
基于线性霍尔元件的准无位置传感器伺服系统设计
2015-03-12 09:23谢宏亮
微特电机 2015年5期
谢宏亮
(湘潭大学,湘潭411100)
0 引 言
永磁同步电机因其效率高、能耗低、体积小、调速范围宽等优点在工控行业越来越得到广泛的应用。要实现电机的高精度全闭环控制,必需准确获取电机转子的位置、速度信息。
目前应用的位置传感器主要是光电编码器,但机械冲击等因素引起的振动易使码盘破碎;并且由于成本因素,一般使用增量式编码器,容易产生读数累计误差;而绝对式编码器价格昂贵、且体积大,增加了机械结构的复杂度和成本[1],并且和控制器之间的数据通信容易产生误差。针对上述问题,许多学者提出了应用反电动势[2]、状态观测器[3-4]、神经网络[5]、或卡尔曼滤波器[6]的无位置传感器控制策略,但是计算模型复杂以及运算量大、耗时长,直接影响到系统控制周期和控制效果,需要高性能处理器,并且估算效果严重依赖于电机参数的准确性[7](电机长时间运行下的发热将导致参数发生非线性变化),低速下控制性能差,尤其是系统刚上电情况下很难获取电机转子初始位置。因此这些控制方式要真正实现在工农业生产中大规模应用还需一定时间[8]。
为了降低成本,文献[9 -12]提出了一种采用单个锁定型(开关)霍尔进行角度测量的方法,取得了一定的效果,但是存在低速和电机速度变化较快时性能不高的缺点;同时从开关霍尔工作特性曲线可以看出,开关霍尔信号输出存在磁滞现象,使得测量算法存在误差,精度不高。线性霍尔具有体积小、价格低等优点[13],文献[14]提出了一种基于线性霍尔元件的新型绝对式多极磁电轴角编码器设计方案,取得了较好的效果。本文基于文献[14]提出一种应用线性霍尔元件的准无位置传感器伺服控制方案,采用两个环形磁钢固定在电机非负载端轴上作为粗精码道实现角度细分,利用线性霍尔元件来得到电机转子位置信息。霍尔元件的输出直接单片机的模拟输入口,经模数转换成数字信号。预先用一高精度的增量式光电编码器进行校准,得到霍尔信号和标准角度的关系,将数据存储到单片机的只读存储器(ROM)中。实际工作下,通过查表得到电机转子位置来实现闭环控制,计算量非常小,基本不占用控制时间。在保证控制效果前提下,极大降低了产品成本,提高了产品可靠性。
1 准无位置传感器控制器设计
控制系统主要由电源部分、永磁同步电动机、霍尔传感模块、主控电路、功率驱动以及外围接口电路构成,如图1 所示。
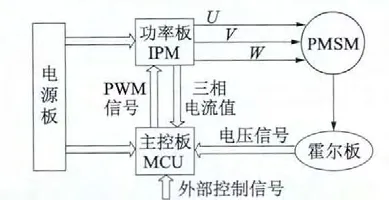
图1 控制系统硬件组成
处理器(MCU)采用某型号32 位处理器,霍尔传感模块由6 个线性霍尔元件(3 个贴片封装,3 个插件封装)和固定支架组成。对固定在电机轴上两个磁环磁场进行感应,霍尔输出直接单片机的模拟输入口,无需放大电路,有利于降低系统成本。其中贴片霍尔输出接ADC0 和ADC1,插件霍尔输出接ADC2。系统的控制框图如图2 所示,根据霍尔信号通过位置求解算法实时得到电机转子位置,作为机械环的反馈,经过PI 调节器,得到电流环指令,然后根据电机三相实际反馈电流得到电流指令偏差,通过PI 调节器得到电压指令信号,采用PWM 调制实现对IPM 的有效控制,从而实现对电机速度、转矩的有效控制。

图2 系统控制框图
2 准无位置传感器位置检测方案设计
霍尔感应模块由两个磁环和霍尔元件组成,磁环一为单对极磁钢,定义为粗码道;磁环二为6 对极磁钢,定义为精码道。磁环固定在电机轴上,相隔一定距离以消除两个码道之间的磁耦合。
霍尔元件的输出信号包含了转子位置信息,传统方法是采用求反正切方法得到,但计算比较复杂且精度不高。本文利用校准查表的方法得到角度θ,预先用高分辨率的增量式光电编码器进行校准,得到霍尔输出信号和标准角度的对应关系,然后通过单片机的自编程技术无需拆卸硬件将数据存储到单片机的ROM 中。控制过程中,根据霍尔信号查表得到电机转子位置,响应速度较快。
2.1 粗码道设计
采用廉价永磁体径向充磁得到单对极磁钢环作为粗码道,磁钢环固定在电机转子上,3 个线性插件霍尔H4,H5,H6均匀分布在磁钢外环,依次相距120°,霍尔与磁钢之间气隙为0.75 mm,如图3(a)所示。磁环可均匀细分为6 个60°子区间如图3(b)所示。当霍尔元件感应的磁场为“N”,霍尔输出定义为“0”,反之定义为“1”。因此电机转子带动磁钢环旋转一周,三个线性霍尔输出为如图4 所示的6个状态,其代表的绝对角度偏移值如表1 所示。偏移值预先存储在ROM 中,在工作中根据霍尔H4,H5,H6查表得到此时的绝对偏移量。
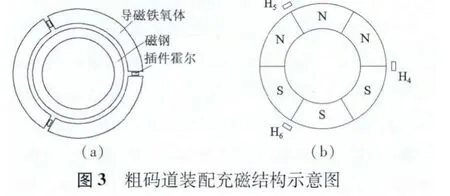

