
反导早期预警雷达任务交班仿真模型研究
2015-01-01 03:19蔺美青赵英俊高玉良
现代雷达 2015年4期
刘 珂,蔺美青,赵英俊,高玉良
(1.空军工程大学防空反导学院, 西安710051;2.空军预警学院信息对抗系, 武汉430019)
0 引言
导弹防御作战中,早期预警相控阵雷达(以下简称预警雷达)担负着目标警戒和早期预警任务,并为多功能相控阵雷达(简称多功能雷达)提供目标指示和引导信息,确保对目标探测跟踪的连续性和稳定性。由于目标交班是预警雷达作战任务流程中的重要环节[1],恰当选择交班条件和交班时机,开展预警雷达交班策略研究,有利于推动预警雷达作战效能提升。仿真手段就是开展预警雷达交班策略研究的有效途径之一[2]。
国内针对反导预警雷达交接班问题的研究尚不多见。文献[1]针对弹道导弹早期预警雷达跟踪容量、跟踪资源利用问题,构建了跟踪能力分析模型;文献[2]针对导弹防御系统作战效能实验验证,建立了包括早期预警雷达的导弹防御雷达仿真技术框架;文献[3]给出了早期预警雷达发现概率解析模型;文献[4-6]对导弹防御雷达交接班问题开展了专门研究。
本文针对预警雷达交班策略研究问题,结合预警雷达的作战任务流程,梳理和分析预警雷达交班准则、交班条件,以及可考虑的交班策略。
1 任务交班准则和条件
1.1 作战任务和交班准则
导弹防御早期预警雷达的工作可细化为五个阶段[1]:(1)目标搜索,即雷达在责任区域设置搜索屏,进行弹道导弹等目标的搜索截获。(2)目标确认,即对穿过雷达搜索屏的目标,发射确认波束,确认为真实目标并转入跟踪状态,形成稳定航迹后,判明目标类型,做出发点、落点预报。(3)目标跟踪,对确认为真实的目标发射跟踪波束,进行稳定跟踪。(4)目标交接,随着跟踪时间的积累,弹道预报精度进一步提高,满足交班条件时,进行目标交接班。(5)目标消除,中枢情报处理单元反馈下一级雷达已经满足一定虚警条件下高概率截获目标,并对目标形成稳定跟踪,确认交接班成功,跟踪任务取消。
由于导弹目标不同于常规的飞机目标,具有飞行速度快、飞行轨迹有规律等特点,为确保预警雷达和下一级雷达的交接班效能,为导弹拦截系统提供充分的预警时间和引导精度,依据以上预警雷达早期预警任务流程,其任务交班时应遵循如下准则[3]。
(1)尽早交班。预警雷达截获并跟踪目标后,在满足一定限制条件的前提下(例如,多功能雷达实现较高的接班成功率),预警雷达应尽早提交交班数据。这样不仅压缩了预警雷达的目标探测时间,同时也为后续的接班等工作提供了更大的时间裕度。原则上预警雷达应在导弹飞行的前半段交班。
(2)快速交班。预警雷达交接过程要快速完成,为拦截系统提供尽可能长的反应时间。这就要求在预警雷达跟踪目标时不仅关注跟踪精度的提高,也要在时间资源利用等方面进行权衡和折中。
(3)节约能量。由于目标与雷达的距离对雷达探测跟踪能量需求的差异。预警雷达更容易以较少的能量发现近距离的目标[7-8]。因此,预警雷达应当在目标飞出一定距离范围时及时交班。
