
改进的变步长自适应谐波检测算法
2015-03-04 07:05单锦宁李国华
电力系统及其自动化学报 2015年5期
乔 和,刘 阳,单锦宁,李国华
(1. 辽宁工程技术大学电气与控制工程学院,葫芦岛125105;2.国网辽宁省电力有限公司阜新供电公司,阜新123000)
随着非线性电力电子产品在各个领域的广泛应用,电力系统受谐波污染日益加剧,对电力系统的安全、经济、稳定等方面造成了严重的影响。为了建设“绿色电网”,电力系统谐波治理已成为国内外重要研究课题[1-10]。目前的谐波检测方法按原理可分为:基于傅里叶变换的谐波检测法;神经网络的谐波检测法;基于瞬时无功功率理论的谐波检测法;小波分析的谐波检测法和自适应谐波检测法。这些谐波检测方法均为谐波治理做出卓越贡献,但是其自身缺陷也制约了谐波检测的进一步发展。
文献[4]采用基于傅里叶变换的谐波检测法,其优点是算法比较成熟,应用比较广泛,但是其存在延时、栅栏效应和频谱泄漏等缺点;文献[6]提出一种自适应谐波检测方法,该算法对电网各项参数变化具有较强的自适应能力,但是其步长不易选取;文献[7]采用神经网络谐波检测法,其优点是可以单步推出各次谐波分量,缺点是建模复杂,在进行谐波分析时容易陷入局部最优解;文献[10]采用基于瞬时无功功率理论检测算法,优点是延时小、电路简单、实时性好,缺点是存在一定的缺陷和局限性,低通滤波器的设计参数选取较为困难,计算量较大,运算复杂。
本文提出了一种改进的变步长自适应谐波检测算法,首先利用滑动积分器代替自适应滤波器提取真正误差,然后利用带有自调整因子的模糊调整器来调整步长,使稳态精度与收敛速度俱佳。利用非均匀量化的清晰化和模糊化规则,简化模糊调整系统,使模糊理论的非线性映射能力和自调整、自适应理论学习能力增强。
1 基于自适应对消原理的谐波检测算法
假设电源电压理想且无畸变,即

将非线性负载电流用傅里叶级数展开为
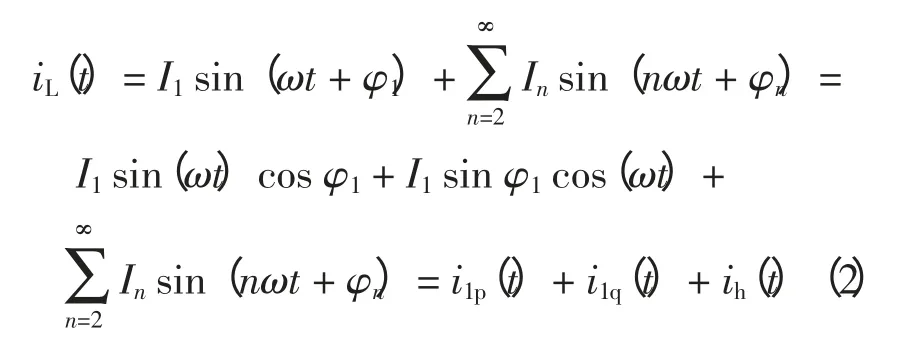
式中:i1p(t)为基波有功电流;i1q(t)为基波无功电流;ih(t)为高次谐波电流。由此得畸变电流id(t)为