图4 霍尔输出信号状态转移图
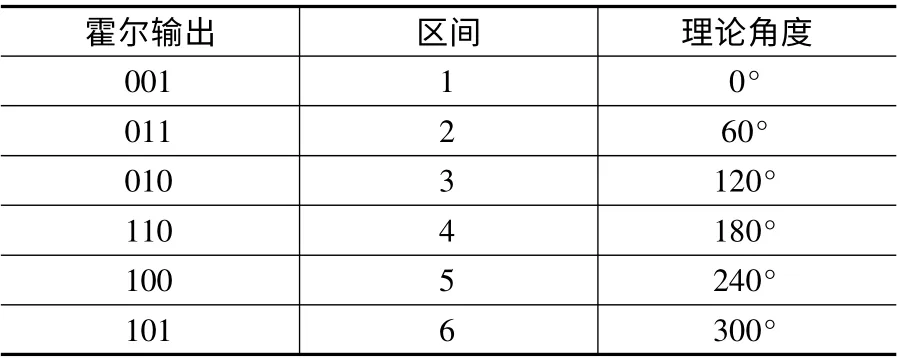
表1 霍尔输出与理论角度映射关系
2.2 精码道设计
精码道实现粗码道中每区域内角度的再细分以提高角度测量分辨率。6 对极精码道基本结构如图5 所示,任一“N -S”对应理论角度60°。三个线性贴片霍尔元件H1,H2,H3焊接在印刷电路板(PCB)上,其物理安装角度均匀间隔20°。3 个线性霍尔元件的输出可用下式描述:
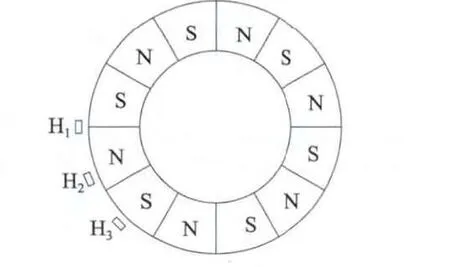
图5 6 对极精码道结构示意图

定义精码道中任一相邻“N -S”为一个信号周期,线性霍尔理论输出波形如图6 所示。电机转子旋转360°,霍尔信号变化6 个信号周期,对应于机械角度360°。
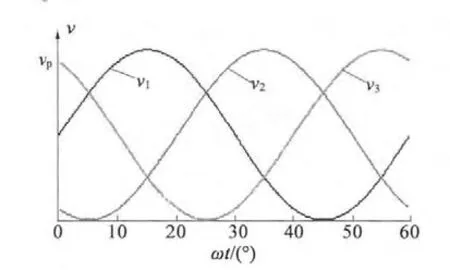
图6 霍尔理论输出波形
角度求解算法在信号处理上采用基于校准查表的处理方式。预先用一高分辨率的增量式光电编码器进行校准。在校准状态下,光电编码器通过特定的高同轴度工装和伺服电机连接,在匀速旋转过程中通过数据采集和处理工具对光电编码器的角度脉冲输出和霍尔信号v1,v2,v3同时进行采样,数据通过USB 上传到上位机,采用基于改进移动窗口最小二乘法进行数据处理得到实际物理角度和线性霍尔输出之间唯一对应关系。利用单片机在线自编程技术无需拆卸硬件而将数据下载到单片机的ROM中。工作过程中根据霍尔信号查表得到转子在任一“N-S”下相对偏移角度。
现有v1,v2,v3三条信号,需要确定用哪相查表误差最小精度最高。从三条信号曲线特性我们可以分析出,在[0°,5°]范围内,v1幅值变化范围最大,v3次之,v2最小,因此v1具有最好的线性度,适合作为查表基准,其他区间分析类似。在工作状态下,算法处理流程如图7 所示,精码道霍尔输出信号v1,v2,v3通过运算放大器进行信号放大,进行模数转换得到数字信号,然后进行信号的低通滤波、温漂补偿等后续处理,查表得到转子在所处磁极区间内的相对偏移量;同时对绝对码道霍尔H4,H5,H6的输出信号进行模数转换和数据编码,查表得到转子所处磁极区间的绝对偏移量,两者合成得到转子的绝对角位移。