1.2 任务交班条件和策略
1.2.1 交班条件
根据预警雷达的使命任务和交班准则,预警雷达对目标的跟踪精度直接影响大X雷达截获性能,而且尽可能在目标飞行前半段,且目标位于一定探测范围之内进行交班。预警雷达交班条件:(1)目标剩余飞行时间满足临界条件,即到达导弹飞行前半段的转折点(例如,剩余飞行时间与目标飞行时间的比值为0.75的时空点,该点可由专家经验确定);(2)预警雷达提供的目标跟踪精度应足够高(例如,测角、测距等综合效用值大于0.9),应满足下一级多功能雷达的截获概率等需求,否则继续进行数据累积;(3)目标剩余飞行距离应满足一定临界条件(可利用目标剩余飞行距离和雷达最大探测距离的比值作为量化参考),以利于节约预警雷达能量资源。
1.2.2 交班策略
按照以上交班条件,预警雷达的交班策略需要从空间维、时间维和能力维综合考虑,如图1所示。

图1 交班策略二维解析图
(1)交班距离选取(空间维)。就是在预警雷达探测能力范围内,选择合适的交班距离门限。目标太近或太远时交班,可能浪费时间和能量资源,甚至影响多功能雷达截获性能。
(2)交班时刻选取(时间维)。原则上,预警雷达应该在目标飞行前半段交班,而前半段在交班时刻选取上怎么体现,这也是预警雷达交班时机选择时需要权衡的重要方面。
(3)交班精度条件设置(能力维)。由于预警雷达的引导信息对于多功能雷达目标截获性能的影响很大,理论上讲,预警雷达的引导信息越精确,多功能雷达截获目标所需耗费的时间和能量资源就越少。但是,由于目标飞行距离等条件制约,需要通过合理限定预警雷达的交班精度下限,确保尽快完成交班。
因此,预警雷达的任务交班策略就是对目标剩余飞机距离、剩余飞行时间和目标引导精度的平衡优化。交班策略研究就是在图中的三维问题空间中选取或探索最佳位置点,支持预警雷达最佳交班时机选择。
2 任务交班仿真设计
2.1 仿真基本流程
预警雷达任务交班仿真的目的是在基于一定导弹防御想定,进行预警雷达交班时刻和交班数据的仿真推演和计算,以支持多个交班策略方案的对比和优化。预警雷达任务交班仿真基本流程如图2所示。

图2 预警雷达任务交班仿真流程
预警雷达任务交班仿真的基本流程:进行目标截获仿真,得到预警雷达截获目标时刻数据;设置和生成预警雷达交班限定条件;从预警雷达截获目标时刻点,按照一定采样步长推进仿真时钟,依次遍历后续弹道数据;仿真时钟每推进一步,依次判断时间、距离和精度条件,当且仅当所有条件都满足交班限定条件时,该时刻确定为交班时刻;输出预警雷达交班时刻和交班数据,仿真结束。
2.2 仿真模型框架
由以上预警雷达任务交班仿真流程,仿真推演的实现需要交班条件设置、目标剩余飞行距离解算、目标剩余飞行时间解算、目标跟踪滤波等仿真模块,由此构成仿真模型体系,如图3所示。
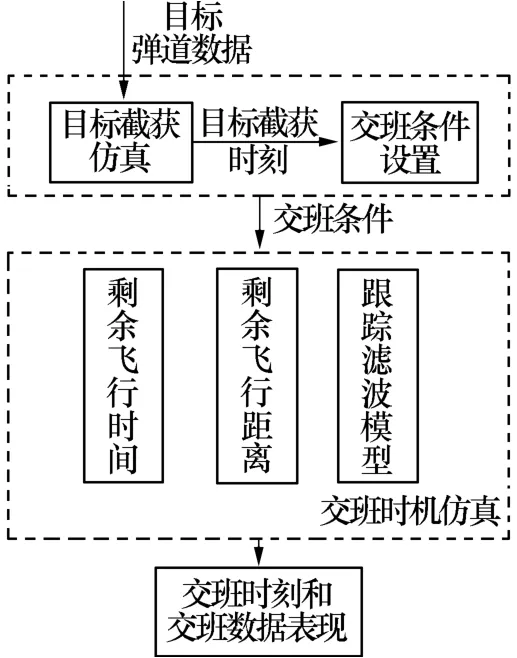
图3 仿真模型构成图