图1 为基于自适应对消原理的谐波检算法。其核心思想为:基本信号iL为电路中通过负载的电流,其中包含基波电流信号i1以及谐波电流ih;参考信号是与电网同步锁相的标准正余弦信号x1、x2。将iL(t)作为原始输入,其中的i1(t)看作噪声部分,而id(t)看作信号部分;将参考输入同电网信号进行锁相同步后,输出为标准正弦采样信号,将其与自适应滤波器相加后,输出可变基波有功电流i1p′(t)以最小均方差最终逼近i1p(t),然后和iL(t)相减,系统的输出可变的畸变电流id′(t)也以最小均方差逼近所要检测的id(t),即id(t)为调节权值ω所需要的误差信号e(t)。
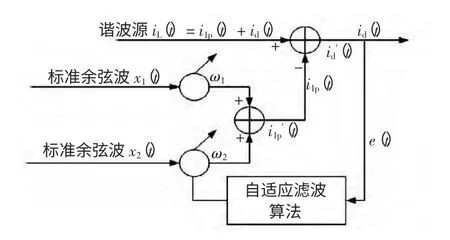
图1 基于自适应对消原理的谐波检测算法Fig.1 Harmonic detection algorithm based on adaptive cancellation principle
2 基于模糊调整的变步长自适应谐波检测原理
将上述算法应用到有源电力滤波器中检测该算法的可行性,但实验结果并不理想。分析表明,传统定步长的最小均方LMS(least mean square)算法由于它的内部局限性,限制了动态响应速度与稳态精度的兼顾。
为解决传统定步长算法的不足,变步长LMS算法的提出将会同时满足稳态精度与收敛速度的要求。变步长LMS 算法基本思想如下:当权系数远离最佳权值ω*时,将选取较大的步长μ,以加快对时变系统的跟踪速度,使其有较好动态响应速度;当权系数接近最佳权值ω*时,则选取较小步长μ,这样可以使稳态误差较小,满足精度的要求。步长μ 的选择多是依据自适应滤波器中某些参数的更新作为衡量标准。但是在实际谐波检测中,反馈误差e(t)中的谐波电流对滤波器的滤波性能有严重的影响,其主要表现在使衡量不同步长调整表达式的值误差较大。因此需要从反馈误差e(t)中寻求真正能调节系统步长迭代的衡量参数。在此基础上,针对谐波检测在实际中的应用,本文所提改进的变步长自适应谐波检测算法利用滑动积分器代替自适应滤波器,通过积分求和过程来实现对真正跟踪误差的提取;利用模糊调整系统,动态调整步长,使其同时满足稳态精度与动态响应速度的要求。
2.1 模糊自适应谐波检测算法
从图1 可以看出,误差e 的表达式为

滤波器真正跟踪的误差是c(t),而不是e,通常用e 作为依据来调节步长是不适合的。
将式(4)进一步推导,可得e 的具体表达式为

将e 与电网同步锁相信号相乘,便可以从总的误差信号中提取真正的跟踪误差c(t),即

式中:E′为直流分量,包含可调因子ω;ζ 为交流干扰信号,不含可调因子ω。故直流分量E′是反映系统真正的跟踪误差。从总的信号里提取出直流分量E′的方法有2 种,一种是采用低通滤波器,滤波器的时延效应会让跟踪效果滞后,影响动态响应速度;另一种是积分求和。对式(6)进一步化简可以看出,干扰交流信号ζ 的谐波次数均为偶数,由对称性可知电网周期将会缩短,因此基于积分器的变步长算法在性能上是比较理想的。
为了进一步验证积分器所带来的延时大小,本文设计了滑动积分器算法,其滑动积分器为
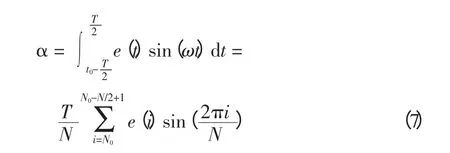
式中:N 为1 个电网周期T 中的采样个数;t0当前时刻;N0为最新时刻的采样点。将式(7)化简,得

