
基于积分滑模的压机液压缓冲垫负载力控制
2015-03-09 03:32叶伟
机床与液压 2015年21期
叶伟
(太重集团榆次液压工业有限公司技术中心,山西晋中 030600)
基于积分滑模的压机液压缓冲垫负载力控制
叶伟
(太重集团榆次液压工业有限公司技术中心,山西晋中 030600)
针对压机液压缓冲垫负载力控制问题,提出一种基于积分滑模的鲁棒控制策略。该方法利用滑模控制鲁棒性强的优点,实现了缓冲液压垫负载力的精确跟踪控制,并且对系统中的参数不确定性和外部干扰具有较好的抑制作用。理论分析与仿真结果对比验证了该控制算法的有效性。
压机;缓冲液压垫;负载力;鲁棒
0 前言
近年来,随着我国汽车工业的飞速发展,大型冲压机作为生产大型汽车覆盖件必不可少的拉深设备,对汽车覆盖件尺寸形状精度、表面质量及加工效率的要求越来越高[1]。传统拉深工艺中原有的恒力、弹簧式缓冲方式,越来越无法满足生产实际的需求,数控液压垫缓冲技术作为一种新型的发展方向,逐渐成为机械压力机的重要组成部分,对提高拉伸质量,满足复杂工件不同拉延要求,延长设备使用寿命,提高设备利用率有重大贡献,已成为各国学者研究、关注的焦点[1]。
若薄板冲压过程中,缓冲力过小,则无法有效控制材料流动,板料容易起皱;压边力过大,虽可避免起皱,但材料拉破可能性会明显增加,同时模具和材料的表面受损可能性也相应增大,从而影响模具寿命和板料拉伸成型的质量[2]。因此变缓冲力控制在实际中得到广泛应用,即在薄板冲压过程中,在不同位置施加不同的缓冲力。采用这种变缓冲力控制技术不仅可以提高薄板成形性能,减少和消除成形过程中起皱和破裂,而且能提高冲压件的精度和稳定性[3-4]。因此,缓冲液压缸的力控制是数控液压垫的一项关键技术,力控制性能的优劣直接影响冲压件的成形品质[5],必须进行深入的研究。