其中,目标截获仿真模块由目标弹道仿真数据得到预警雷达的目标截获时刻;交班条件设置模块用于设置包括时间、距离和引导精度的交班限定条件;剩余飞行时间模块用于计算当前仿真时刻的目标剩余飞行时间;剩余飞行距离模块用于计算当前时刻目标剩余飞行距离;跟踪滤波模块用于计算当前时刻目标测量数据和跟踪精度;交班和交班数据表现模块用于输出并用图表等方式进行仿真结果表现。
2.3 仿真数学模型
2.3.1 目标剩余飞行时间解算模型
目标剩余飞行时间求解的关键在于估算弹道导弹的飞行时间,则剩余飞行时间为目标飞行时间和当前仿真时间的差值。假设导弹发射时刻为0,目标剩余飞行时间为

弹道导弹的飞行时间估算方法为

式中:π 为圆周率;δF、αF为发射点的赤经纬度;δL、αL为落点的赤经纬度;β为发射点到落点的地心弧;fK为关机点的真近点角;f0为发射点的真近点角;EK为关机点偏近地点角。设tK为关机点时间,vBM为弹道导弹的平均速度,则导弹飞行时间为

2.3.2 目标剩余飞行距离解算模型[4]
设预警雷达的坐标为O(0,0)目标在坐标系内投影的坐标为A(x,y),AC箭头指向为弹道导弹飞行轨迹,预警雷达对该目标的探测半径为Ri,D为目标到预警雷达的距离。通过几何关系,可以得到目标在预警雷达威力范围内的剩余飞行距离R,如图4所示。
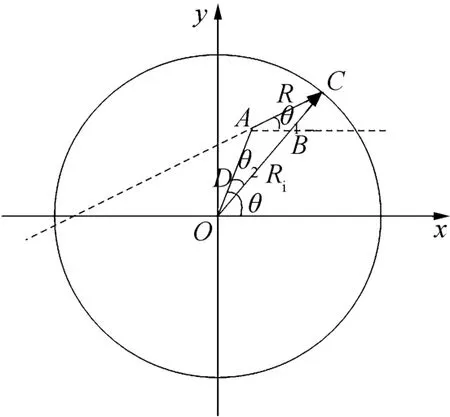
图4 目标剩余飞行距离估算示图
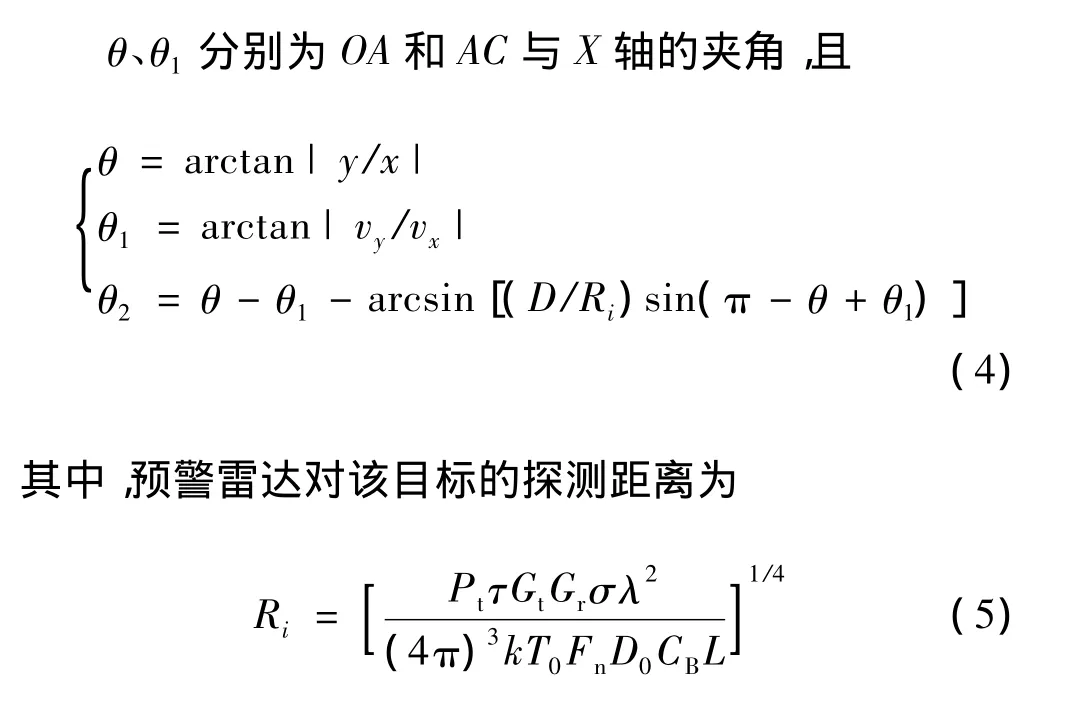
式中:Pt为雷达发射功率;τ为脉冲宽度;Gt为雷达天线增益;σ为弹道导弹的散射截面积;T0为标准室温,一般取290 K;Fn为接收机噪声系数;D0为累计M个脉冲后的检测因子D0(M);CB为带宽校正因子,CB≥1,它表示接收机带宽失配所带来的信杂比损失,匹配时CB=1;L为雷达各部分损耗引入的损失系数。经推导得

当满足条件R≤αR,0<α<1(其中,α的值一般是由专家打分法获得),则满足剩余飞行距离交班条件。
2.3 .3 跟踪滤波模型[5]
预警雷达对目标的跟踪滤波仿真可采用扩展卡尔曼滤波结合最小二乘批处理方法,可有效提高目标跟踪数据的精度和稳定性。
设 r=(X,Y,Z),r=‖r‖,以惯性坐标系为参考坐标系,目标的运动方程可表示为
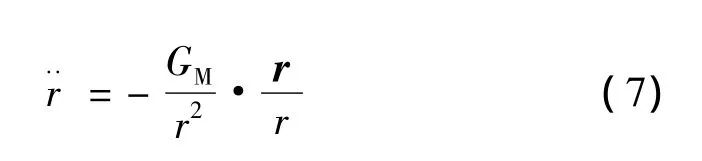
式中:GM为地球引力常数。

式中:A为系统转移矩阵;C为观测矩阵;wi为白噪声矢量;ei为观测噪声矢量。
设定雷达观测误差服从高斯分布,则目标状态滤波可按照扩展卡尔曼滤波方程进行状态预测和更新[7]。利用卡尔曼滤波可以得到状态估计和协方差为
在卡尔曼滤波的基础上,可以通过数据平滑来消除随机误差的影响,提高跟踪滤波精度。
3 任务交班柔性仿真建模
3.1 柔性仿真建模方法
