
钢丝绳爬行器结构方案设计
2015-03-09 03:32钟功祥彭福国吕志忠
机床与液压 2015年21期
钟功祥,彭福国,吕志忠
(西南石油大学机电学院,四川成都 610500)
钢丝绳爬行器结构方案设计
钟功祥,彭福国,吕志忠
(西南石油大学机电学院,四川成都 610500)
随着现代化技术的发展,电缆检测需要钢丝绳爬行器携带仪器检测钢丝绳代替以往由人工巡检的方式。研究中根据仿生学原理提出钢丝绳爬行器结构不同的3种方案,通过对3种不同结构方案的优缺点进行对比分析,得出能够跨越高压电缆上大部分障碍物的优化结构;并在SolidWorks中对爬行器主要受力部件进行受力仿真分析,为后续优化及实验提供理论基础。
电缆检测;爬行器;SolidWorks
0 前言
高压输电线路是长距离输配电力的主要方式,担负着输送电力的重任,是国家基础设施建设和社会发展的“动脉”,起着极其重要的作用。由于高压线路的工作环境复杂,常常因为受到持续的机械张力、电气闪络、材料老化的影响而产生严重的事故,造成巨大的经济损失。为了保证输电线路安全、稳定地运行,需要对输电线路进行定期的巡检。
目前,对输电线路进行巡检的方法主要有两种:一种是人工目测法,巡检人员用望远镜对线路进行检测,但这种方法效率低、精度低、漏检的可能性大;二是航测法,检测人员搭乘直升机沿输电线路飞行,用肉眼或机载摄像设备观察、记录线路的使用情况,同时也有检测费用高昂、技术难度高等缺点。随着机器人技术的发展,将巡线机器人应用与高压输电线路的巡检作业,并可以跨越输电线路上的障碍物 (防震锤、耐张线夹、悬垂线夹、杆塔等),利用携带的仪器对输电线及附近的器件进行检测,步进可以减轻工人的劳动强度,降低巡检费用,而且可以提高巡检作业质量和效率,因此迫切的需要一种线缆爬行器能高效地完成检测任务。
巡线机器人的研究始于20世纪80年代末,日本、美国、加拿大、泰国的一些研究机构先后开展了巡线机器人的研究,国外巡线机器人的发展以加拿大的魁北克水电研究院的Serge Montambault等研制的名为Linescout的巡线机器人[4]最具典型性,其能够实现跨越输电线缆上的障碍物,并且已经进行了现场试验[5],爬行性能良好,有成套的操作设备,但机械结构较为复杂,价格昂贵;国内巡线机器人的研究始于20世纪90年代末,具有代表性的有武汉大学的吴功平等[1]研制自动巡线机器人、北华大学的姜生元等[2]吊臂式巡线机器人等。
通过查阅文献[6]了解,国内外高压巡线机器人的行走方式基本为两种:步进蠕动式和连续滚动式。步进蠕动式行走速度较慢,爬行过程稳定性高,且具有跨越障碍的功能;连续滚动式速度快,但不平稳,且单一的轮式爬行方式难以跨越障碍物。文中设计的机器人行走装置将两者的优点结合,研制出了具有越障功能的钢丝绳爬行器。
1 爬行器结构方案设计
一个完整意义上的巡线机器人应包括两大技术,由沿线爬行的爬行机器人本体和对线缆进行故障检测[6]的检测两部分组成,而文中主要是对爬行器的爬行机构进行设计。
巡线机器人可以分为两类:一类是具有跨越障碍物的功能,但结构尺寸大、质量大,因而实用性差,并大多处于实验室研制阶段;另一类则只能在两杆塔间的直线段运动,不具备跨越障碍物功能,因而巡线机器人作业范围受到了极大的限制。
1.1 主要跨越的障碍物
要对爬行器的结构进行设计,首先就要了解爬行器所需要跨越的障碍物,一般线缆主要障碍物有:防震锤、悬垂线夹、绝缘子串、耐张线夹等,如图1所示。

