对《理论力学教程》中一个问题的再讨论
2015-03-01 03:27尹海峰
物理与工程 2015年2期
尹海峰
(凯里学院物理与电子工程学院, 贵州 凯里 556011)
对《理论力学教程》中一个问题的再讨论
尹海峰
(凯里学院物理与电子工程学院, 贵州 凯里556011)
摘要关于“一张错误的插图”问题,文献[1-3]对经典教材《理论力学教程》中描述刚体平面平行运动的公式(3.7.3)的理解有误. 教材中公式(3.7.3)是刚体上任一点的速度在动坐标系中的分量形式. 由于对坐标系与参考系概念的区分不清楚,参考文献[1-3]的作者以及部分学生和教师认为动坐标系是在转动参考系中建立的. 本文作者认为研究刚体平面平行运动的3.7节没有选择转动参考系;为了研究的方便,以地面为参考系中建立了两个坐标系来描述刚体的平面平行运动.
关键词运动学;参考系;坐标系
REDISCUSSION OF ONE PROBLEM IN “THEORETICAL MECHANICS TUTORIAL”
Yin Haifeng
(College of Physics and Electronic Engineering, Kaili University, Kaili, Guizhou 556011)
AbstractRegarding “an error illustration” problem, references [1-3] misunderstand the formula (3.7.3), which describes the plane parallel motion of rigid body, in classic textbook “theoretical mechanics tutorial”. The formula (3.7.3) of classic textbook is the velocity component of anyone point of rigid body in the moving coordinate system. Because of the unclear distinguishing of coordinate system and reference system, authors of references [1-3], some students and teachers think the moving coordinate system is established in the rotating reference. In this paper, we think rotating reference is not chosen in 3.7 section, which study the plane parallel motion of rigid body. For the convenience of research, taking the ground as a frame of reference, two coordinate systems are established to describe the plane parallel motion of rigid body.