柔性仿真建模就是利用灵活可重配的建模单元,通过恰当接口设计和属性配置,类似“搭积木”的方式构建仿真模型[8-9],从而仿真模型设计可简化为建模单元的选取或设计问题,已有的建模单元可以重用,无需重新设计。并且可以根据新的仿真需求不断填充和完善仿真模型单元库,灵活方便和更新和扩展仿真模型。柔性仿真建模的特点在于扩展性、重用性和灵活性,使得仿真模型具有这些特征的关键在于仿真建模单元。
常用的仿真建模方法,如 EULER网、Petri网、SYSML等方法,这些方法语意规范,建模支持工具也比较完备,但建模人员的学习周期较长,所建模型也不够通俗,不易理解,模型的直观性不够。本文采用基于算子的柔性仿真建模方法,就是将算子作为基础建模单元,构建树状结构的仿真模型。由于树状结构对于层次化、流程化的仿真问题具有较好的表现能力,算子树仿真模型构建不仅简单灵活,所建模型也易于理解,直观明了。
3.2 仿真模型构建
根据以上仿真流程和模型框架,设计预警雷达目标探测仿真算子模型单元集合。包括交班条件设置、预警雷达引导精度需求分析、剩余飞行时间设置、剩余飞行距离设置、剩余飞行距离计算、剩余飞行时间计算等12个算子模型单元构成,如图5所示。

图5 任务交班仿真建模单元设计
按照仿真基本流程,这些建模单元进一步分为如下三类:
(1)数据汇总类。主要包括交班条件设置和交班时机选择两个算子,用于容纳交班条件设置和交班时机判断相关算子,并汇总输出相关数据。
(2)交班条件设置类。依据以上交班策略,从时间维、空间维和能力维考虑交班条件,对应为三个具体的算子模型单元,用于设置或分析时间、距离和精度的判断门限。
(3)交班时机仿真类。包括时间、距离和精度三个交班时机解算算子,封装以上仿真数学模型,基于相应的交班条件从不同维度求解对应的交班时刻数据,供交班时机选择算子进行综合权衡。
仿真建模单元设计完成后,集成在柔性评估模型系统(Flexible Evaluation Modeling System,FEMS)中,并选取该系统中的弹道仿真相关建模单元,构建仿真推演的导弹目标仿真模型,通过添加和配置设计好的任务交班仿真模型单元,即可建立预警雷达任务交班仿真模型,如图6所示。
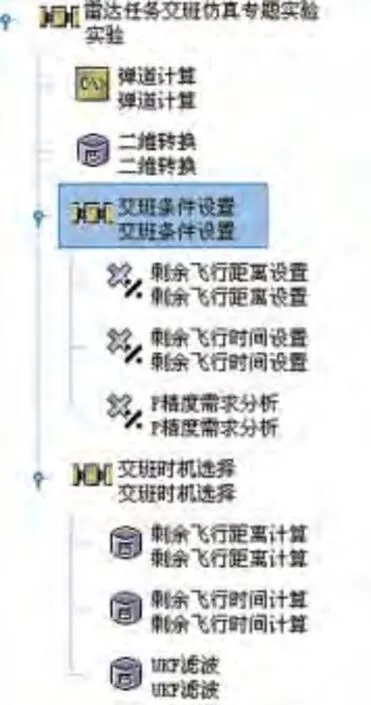
图6 预警雷达任务交班仿真模型
图6中,弹道计算和二维转换两个模型单元,用于生成典型弹道目标的弹道经纬度数据;交班条件设置等四个模型单元,用于时间、距离和引导精度交班条件的设置;交班时机选择等四个模型单元用于交班时机仿真解算。可见,该模型的外观与仿真流程有较高的一致性,易于理解,而且这些模型单元的仿真条件都是灵活可调和可控的,可以根据需要调整模型结构和配置模型构件。
3.3 仿真实验
实验想定:弹道导弹为射程为2 000 km的中程弹道目标,发射点地理坐标为东经84°,北纬31°,落地点地理坐标为东经97°,北纬35°,飞行时间约731 s。预警雷达部署在东经118.3°,北纬32.4°,最大作用距离为3 300 km,负责对该弹道导弹飞行区域目标进行早期预警。