图7 角度求解流程
3 实验分析
准无位置传感器控制系统结构框图如图8 所示。采用三菱智能功率模块IPM 驱动电机,单片机通过SPI 与外部设备进行通讯来进行速度调节,位置设定等操作,系统参数存储在EEPROM 中。
霍尔模块中,精码道的三个贴片霍尔输出波形如图9 所示,粗码道对应的插件霍尔输出波形如图10 所示。将角度通过串口输出到计算机得到误差如图11 所示,结果表明角度分辨率能够达到15 位。


图11 角度分辨率
电机控制算法采用经典的转子磁场定向矢量控制策略。在控制程序设计上,主程序周期设置为60 μs,即在波峰和波谷都进入中断服务程序。在中断服务程序中先读取霍尔信号值,通过查表得到当前转子位置信息,然后进行机械环和电流环的控制,最终得到六路PWM 控制信号驱动功率模块,软件运行时序如图1 2 所示。图1 3 为系统从0 上升到4 000 r/min 运行一段时间再制动到0 的频繁起停波形,其中图13(b)为图13(a)实线部分的局部放大图。实验结果表明整个控制系统工作正常,运行稳定。


图13 4 000 r/min 电机单相电流波形
4 结 语
本文提出了一种应用线性霍尔元件实现永磁同步电机准无位置传感器控制策略,设计了一套生产工艺简单的霍尔信号产生模块,并且基于MCU 进行了控制器的设计,实现了电机转子高精度绝对检测,实时性好,解决了控制系统的成本和性能之间的矛盾。实验结果表明,系统控制精度高,调速范围宽,响应速度快,性能可靠,适合于工农业生产中批量应用。
[1] 陆华才,徐月同,杨伟民,等. 无位置传感器表面式永磁同步直线电机初始位置估计新方法[J].中国电机工程学报,2008,28(15):109 -113.
[2] 张剑,温旭辉,刘钧,等. 一种基于DSP 的PMSM 转子位置和速度估计新方法[J].中国电机工程学报,2006,26(12):144 -148.
[3] 黄志武,桂卫华,年晓红,等. 一种新型的基于观测器的无速度传感器感应电动机定子电阻辨识方案[J]. 电工技术学报,2006,21(12):13 -20.
[4] 高扬,杨明,于泳,等. 基于扰动观测器的PMSM 交流伺服系统低速控制[J].中国电机工程学报,2005,25(2):125 -129.
[5] 夏长亮,王明超,史婷娜,等. 基于神经网络的开关磁组电机无位置传感器控制[J].中国电机工程学报,2005,25(13):123 -128.
[6] 陈振,刘向东,靳永强,等. 采用扩展卡尔曼滤波磁链观测器的永磁同步电机直接转矩控制[J].中国电机工程学报,2008,28(33):75 -81.
[7] 王铁成,徐永向,邹继明,等. 基于简易位置检测的高速永磁同步电机系统[J]. 哈尔滨工业大学学报,2005,57(3):388 -390.
[8] 朱宏伟,邹继斌. 低成本永磁同步电动机驱动器的软硬件架构及实现[J].电机与控制学报,2007,11(4):345 -348.
[9] 邹继斌,徐永向,于成龙. 正弦波无刷直流电机的新型转子位置检测方法[J].中国电机工程学报,2002,22(12):47 -49.
[10] 周兆勇,徐征,李铁才. 基于两相正交开关霍尔传感器的混合型转子位置预估方案的FPGA 实现[J]. 电工技术学报,2004,19(1):61 -64.
[11] 徐征,李铁才. 准无位置传感器永磁同步电动机驱动系统中霍尔传感器位置检测误差的分析及解决方案[J]. 中国电机工程学报,2004,24(1):168 -173.
[12] 徐永向,邹继明,赵猛,等. 基于单霍尔传感器的PMSM 位置检测方法[J]. 哈尔滨工业大学学报,2008,40(11):1769 -1772.
[13] 刘晓,叶云岳,郑灼,等. 一种低成本的线性霍尔位置检测方法研究[J]. 浙江大学学报(工学版),2008,42(7):1204 -1207.
[14] 郝双晖,刘勇,郝明晖.绝对式多极磁电轴角编码器的设计[J].光学精密工程,2010,18(4):863 -871.
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
数学物理学报(2022年4期)2022-08-22
房地产导刊(2021年12期)2021-12-31
中学生数理化·高一版(2021年2期)2021-03-19
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
童话王国·文学大师班(2017年6期)2017-07-10
微特电机(2017年10期)2017-05-15
西安工程大学学报(2016年6期)2017-01-15
探测与控制学报(2015年4期)2015-12-15
太空探索(2015年6期)2015-07-12
