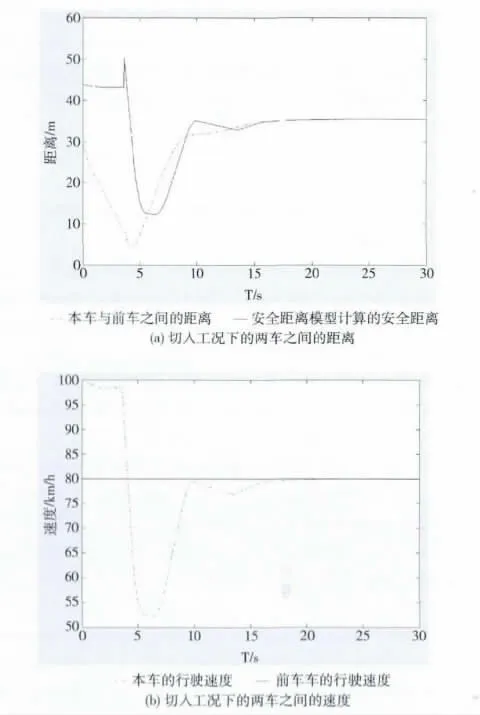
图5 切入工况下ACC控制方法的仿真结果
根据车辆跟车过程中本车与前车之间的相对距离和相对速度差异的不同程度,建立了基于多模型切换控制理论的车辆自适应巡航控制方法。在matlab/simulink的仿真环境中建立了车辆的动力学模型和车辆ACC 控制算法,并对该算法在车辆跟随工况和切入工况下进行了仿真验证。仿真结果表明,该控制算法不仅可以保证车辆行驶过程中的安全性,而且可以保证车辆对车辆之间安全距离和相对速度具有较好的跟随精度。
[1]MENG Fanjie.Study on driver modeling for speed control[D].Changchun:Jilin University Vehicle Engineering,2006(in Chinese).[孟繁杰.速度控制驾驶员建模研究 [D].长春:吉林大学车辆工程系,2006.]
[2]Wang Yuejian,Bin Yang,Li Keqiang.Longitudinal acceleration tracking control of low speed heavy-duty vehicles[J].Tsinghua Science and Technology,2008,13 (5):636-643.
[3]Payman Shakouri,Andrzej Ordys,Mohamad R,et al.Adaptive cruise control with stop&go function using the state-dependent nonlinear model predictive control approach [J].ISA Transactions,2012,51 (5):622-631.
[4]ZHU Yongqiang.Control strategy development and its environ-mental evaluation of automobile adaptive cruise system [D].Changchun:Jilin University Vehicle Engineering,2007 (in Chinese).[朱永强.汽车自适应巡航系统的控制策略开发及行驶环境评估 [D].长春:吉林大学车辆工程系,2007.]
[5]TIAN Lei.The research of fuzzy self-tuning control algorithm of automobile adaptive cruise control system [D].Changchun:Jilin University Vehicle Engineering,2006 (in Chinese).[田雷.汽车自适应巡航系统的模糊自校正控制算法研究 [D].长春:吉林大学车辆工程系,2006.]
[6]Sebastien Glaser,Sagar Akhegaonkar,Olivier Orfila,et al.Smart and green ACC,safety and efficiency for a longitudinal driving assistance [J].Advanced Microsystems for Automotive Applications,2013,13 (2):123-133.
[7]Moon S,Yi K.Human driving data-based design of a vehicle adaptive cruse control algorithm [J].Vehicle System Dynamic,2008,46 (8):661-690.
[8]PEI Xiaofei,LIU Zhaodu,MA Guocheng,et al.A hierarchical control algorithm of automobile cruise system [J].Transactions of Beijing Institute of Technology,2012,32 (5):479-483 (in Chinese).[裴晓飞,刘昭度,马国成,等.一种汽车巡航控制的分层控制算法 [J].北京理工大学学报,2012,32 (5):479-483.]
[9]XIANG Hengfu.Research on CO2laser constant temperature control based on fuzzy PID technology [J].Manufacturing Automation,2011,33 (5):44-46 (in Chinese). [相恒富.基于模糊PID技术的CO2激光器恒温控制研究 [J].制造业自动化,2011,5(33):44-46.]
[10]YANG Lunbiao,GAO Yingyi,LING Weixin.Fuzzy mathematics[M].Gangzhou:South China University of Technology Press,2011 (in Chinese).[杨纶标,高英仪,凌卫新.模糊数学原理及应用 [M].广州:华南理工大学出版社,2011.]
[11]JIA Baozhu,CAO Hui,MA Jie.Fuzzy switched multi-model control of hybrid system [J].Journal of Jiangnan University(Natural Science Edition),2012,11 (4):406-411 (in Chinese).[贾宝柱,曹辉,马捷.混杂系统模糊切换多模型控制 [J].江 南 大 学 学 报 (自 然 科 学 版),2012,11 (4):406-411.]
[12]WEN Yuanquan,REN Guang,WANG Hongwei.Multimodel fuzzy switching control and its application in ship heading control systems[J].Journal of Dalian Maritime University,2011,37 (3):8-12(in Chinese). [文元全,任光,王宏伟.多模型模糊切换控制在船舶航向控制中的应用 [J].大连海事大学学报,2011,37 (3):8-12.]
[13]CHAI Shan,JING Xu,WANG Longjiang,et al.Study of virtual driving simulation model based on vehicle system dynamics[J].Journal of System Simulation,2009,21 (8):2281-2284 (in Chinese).[柴山,荆旭,王龙江,等.基于汽车系统动力学的虚拟驾驶仿真模型研究 [J].系统仿真学报,2009,21 (8):2281-2284.]
猜你喜欢
科学技术与工程(2022年30期)2022-12-05
机械设计与制造(2022年5期)2022-05-19
汽车电器(2021年12期)2021-12-30
大众汽车(2018年11期)2018-12-26
制造技术与机床(2017年6期)2018-01-19
汽车工程(2017年8期)2017-09-15
人民交通(2016年9期)2016-06-01
电源技术(2015年9期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01
上海金属(2013年4期)2013-12-20