Key wordskinematics; frame; coordinate system
《物理与工程》第16卷第5期、第18卷第3期和第22卷第2期,分别刊登了“对《理论力学教程》中两个问题的讨论”[1]和“对‘对《理论力学教程》中两个问题的讨论’一文的质疑”[2]以及“关于‘对《理论力学教程》中两个问题的讨论’的讨论”[3]3篇文章(以下分别简称“文章一”、“文章二”和“文章三”). 仔细研读3篇文章后发现,对于“一张错误的插图”问题,3篇文章作者对周衍柏先生编著的经典教材《理论力学教程》[4]中相应部分内容的理解不全面或者有误. 同样考虑到周先生的教材影响面比较大,目前仍被许多高校采用,因此,对于该问题的继续探讨,就显得非常必要和有意义. 本文再次对“一张错误的插图”相关问题展开讨论.
1教材中的插图
《理论力学教程》教材中插图3.7.2(如图1所示),涉及刚体的平面平行运动[4].
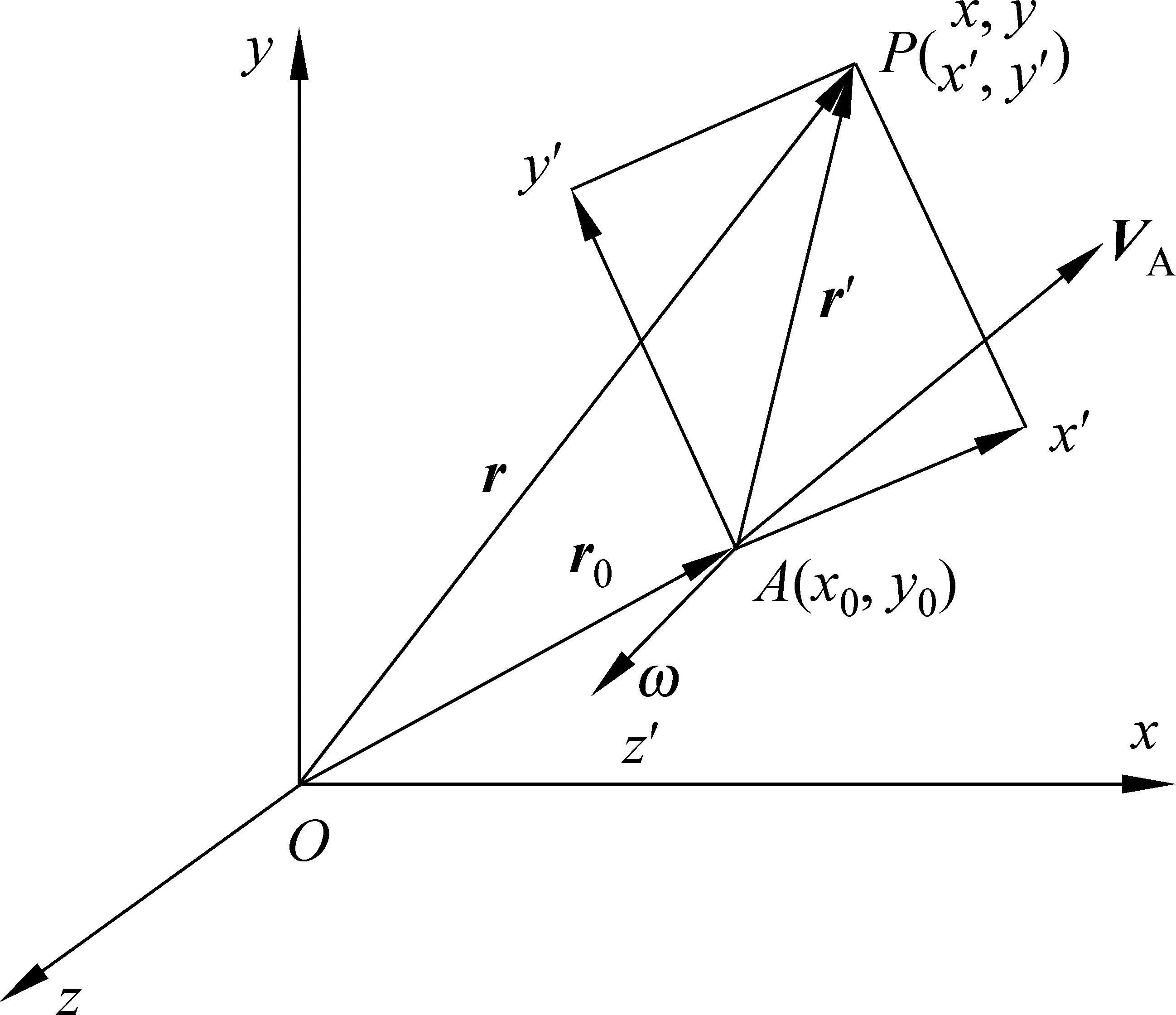
图1 《理论力学教程》中插图3.7.2
当刚体平面平行运动时,可以认为它的运动是随基点的平动以及绕基点的转动这两种基本运动所合成. 设A为基点,在某一时刻,其速度为VA,又在此时刻,薄片(即刚体)绕转动的角速度为ω,则薄片上任一点的速度(见图1)为

(1)
式中,r′为P对A的位矢,r为P对固定坐标系原点O的位矢,而r0为基点A对O的位矢,故ω×r′是P点绕A点转动的速度.
设P相对于固着在固定平面上的坐标系O-xy而言,其坐标为(x,y);相对于固着在薄片上并随薄片一同运动的坐标系A-x′y′而言,其坐标为(x′,y′);而A相对于O-xy系的坐标为(x0,y0).因ω恒垂直于固定平面和薄片,即沿z和z′轴,故式(1)的分量表达式相对于O-xy系和相对于A-x′y′分别为
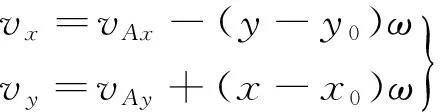
(2)

(3)
23篇文章对于插图的分析
文章一对周先生教材中图3.7.2提出的问题是: 图1与公式(2)和(3)(即分别为周先生教材中的(3.7.2)和(3.7.3)两公式)相矛盾[1]. 文章一还认为: “如果选择固连于薄片的坐标系A-x′y′,那么该动坐标系为转动参照系,应该属于该教材后面一章的内容. 显然本章应用的仍是该教材第一章平动参照系中的知识,即P点的绝对速度等于牵连速度加上在平动参照系A-x′y′中的相对速度.”
文章二指出,文章一中“图1与公式(2)和(3)(即分别为周先生教材中的(3.7.2)和(3.7.3)两公式)相矛盾”这一结论是错误的;文章一提到的关系式y-y0=y′和x-x0=x′,在周先生的教材中是不存在的,更为重要的是这两个关系式也是错误的[2]. 同时,文章二引入了“本体坐标系”,认为: “周先生的教材中在讨论刚体平面平行运动时已将该运动等效为基点的平动加绕基点的转动这两部分运动的叠加. 这样,如果取本体坐标系,刚体的转动就可以等同于本体坐标系相对于空间坐标系的转动”.