从式(8)可以看出,积分结果α 与E′只差一个常数系数T/2,很容易将其还原为E′。
为了将该算法移植到数字信号处理器DSP(digital signal processor)中实现,首先对式(8)进行离散化处理,然后进行积分求和,结果为
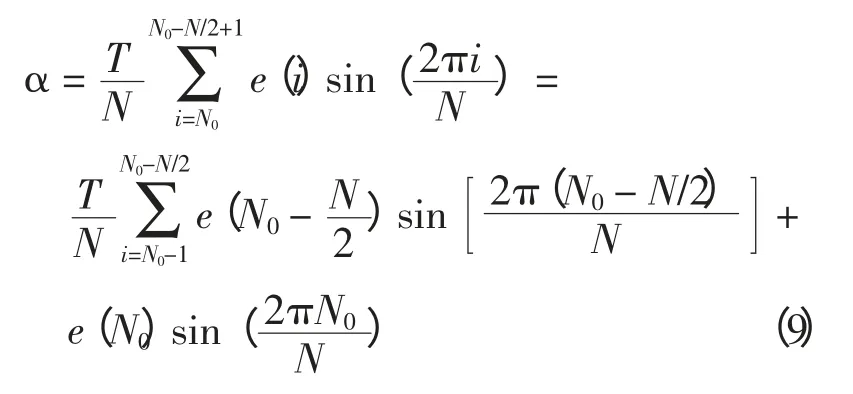
由式(9)可知,系统只在初始化的半个工频周期进行求和计算,以后的求和积分变成了一个加法与减法的计算,计算量大大减少,并且实现滑动效果,从而提高系统的实时性与快速性。
2.2 模糊变步长推理系统
为了使自适应网络学习过程中的误差e 与E′以最快速度减小,本文引入模糊调节器。模糊调节器是以模糊推理系统为基础建立起迭代步长与系统输出性能指标之间的非线性联系。变步长模糊推理系统是根据误差E′的不同变化趋势来确定相应的步长μ,而E′的变化趋势则可以用其一阶导数来判断。故本文的模糊变步长推理系统的输入为误差E′及其一阶导数E˙′,输出为步长μ,如图2 所示。
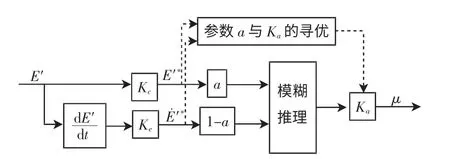
图2 带有自调整因子的步长模糊调整器Fig.2 Fuzzy step-size regulator with self-adjusting factors
输入量E′与dE′/dt 由普通论域转换到模糊论域为E′*、E˙′*,Ke与Kc是量化因子。将模糊调整系统的输入、输出论域定义为[-N,N]。Ke和Kc将误差E′和误差变化率dE′/dt 由基本论域(连续)变换到模糊论域(离散),从而实现模糊化过程。比例因子Ka的值在模糊控制器中直接影响到控制器的输出值,因此Ka的调整在清晰化过程中很关键。参数与Ka的寻优是实现非均匀量化规则的过程,通过a 与Ka的非线性关系,对变量进行粗分和细分,简化隶属函数的过程。其采用的带有自调整因子的模糊调整规则可以表示为

其中

式中:a0和an为常数,0 ≤an≤a0≤1;a 为自调整因子,a∈[an,a0];N1为量化等级常数;E′*与E˙′*分别为E′和E˙′的模糊量。
由式(10)可知,步长μ 的变化由E′*和E˙′*决定,a 值决定了E′*、E˙′*在步长μ 中的比例。式(11)为a 的调整式,当E′*增大时,a 将会增大,步长μ中的E′*比例随之增加,表明权值ω 远离最佳权值ω*,此时需加大步长,加快对时变系统的跟踪速度,因此误差E′中的权重应取得比较大;当E′*减小时,a 将会减小,步长μ 中E′*比例随之减小,表明权值ω 接近最佳权值ω*,应尽量保证避免超调,因此误差E′中的权重应取得比较小。
3 仿真验证
将本文所提改进的自适应谐波检测算法在Matlab 中进行仿真,以证明该算法理论的可行性。仿真结果如图3~图7 所示。