仿真条件:主要包括弹道仿真参数、预警雷达跟踪参数、交班条件等仿真配置,见表1、表2。
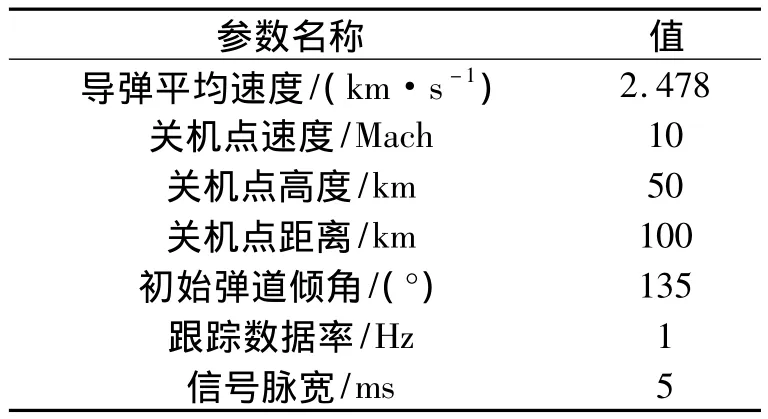
表1 弹道仿真参数和P跟踪参数
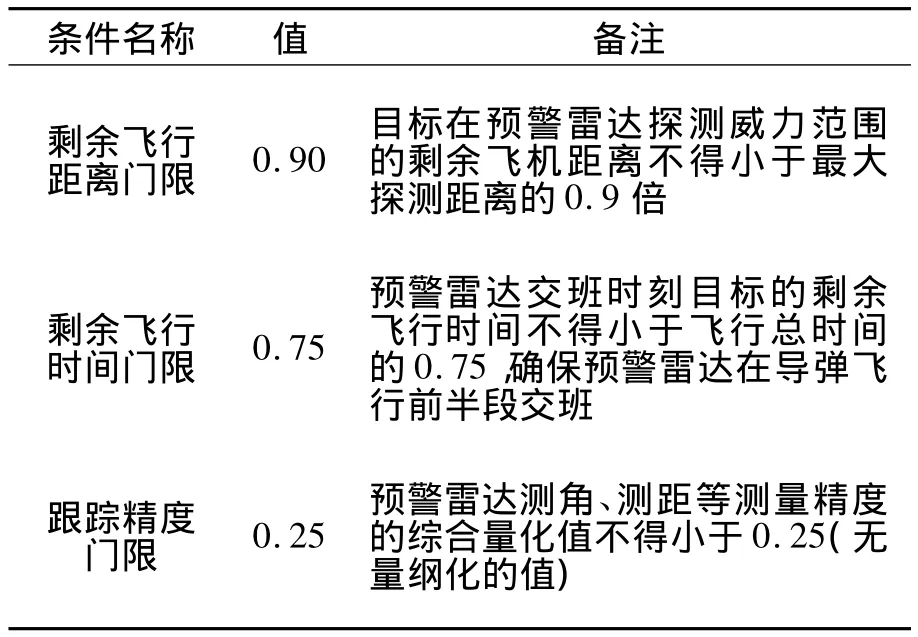
表2 预警雷达交班条件设置表
在FEMS仿真环境下启动仿真引擎,执行任务交班算子树模型,得到预警雷达交班时刻的输出结果。该仿真结果表明,按照仿真设置的交班条件,预警雷达在导弹飞行183 s时交班,正好是导弹飞行的前半段,与实际情况比较吻合,有效验证了模型的有效性和可行性。
4 结束语
本文提出的导弹防御预警雷达交班准则、交班条件和交班策略研究框架,具有导弹防御效能验证、反导指挥决策等相关研究有很好的借鉴和参考意义。构建的预警雷达任务交班仿真模型,可用于预警雷达作战使用研究、导弹仿真雷达交接班效能验证等,可作为重要仿真模块接入导弹防御系统效能仿真系统。下一步的工作包括:预警雷达任务交班仿真实验框架设计;预警雷达交班策略仿真实验分析等。
[1] 王盛超,李 侠,王 松,等.BM早期预警相控阵雷达跟踪能力分析[J].舰船电子工程,2012,32(10):71-73.Wang Shengchao,Li Xia,Wang Song,et al.Tracking ability analysis of phased-array radar for BM early-warning[J].Ship Electronic Engineering,2012,32(10):71-73.
[2] 赵 锋,李 盾,王雪松,等.导弹防御雷达仿真系统[J].系统仿真学报,2006,18(5):1190-1194.Zhao Feng,Li Dun,Wang Xuesong,et al.Missile defense radar simulation system[J].Journal of System Simulation,2006,18(5):1190-1194.
[3] 乔永杰,刘金荣,李承延,等.导弹探测系统发现概率的建模[J].系统工程与电子技术,2011,33(10):2244-2248.Qiao Yongjie,Liu Jinrong,Li Chengyan,et al.Detection probability modeling for missile detection systems[J].Systems Engineering and Electronics,2011,33(10):2244-2248.
[4] 孙泾彤,刘 健,刘 毅.区域防空组网雷达对跟踪目标交接班模型研究[J].航空计算技术,2007,37(1):34-36,40.Sun Jingtong,Liu Jian,Liu Yi.Research of the tracking target mission shifting model of netted radar in a theater air defense[J].Aeronautical Computer Technique,2007,37(1):34-36,40.