对于缓冲液压缸力控制这样一个复杂的、动态耦合、具有时变的非线性系统,存在缓冲缸运动速度和缓冲力之间的耦合、伺服阀流量与压差关系非线性、油液弹性模量的变化,液压缸泄漏系数的变化,泵源压力的波动等不确定性因素[6-7],这些客观存在的实际情况使得控制系统性能变差,以致常规的反馈控制技术不能满足控制要求。为解决上述问题,本文作者提出了一种基于积分滑模的缓冲液压缸力控制策略,所设计的算法中,通过积分滑模对系统干扰进行观测,用于减小系统不确定性对力控制性能的影响并通过动态仿真来分析系统的动态特性。理论与仿真结果表明,所提出的算法能够在各种干扰和不确定下获得精确的力控制性能,对大型冲压机设备性能的提高具有重要意义。
1 系统数学模型和问题描述
典型缓冲液压缸原理如图1所示。
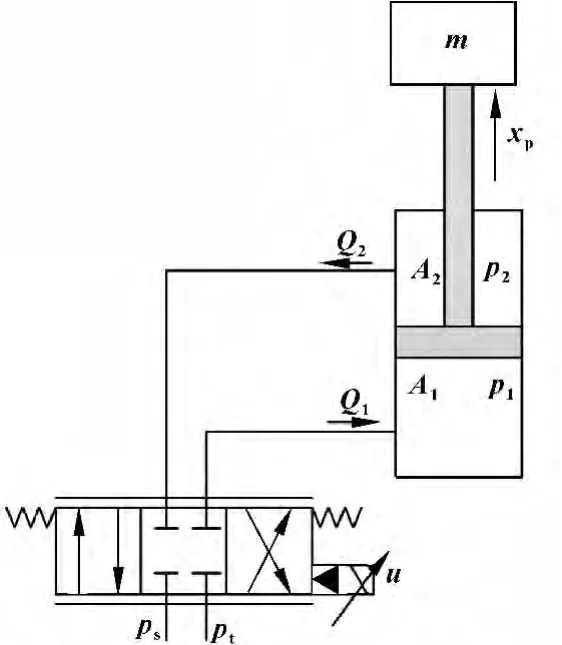
图1 缓冲液压缸工作原理图
忽略液压缸内外泄漏,缓冲液压缸两腔压力动态为[8]:
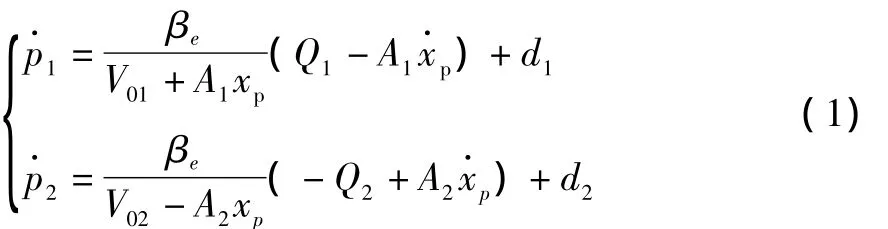
式中:p1和p2分别为缓冲液压缸无杆腔压力和有杆腔压力,A1和A2分别为缓冲液压缸无杆腔和有杆腔面积,xp为缓冲液压缸位移,V01和V02为缓冲液压缸无杆腔和有杆腔的初始容积,βe为油液体积弹性模量,Q1为流入液压缸无杆腔流量,Q2为流出液压缸有杆腔流量,d1和d2分别为两腔压力动态中的集中干扰项,由系统中参数不确定性和外部干扰引起。
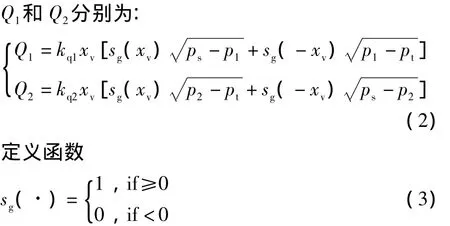
式中:kq1、kq2为伺服阀流量系数,xv为伺服阀阀芯位移,ps为泵源压力,pt为回油箱压力。
忽略伺服阀的阀芯动态,将伺服阀阀芯位移与输入信号u的关系简化为线性关系,可得:xv=kxu。
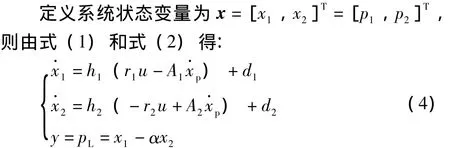