图3 非线性负载电流波形Fig.3 Nonlinear load current waveform
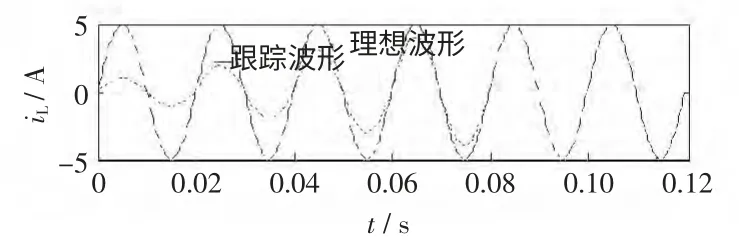
图4 传统定步长0.005 时算法的跟踪对比波形Fig.4 Tracking contrast waveforms of conventional fixed step-size 0.005 method
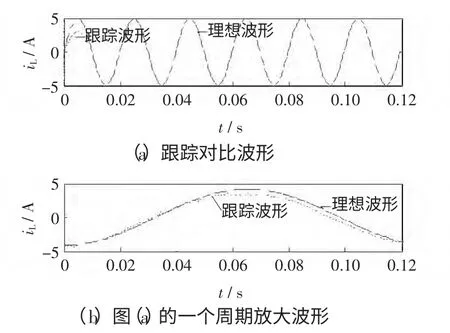
图5 传统定步长(0.1)算法跟踪对比波形Fig.5 Tracking contrast waveforms of conventional fixed step-size 0.1 method
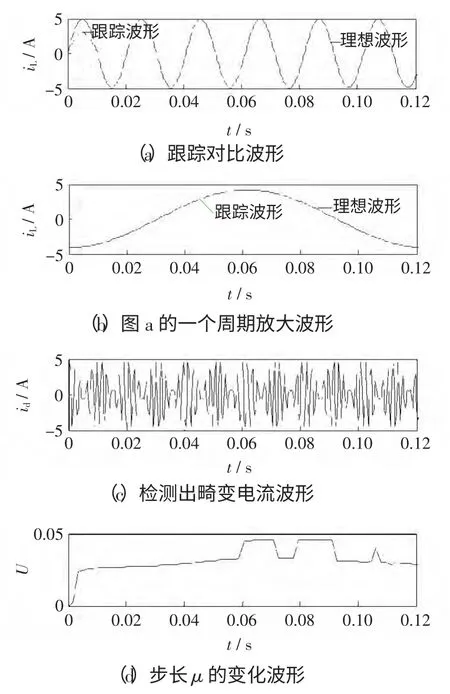
图6 基于滑动积分器变步长算法仿真波形Fig.6 Simulation waveforms of variable step-size algorithm based on sliding integrator
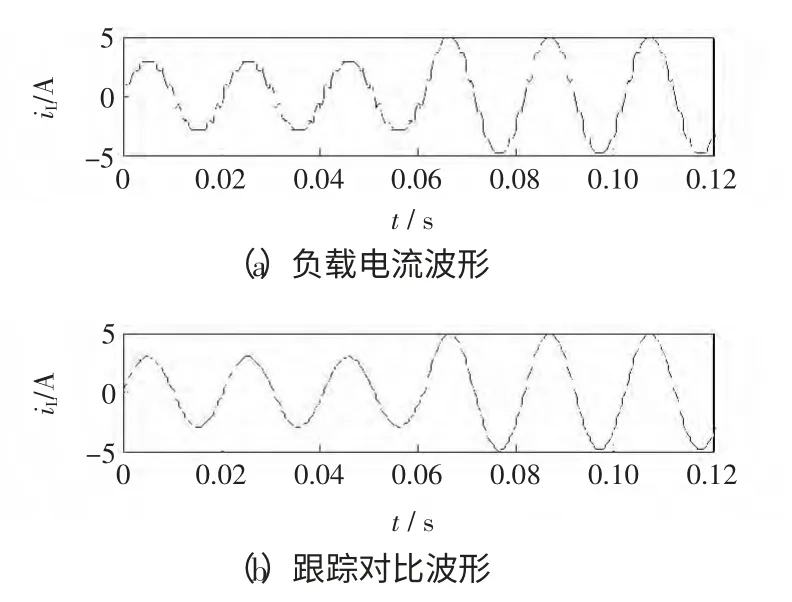
图7 负载突变时跟踪波形Fig.7 Tracking signals waweforms during abrupt change of load
图3为非线性负载电流波形,其谐波次数主要为11 次和13 次。图4 为步长为0.005 的传统算法波形,其稳态精度较高,但是收敛速度慢,需4个电网周期。图5 为步长为0.1 的传统算法波形,其收敛速度较快,半个电网周期即可,但是稳态精度较差。从图5(b)可以看出,检测波形与理想波形一直存在稳态误差,而且检测波形中含有一定的电流畸变,并且畸变量较大。图4 和图5 证明了传统定步长算法无法兼顾稳态误差与收敛速度。
图6 所示为本文提出的含有滑动积分器的变步长算法仿真波形。由图6(a)看出,收敛速度较快,半个电网周期即可;图6(b)则说明了稳态误差较小,而且无畸变电流;图6(d)为步长变化趋势,步长较大时,说明收敛速度快;步长较小时,则为稳态误差较小。因此图6 说明了基于滑动积分器的变步长算法可以很好地兼顾稳态精度与收敛速度,使两者达到俱佳,从而证明了该算法的有效性。
图7 是基于滑动积分器的变步长检测算法在负载电流突变时的跟踪波形。由图7(a)可以看出,在0.06 s 时负载谐波电流发生突变;图7(b)为谐波电流的跟踪波形,在电流突变瞬间,跟踪波形产生误差,通过动态调整步长,使其稳态误差减小,同时加快动态响应速度,实时、快速、准确地跟踪基波有功电流变化。仿真结果证明了该算法具有较强的鲁棒性。
4 实验结果
为了验证该算法在实际谐波检测中可行性,将该算法运用到有源电力滤波器中。其主控芯片采用TMS320F2812,在C 语言环境下进行编程。其中图8 为在样机中得到的波形。图9 为在DSP 内存中得到畸变电流波形。图10 为负载电流突变时的检测波形图,由图10(b)可知该算法具有较好的动态响应速度。图11 为负载突变时,在DSP 内存中所得到的畸变电流波形。实验结果与仿真结果相一致,从而验证了该算法在实际谐波检测中的有效性。