[5] 刘华军,张荣涛,耿党辉.组网雷达跟踪弹道导弹的交接班模型研究[J].现代雷达,2009,31(6):20-23.Liu Huajun,Zhang Rongtao,Geng Danghui.A study on mission shifting model of netted radars for tracking ballistic missiles[J].Modern Radar,2009,31(6):20-23.
[6] 张华睿,杨宏文,胡卫东,等.警戒雷达与跟踪雷达的目标指示交接方法[J].现代雷达,2011,33(9):19-24.Zhang Huarui,Yang Hongwen ,Hu Weidong,et al.Target cueing and handoff method of two-dimensional early warning radar and tracking radar[J].Modern Radar,2011,33(9):19-24.
[7] 张光义,王德纯,华海根,等.空间探测相控阵雷达[M].北京:科学出版社,2001.Zhang Guangyi,Wang Dechun,Hua Haigen,et al.Phased array radar for space detection[M].Beijing:Science Press,2001.
[8] Skolnik M I.Radar handbook[M].2nd ed.New York:McGraw-Hill Publishing Company,1990.
[9] 王维平,李 群,朱一凡,等.柔性仿真原理与应用[M].长沙:国防科学技术大学出版社,2003.Wang Weiping,Li Qun,Zhu Yifan,et al.Flexible simulation theory and application[M].Changsha:National Universtiy of Defense Technology Press,2003.
猜你喜欢
中国卫生标准管理(2021年21期)2021-12-02
智慧健康(2019年34期)2019-12-20
电子制作(2019年15期)2019-08-27
今日农业(2019年12期)2019-08-13
小学生学习指导(低年级)(2018年12期)2018-12-29
当代医药论丛(2018年6期)2018-05-23
现代园艺(2017年22期)2018-01-19
火控雷达技术(2016年3期)2016-02-06
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07