y为缓冲液压缸输出负载压力pL,α为缓冲液压缸面积比。
由式(4)得缓冲液压缸输出负载压力pL动态为:

由系统状态方程 (4)可以看出,该电液控制系统为非线性系统,且由于系统温度、工作环境的不同,系统中参数存在不确定性,因此本文控制目标可归纳为:
针对缓冲液压缸电液伺服系统,在存在参数不确定性和外部干扰的情况下,设计一种控制算法,在保证系统稳定性的前提下,使缓冲缸负载压力y精确的跟随压力指令yd。
2 算法设计
定义缓冲液压缸负载压力跟踪误差为y~=y-yd,取:
3 仿真结果及分析

首先在恒定上模压下速度30 mm/s下进行缓冲力闭环控制性能仿真,并与PID控制效果进行对比,仿真结果如图2、图3所示。由图3可以看出,文中的积分滑模控制算法输出误差的绝对值小于PID控制结果,具有较好的动态性能。

图2 两种算法响应曲线对比
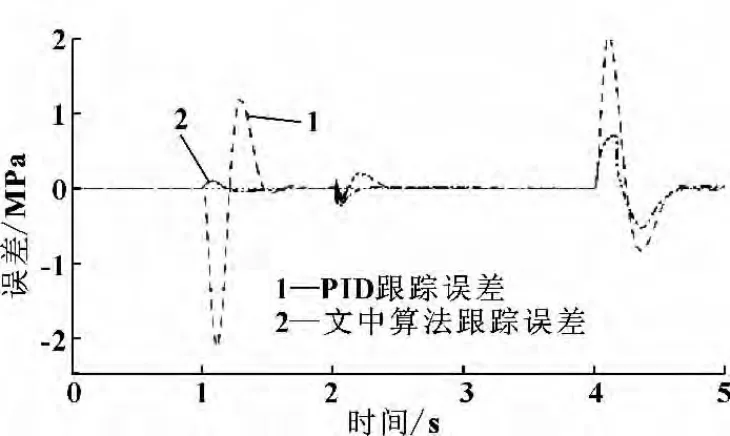
图3 两种算法响应误差对比
为了验证控制器克服系统不确定性的能力,上模压下速度取设为变量,如图4所示,跟踪误差仿真结果如图5所示。采用文中的积分滑模算法时,得到了较好的控制效果,输出误差绝对值小于0.6 MPa;当采用PID控制策略时,跟踪误差明显增加,最大误差绝对值超过1.5 MPa,这表明干扰对系统控制性能有较大的影响,而采用文中的控制方法能够有效地克服这种影响。

图4 速度干扰曲线

图5 两种算法响应误差对比
4 结论
提出一种基于积分滑模的缓冲液压缸输出力控制策略,用于对存在外界干扰与参数不确定性的缓冲液压缸输出力控制,给出了滑模面及控制律的设计方法。仿真结果表明:该控制方法可取得良好的控制性能,具有较强的鲁棒特性,能够很好地克服不确定参数以及由外部干扰对系统的影响。
[1]王文娟.利用液压垫进行四角调压的压机液压系统设计[J].流体传动与控制,2012(3):25 -27.
[2]夏卫明,李辉,骆桂林,等.液压垫结构优化设计[J].锻压装备与制造技术,2014(1):49-51.
[3]徐尚德,雷君相,于珊珊.板料拉深过程中的压边力控制技术[J].锻压装备与制造技术,2004(2):51-55.
[4]蔡喜.机械压力机中数控液压垫的应用与分析[J].一重技术,2011(4):32-34.
[5]宋雨芳,吴友坤,王翠萍.新型液压机上液压垫装置的设计与应用[J].锻压装备与制造技术,2005(4):31-32.
[6]姜万录,朱勇,郑直,等.电液位置伺服系统非线性动力学行为研究[J].机床与液压,2013(17):5-11.
[7]李自光,游张平.基于Simulink的液压伺服系统动态仿真[J].中国工程机械学报,2004(1):30-34.
[8] MERRITT H E.Hydraulic Control Systems[M].Wiley:1967.
[9] UTKIN V,JINGXIN S.Integral Sliding Mode in Systems Operating Under Uncertainty Conditions[C].1996.
[10]UTKIN V,GULDNER J,SHIJ.Sliding Mode Control in E-lectro-Mechanical Systems,Second Edition[M].Taylor &Francis,2009.
Integral Sliding Mode Based Load Pressure Control of Die-cushion Cylinder of Hydraulic Press
YEWei
(Technical Center,Taiyuan Heavy Machinery Group Yuci Hydraulic Industry Co.,Ltd.,Jinzhong Shanxi030600,China)
An integral slidingmode based control scheme was put forward by aimed at the problem of load pressure force control of die-cushion cylinder of hydraulic press.Thismethod was fully exploited themeritof robustness of slidingmode control,which implemented tracking control of desired load pressure trajectory of die-cushion cylinder precisely,in addition,it had good disturbance rejection function to uncertainties and external disturbances of the parameter.Theoretical analysis and simulation results in comparing show the effectivenessof the proposed control algorithm.
Hydraulic press;Die-cushion cylinder;Load pressure force;Robustness
TH137
A
1001-3881(2015)21-160-3
10.3969/j.issn.1001 -3881.2015.21.039
2014-09-02
叶伟 (1983—),男,本科,工程师,从事液压元件设计及电液控制技术研究。E-mail:yucihydraulicsx@163.com。
猜你喜欢
建材发展导向(2023年4期)2023-03-14
冶金设备(2020年2期)2020-12-28
重型机械(2020年2期)2020-07-24
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
国际木业(2016年2期)2016-12-01
石油化工建设(2015年6期)2015-12-01
组合机床与自动化加工技术(2014年10期)2014-03-01
压缩机技术(2014年5期)2014-02-28