图8 本文基于滑动积分器的变步长算法波形Fig.8 Waveforms of variable step-size algorithm in this paper based on sliding integrator

图9 检测出的畸变电流波形Fig.9 Distorted current waveform detected

图10 负载突变时检测波形Fig.10 Detected signals waweforms during abrupt change of load

图11 负载突变时检测出畸变电流波形Fig.11 Distorted current waveform detected during abrupt change of load
5 结论
(1)为了更好地提高自适应滤波算法的性能,提出一种改进的自适应谐波算法,该算法可同时获得良好的稳态精度与收敛速度。
(2)本文同时采用了滑动积分器代替自适应滤波器,可以避免谐波误差对自适应滤波器的影响,提高滤波性能,减小延时,体现该算法的快速性。
(3)该算法在负载发生突变时,仍可以实时、准确地跟踪时变系统,显示较好的鲁棒性与实时性。
[1]Wanger V E,Balda J C,Griffith D C,et al. Effects of harmonics on equipment[J].IEEE Trans on Power Delivery,1993,8(2):672-680.
[2]何娜,黄丽娜,武健,等(He Na,Huang Lina,Wu Jian,et al). 一种新型快速自适应谐波检测算法(A novel adaptive harmonic detection algorithm)[J]. 中国电机工程学报(Proceedings of the CSEE),2008,28(22):124-129.
[3]Mattavelli P,Marafao F P.Repetitive-based control for selective harmonic compensation in active power filters[J].IEEE Trans on Industrial Electronics,2004,51(5):1018-1024.
[4]张兰洋 (Zhang Lanyang). 一种基于FFT 的单相谐波检测方法的研究(A detecting method for harmonics in single-phase circuits based on FFT)[J]. 电气自动化(Electrical Automation),2013,35(2):95-98.
[5]郁祎琳,徐永海(Yu Yilin,Xu Yonghai). 变步长自适应LMS 有功电流检测方法研究 (Variable step-size adaptive active current detection method using LSM algorithm)[J]. 华东电力(East China Electric Power),2013,41(4):762-767.
[6]刘红梅 (Liu Hongmei). 自适应噪声对消滤波器的仿真及其FPGA 实现 (Simulation and FPGA Implementation of Adaptive Noise Canceling Filters)[D]. 长沙:湖南大学电气与信息工程学院 (Changsha:College of Electrical and Information Engineering,Hunan University),2012.
[7]张国荣,王英(Zhang Guorong,Wang Ying). 自适应神经网络在谐波电流检测中的应用(Application of adaptive neural networks in harmonic current detection)[J]. 电力系统及其自动化学报(Proceedings of the CSU-EPSA),2010,22(3):46-49,101.
[8]Marks J H,Green T C. Predictive transient -following control of shunt and series active power filters[J]. IEEE Trans on Power Electronics,2002,17(4):574-584.
[9]粟 梅,王 莉 娜,张 泰 山,等(Su Mei,Wang Lina,Zhang Taishan,et al).基于自适应滤波器的电网谐波电流预测法(Harmonic prediction method based on adaptive filter)[J]. 控制与决策(Control and Decision),2004,19(12):1429-1432.
[10]何益宏,卓放,周新,等(He Yihong,Zhuo Fang,Zhou Xin,et al). 利用瞬时无功功率理论检测谐波电流方法的改进(A modified method for measuring harmonic current based on instantaneous reactive power theory)[J]. 电工技术学报 (Transactions of China Electrotechnical Society),2003,18(1):87-91,71.
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
成都信息工程大学学报(2021年5期)2021-12-30
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
通信电源技术(2018年5期)2018-08-23
电测与仪表(2016年24期)2016-04-12
北京航空航天大学学报(2016年12期)2016-02-27
电测与仪表(2015年6期)2015-04-09
河北科技大学学报(2015年5期)2015-03-11