图1 爬行器跨越的主要障碍物
1.2 爬行器爬行机构设计
根据仿生学原理,构想出了有4个卡爪的爬行器结构,并在SolidWorks中进行实体建模,通过分析不同结构的优缺点,得出较优的结构,这里提出3种方案。
1.2.1 方案一
爬行器各部件连接关系如图2所示。
其工作过程:一侧的两个卡爪通过无线模块接收到的信号控制卡紧电机带动链轮,与链轮相固定连接的花键套带动花键杆旋转,进而卡爪旋转卡紧钢丝绳,另一侧两个卡爪松开,通过两个丝杠的转动,一侧主体前进至丝杠末端,伸缩电机启动,两卡爪伸长并卡紧钢丝绳,另一侧两个卡爪进行放松、收缩动作,两侧如此交替动作,通过蠕动爬行的方式,实现爬行器的前进及越障。
方案一的优、缺点:能够实现爬行及越障的功能,是一种新颖的结构;但在没有障碍物的情况下,每次向前爬行都需要卡爪放松、收缩、伸长、卡紧的过程,从爬行的长期过程来看,两侧卡爪的交替动作浪费了运行的大部分时间,使得爬行器整体的运行速度受到限制。
1.2.2 方案二
方案二如图3所示,其爬行的过程跟方案一大致相同,但卡爪部分增加了两个电机及减速器,这样在爬行的过程中,两侧卡爪始终保持卡紧状态,根据爬行过程中钢丝绳的坡度改变卡紧力的大小,由卡爪上的电机直接驱动滚轮前进,当遇到障碍物时,才松开一侧卡爪,越障过程跟方案一中的越障方式相同。
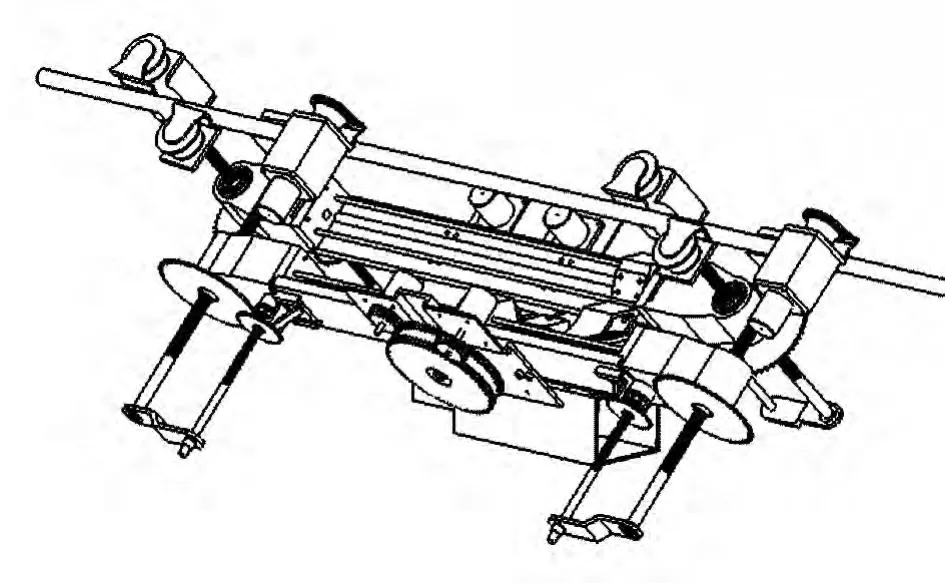
图3 方案二
方案二的优、缺点:能够实现爬行、越障的功能,大大提高了爬行器爬行的速度及效率,但卡爪卡紧需要经过齿轮传动、链条传动,由于链条传动本身的特点决定了一侧的两个卡爪难以保证卡紧力能够完全同步,同时卡爪伸缩也需要齿轮传动、链条传动,在双电机基座板上受空间尺寸的限制,使得设计难以实现。
1.2.3 方案三
方案三如图4所示,在前两个方案的基础上对结构进行改进,将卡爪的伸缩动作通过齿轮传动、丝杠传动实现,而卡爪的卡紧通过电机、减速器、齿轮传动直接带动花键杆、卡爪,减速器的减速比可根据需要选用。这样,不仅替代了方案二中的链传动,使一侧的两个卡转能够同步运行,而且伸缩动作用一个丝杠带动两个花键杆,使得整体结构更加简单、紧凑,性能更加稳定。