文章三同样认为,文章一中的结论“图1与公式(2)和(3)(即分别为周先生教材中的(3.7.2)和(3.7.3)两公式)相矛盾”和文章一中的观点“在研究刚体的平面平行运动的3.7节,不用选择固连于刚体的转动参照系,宜采用平动参照系”都是错误的. 同时,文章三提出: “选择转动参照系是研究刚体的平面平行运动的转动瞬心、本体极迹的需要.事实上《理论力学教程》正是利用式(3.7.3),令,得到‘转动瞬心在A-xyz系中的坐标’”.
3对于原问题的分析
对于教材中所涉及的刚体平面平行运动部分的讨论,文章一、文章二、文章三以及部分学生和教师对于坐标系与参照系概念的区分不清楚. 文章一认为: “如果选择固连于薄片的坐标系A-x′y′,那么该动坐标系为转动参照系,应该属于该教材后面一章的内容”. 这种把坐标系等同于参照系的认识是错误的. 文章二虽然认为文章一中“转动参照系应该属于该教材后面一章的内容”的观点过于牵强,但是并没有对坐标系与参考系概念进行区分. 文章三,同样存在对于坐标系与参考系概念区分不清楚的问题. 对于经典力学,选择不同的参考系,物体的运动规律会有所不同(比如物体的轨道形状取决于参考系的选取);但是对于相同的参考系,物体的运动规律与选择的坐标系无关,即物体的运动规律与选择的“静止”直角坐标系、“转动”极坐标系和“动”自然坐标系无关.
参考文献[1-3]以及部分学生和教师,对于教材中刚体平面平行运动部分公式(3) (即周先生教材中 (3.7.3)公式)的理解不全面或者有误. 这主要是由于,他们认为动坐标系A-x′y′是在转动参考系中建立的. 实际上,笔者认为周先生教材中的坐标系O-xy和坐标系A-x′y′都是在同一个参考系中建立的,即可以认为都是在以地面为参考系中建立的. 若坐标系A-x′y′是在固连于刚体的转动参考系中建立的,则刚体相对于转动参考系静止,即刚体上的任意一点P在坐标系A-x′y′中始终静止;在任意时刻P点的速度都为零,即vx′=0,vy′=0. 坐标系O-xy与坐标系A-x′y′的关系,类似于在同一个参考系中建立的直角坐标系和自然坐标系的关系. 相对于同一个参考系,公式(2)和(3) (即分别为周先生教材中的(3.7.2)和(3.7.3)两公式)分别是P点的速度在静坐标系o-xy和动坐标系A-x′y′中的分量形式. 在任意时刻,不同坐标系中P点的速度方向相同,大小也相同). 以地面为参考系建立的动坐标系A-x′y′,是研究刚体的平面平行运动的转动瞬心、本体极迹的需要. 在不同时刻t,动坐标系A-x′y′的坐标轴方向会有所不同. 在时刻t,坐标系A-x′y′的坐标轴方向是一定的,周先生教材中刚体平面平行运动部分公式(3.7.3)考虑的是,在时刻t,以地面为参考系,P点的速度v在坐标系A-x′y′中的分量形式.
[1]吕刚,宫衍香.对《理论力学教程》中两个问题的讨论[J].物理与工程,2006,16(5):56-58.
[2]鞠国兴. 对“对《理论力学教程》中两个问题的讨论”一文的质疑[J].物理与工程,2008,18(3):60-64.
[3]蒋小勤. 关于“对《理论力学教程》中两个问题的讨论”的讨论[J].物理与工程, 2012,22(2):1-3.
[4]周衍柏.理论力学教程[M].3版. 北京:高等教育出版社,1986:144-150.
■
作者简介:尹海峰,男,副教授,主要从事理论物理的教学和研究工作,研究方向为纳米材料的光学特性.yinhaifeng1212@126.com
基金项目:贵州省2013年物理学专业综合改革试点项目,凯里学院原子与分子物理重点学科项目,国家自然科学基金(批准号:11464023).
收稿日期:2014-10-02
猜你喜欢
导航定位学报(2022年2期)2022-04-11
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
新课程·下旬(2018年7期)2018-01-19
中学物理·高中(2016年1期)2016-05-26
肇庆学院学报(2016年5期)2016-03-11
海军航空大学学报(2015年1期)2015-11-11