图4 方案三
经过比较3种方案的优缺点,确定了方案三为最优的结构设计方案。
2 爬行器的组成及其功能
根据所要跨越的障碍物对爬行器的结构进行设计,其各个部件按照功能的不同进行分类,主要由如下几个部分组成,如图5、6所示。

图5 爬行器轴测视图

图6 爬行器左视图
(1)卡紧部分:主要由卡紧电机、减速器、齿键、卡爪组合机构组成,用于爬行器在越障时卡紧钢绳,并在越障驱动的作用下,一侧向前运行跨越线路上的障碍物。
(2)越障驱动:主要由丝杠、滑台、杆组成,在爬行器一侧卡紧钢丝绳时,由另一侧的丝杠电机驱动丝杠滑台前进。
(3)连接块:由连接块将两侧丝杠组连接固定,形成一个整体,并且为控制电路板、电池及其他设备提供安置空间。
(4)通信系统与控制系统:通信系统与控制系统由单片机及其扩张功能模块构成。爬行器的所有动作都是通过电机实现的,控制系统用单片机于对各个电机进行时序控制,而对系统控制的最终权限由地面通过通信系统发送指令控制爬行器前进、后退、越障。
(5)控制软件:用vb软件编写的爬行器控制软件,其主要作用是通过控制软件对爬行器的动作进行控制。
(6)电池:为爬行器各电机、单片机及各个模块提供电源。
3 爬行器基本参数计算
爬行器设计应该满足的基本参数:(1)钢丝绳直径:≤70 mm;(2)小车行走速度:0.16 m/s;(3)最大爬坡角度:30°;(4)小车自重:≤30 kg。
3.1 卡爪卡紧力的计算
爬行器在钢丝绳上爬行的简化力学模型如图7所示。

图7 爬行器在钢丝绳上爬行的简化力学模型
爬行器在钢丝绳不打滑,式 (1)为爬行器在钢丝绳上保持静止时与爬行坡度的函数关系,式 (2)为爬行器能够向上滚动爬行的条件。

式中:Fa为爬行器静止时所需卡紧力;Fb为电机提供向上拖动力;m为爬行器总机质量;μ为卡爪与钢丝绳静摩擦因数;θ为爬行器的爬行坡度。
由《机械设计手册》查得铝硅合金与硬橡胶的摩擦因数μ=0.25,静止时所需要的卡紧力与爬行坡度的关系[8]如图8所示。
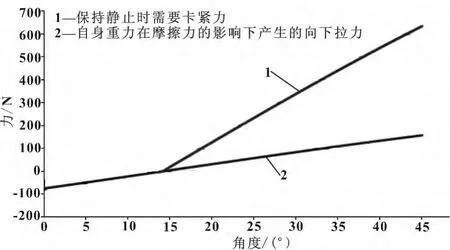
图8 卡紧力与爬行坡度的关系
由图8可知,爬行坡度为14°左右时,爬行器可以依靠自重产生的摩擦力保持不动,但大于14°时必须给卡爪施加相应的卡紧力才能保证爬行器不会向下滑动;随着爬行坡度的增加至30°时,卡卡爪的紧力至少达到需要340 N。

卡爪的压紧力由电机提供,静止时电机扭矩与压紧力的函数关系为:式中:T电为电机扭矩;i减为直角减速器传动比;i齿为齿轮传动比;r为卡爪两侧实际接触面到对称中心的距离。
根据结构尺寸及机械设计准则,确定减速器及齿轮的传动比,故可以根据扭矩及转速确定卡紧电机的型号。
3.2 爬行电机的选型计算
爬行器卡爪处总共有两个驱动电机,是驱动爬行器前进的动力源,在爬行器运行不打滑的情况下,根据功、能关系可以求得功率。如式:

式中:t为时间,s;v为爬行器运行速度,m/s;s为单位时间爬行的路程,m;P为电机功率,W。

考虑到传递效率及留有一定余量取P=25W,则选取的前进驱动电机的相关参数如表1所示。

表1 前进驱动电机的相关参数
4 关键部件受力分析及优化
要保证爬行器能够正常工作,首先应保证各个零部件能够不失效,所以对爬行器的卡爪、花键杆及连接块在SolidWorks的Simulation模块中进行了受力仿真分析。
4.1 卡爪与花键杆受力分析
实际工况中,一般情况下是四个卡爪共同分担整机重量,越障的时候则只有一侧的两个卡爪卡紧钢丝绳,此时卡爪与花键杆承受的力最大,故受力分析应为越障时的实际工况。
由文中第3节所述可知,在坡度为30°时,跨越障碍物时,两个卡爪需要的压力为340 N,并且承受整机300 N的重力,对于单个卡爪所受到的力为整体的一半,图9为仿真施加的约束及划分网格。
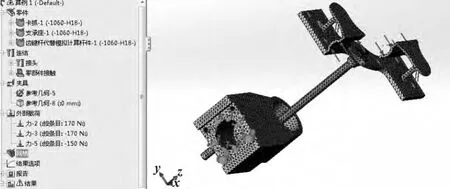
图9 网格划分
卡爪、花键杆、支承座的选用铝合金 (1060-H18),在Simulation模块中仿真运行结果如图10所示:

图10 卡爪仿真结果
由仿真结果可以看出,卡爪处最大米塞斯应力为4.8×107N/m2,最小安全系数为2.6,最大位移量为0.681 4 mm,满足设计要求。
4.2 连接块受力分析
连接块的作用是连接两侧丝杠传动,并携带电池、控制模块、无线模块及检测仪器。在爬行器工作时,需要对连接块的强度进行校核,并仿真其在真实工况下的变形量,看是否满足爬行要求。
在跨越障碍物的情况下,连接块受到丝杠传动副及自身的重力,为简化分析,将卡爪、花键杆、支承座、电机及减速器产生的重力施加到两侧支撑板,其网格划分及各部件连接关系如图11所示。

图11 网格划分
仿真结果如图12所示。
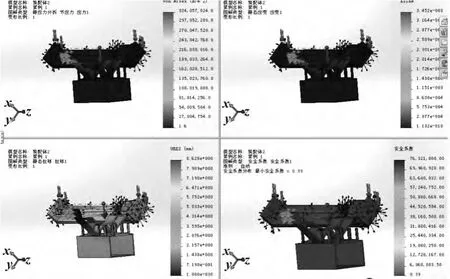
图12 连接块仿真结果
由仿真结果可以看出,连接块与丝杠滑台螺栓连接处应力最大,其值为3.24×108N/m2,而最小安全系数为0.39,表明当前连接块强度不满足设计要求,所以需要对连接部分进行优化处理,使整体最小安全系数至少大于1,保证爬行器能够正常运行。
由分析图可知,连接块连接螺栓的螺栓孔为最危险处,受到了应力最大,所以对连接块螺栓连接处进行加厚处理如图13所示。
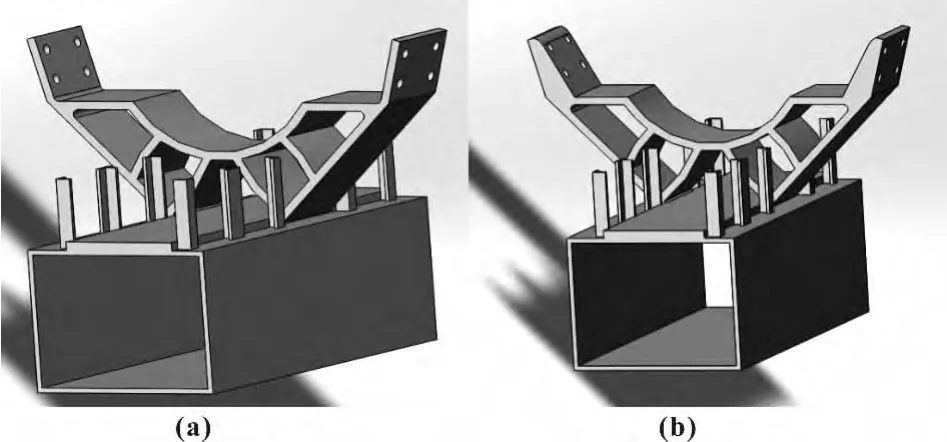
图13 加厚连接块
连接块螺栓连接处加厚后再进行仿真计算,其结果如图14所示。

图14 优化结果
优化后,分析模型中最大米塞斯应力为7.7×107N/m2,最小安全系数为1.62,最大位移量为3.07 mm,满足设计要求。
5 结论
(1)通过提出的3种不同钢丝绳爬行器结构设计方案,相互比较各自的优缺点,得出了一种理论上能够爬行、越障的钢丝绳爬行器。
(2)对爬行器关键部位进行仿真分析,并对强度不足之处进行优化,为后续的优化和现场实验提供了理论依据。
(3)下一步进行对钢丝绳爬行器控制部分的硬件和软件进行设计,完成钢丝绳爬行器的完整设计,尚需加工实物进行现场试验。
[1]吴功平,肖晓晖,郭应龙,等.架空高压输电线自动爬行机器人的研制[J].中国机械工程,2006,17(3):237-240.
[2]姜生元,任立敏,焦宏章,等.吊臂式巡线机器人悬吊姿态平衡机构的研究[J].机械设计,2011,28(1):50-53.
[3]张运楚,梁自泽,谭民,等.架空电力线路巡线机器人的研究综述[J].机器人,2004,26(5):467 -473.
[4]MONTAMBAULT Serge,HYDRO-QUEBEC Nicolas Pouliot.Development of an Inspection Robot Capable of Clearing Obstacles While Operating on a Live Line[C]//Conference on Transmission and Distribution Construction,Peration andLive-line Maintenance,IEEE,2010.
[5]TOTH Janos,POULIOT Nicolas,MONTAMBAULT Serge.Field Experiences Using Linescout Technology on Large BC Transmission Crossings[C]//1st International Conference on Robotics and Automation,October 5 -7.Canada,IEEE,2010.
[6]贲安然.在役平行钢丝拉索断丝漏磁检测方法及装置[D].武汉:华中科技大学,2012.
Design of Line-spider Scheme
ZHONG Gongxiang,PENG Fuguo,LV Zhizhong
(Institute of Electrical and Mechanical,Southwest Petroleum University,Chengdu Sichuan 610500,China)
With the developmentofmodern technology,the cable inspection need line-spider to carry instruments instead of artificial inspection.According to the theory of bionics,three different kinds of solutions were proposed in the study of line spider reserch,based on comparing the advantages and disadvantages of three different structure scheme,it was concluded an optimization structure which can go over themost abstacles on the line.And FEManalysiswasmade formain components of the line-spider based on the SolidWorks,which provides the theoretical foundation for further optimization and experiments.
Cable detect;Line-spider;SolidWorks
TH12
B
1001-3881- (2015)21-037-5
10.3969/j.issn.1001 -3881.2015.21.008
2014-08-20
省部共建“石油天然气装备”教育部重点实验室资助项目 (2011 sts03)
钟功祥 (1962—),男,硕士,教授,研究方向为石油机械工程。E-mail:zhonggx3170@163.com。
彭福国,E-mail:120978066@qq.com。
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
中国电业与能源(2021年4期)2021-05-22
内江科技(2021年3期)2021-04-04
装备制造技术(2020年1期)2020-12-25
机械制造与自动化(2020年3期)2020-07-16
广西电业(2020年11期)2020-03-23
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2018年11期)2018-11-23
无人机(2018年1期)2018-07-05
设备管理与维修(2015年12期)2015-12-25
