
飞行员着舰下滑轨迹跟踪操纵策略研究
2015-03-16 01:07赵振宇韩维陈俊锋
飞行力学 2015年6期
赵振宇, 韩维, 陈俊锋
(海军航空工程学院 飞行器工程系, 山东 烟台 264001)
飞行员着舰下滑轨迹跟踪操纵策略研究
赵振宇, 韩维, 陈俊锋
(海军航空工程学院 飞行器工程系, 山东 烟台 264001)
为了比较前面与背面这两种飞行员着舰时所采用的操纵策略,建立了双通道飞行员跟踪控制任务模型。在此基础上,运用SIMILINK软件,仿真了采取两种不同操纵策略下飞机消除轨迹偏差实现轨迹跟踪的飞行历程,得出了两种操纵策略下飞行员模型两个通道的杆偏及飞机相关参数的响应特性。通过分析比较可知,着舰下滑时飞行员采用背面操纵策略更容易进行轨迹跟踪,且当初始轨迹偏差较小时,采用该策略仅控制主通道便可实现轨迹跟踪。
飞行员模型; 舰载机; 操纵策略; 轨迹跟踪
0 引言
舰载飞机着舰是一项十分具有挑战性的工作,虽然自动着舰技术(ALCS)已经十分成熟,但是着舰操纵技术仍是每一个舰载机飞行员必须掌握的关键技能。以飞机纵向控制为研究对象,舰载飞机进行着舰时,速度处于第二飞行范围,飞机工作在阻力曲线的背面[1-2]。由于飞机下滑时轨迹不稳定,飞行员需同时操纵驾驶杆和油门杆来实现下滑轨迹跟踪及速度、迎角的保持,飞行员操纵飞机的方式及工作量与普通着陆有着很大的区别。
文献[1-3]对不同的操纵策略都有描述,但是并未深入分析不同操纵策略下飞行员操纵方式的差异以及油门杆和驾驶杆操纵时的协调配合情况。本文将从人工着舰中常用到的两种操纵策略(前面操纵策略、背面操纵策略)入手,结合飞行员模型,研究不同操纵策略下驾驶杆和油门杆的协调配合情况,并分析两种操纵策略的优劣。
1 飞行员建模
舰载飞机着舰下滑时,对飞行员的操纵行为进行建模研究,可以验证操纵策略的优缺点,寻找操纵规律,进而对飞行员下滑着舰操纵给予指导。
舰载飞机着舰时,飞行员和舰载飞机系统组成了双通道控制的人机系统。参考文献[4-5],构建了简化的双通道飞行员跟踪控制任务模型,如图1所示。

图1 双通道飞行员跟踪控制任务模型Fig.1 Dual-channels pilot model about tracking task

因此,可得出两个通道的飞行控制律为:
δ2=kc(c2-y2)
式中:c1和c2分别为飞机理想的高度误差及迎角误差,一般为0;y1为飞机高度误差ΔH;y2为飞机的迎角误差Δα。
[5]飞控增益的设计方法,结合飞行员在环实测数据,可得出采用前面操纵策略时kp=2.2,kc=9.5,kd=0.25,驾驶杆限幅器取值为±5°,油门杆限幅器取值为±2°;采用背面操纵策略时kp=5,kc=1,kd=17.5,驾驶杆限幅器取值为±2°,油门杆限幅器取值为±10°。
下滑过程中,飞行员在两个通道上的精力分配是不平均的。在使用前面操纵策略完成下滑着舰任务时,飞行员通过对高度误差及高度误差变化率进行判断,将大部分精力用于驾驶杆的操纵来控制跟踪下滑轨迹,这时驾驶杆通道为主通道,同时留较少的精力根据迎角误差反馈来操纵油门杆,保持飞机迎角,该通道为副通道;而采用背面操纵策略时,飞行员主通道为油门杆操纵,副通道为驾驶杆操纵。
2 着舰下滑仿真
以文献[7-8]中建立的F/A-18舰载机着舰下滑为例,在SIMILINK软件下,分别运用两种操纵策略对舰载机着舰下滑进行仿真。
2.1 前面操纵策略下滑仿真
前面操纵策略是指飞机在着舰下滑时,飞行员通过操纵驾驶杆来改变飞机下滑角实现轨迹跟踪,通过操纵油门杆来保持飞机的迎角[1]。
假设飞机在着舰下滑过程中初始轨迹偏差分别为10 m,8 m,5 m,飞行员采用前面操纵策略操纵飞机。飞机的下滑轨迹响应特性如图2所示。由图2可知,随着高度误差的减小,飞机消除轨迹偏差所需的时间随之减少,在10 s内飞机轨迹偏差都可减小到2 m以内,并在20 s内基本消除了轨迹偏差。

图2 飞机下滑轨迹响应特性Fig.2 Aircraft glideslope response characteristics
图3和图4为相应轨迹偏差下驾驶杆和油门杆的偏转角度。从图中可以看出,驾驶杆操纵比油门杆操纵平滑,驾驶杆操纵比较平缓柔和,油门杆操纵则快速短促。

图3 驾驶杆偏转量Fig.3 Stick deflection
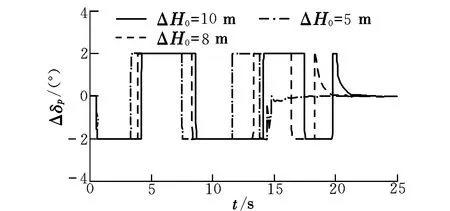
图4 油门杆偏转量Fig.4 Throttle deflection
在舰载机消除轨迹偏差进行轨迹跟踪时,以初始轨迹偏差8 m为例(轨迹偏差为5 m,10 m时的情况与此类似),飞机的γ,α,θ响应特性如图5所示。由图5可知,随着轨迹偏差的减小,其变化量也在减小,并在17 s附近趋于零。这表明飞行员控制飞机进行轨迹跟踪时,飞机姿态没有大的改变,并最终得到了保持。

图5 飞机γ,α,θ响应特性Fig.5 γ,α,θ response characteristics of aircraft
2.2 背面操纵策略下滑仿真
背面操纵策略是指飞行员通过油门杆来改变飞机的下沉率,进而实现轨迹控制,用驾驶杆来保持飞机姿态及加快油门杆的响应。
舰载机着舰下滑条件与2.1节相同,采用背面操纵策略来控制飞机,仿真结果如图6所示。由图6可知,该操纵策略在5 s左右可使飞机的轨迹偏差减小到2 m内,并在15 s时飞行员基本消除了飞机的轨迹误差。此外还可得出,飞机初始轨迹偏差越小,消除误差所需时间越短,轨迹跟踪越平滑。

图6 飞机下滑轨迹响应特性Fig.6 Aircraft glideslope response characteristics
图7和图8为相应高度偏差下驾驶杆和油门杆的偏转角度。由图可知,在背面操纵策略下,与油门杆相比,驾驶杆偏转角度很小,且平滑柔和,油门杆偏转角度相对较大,并且快速短促。
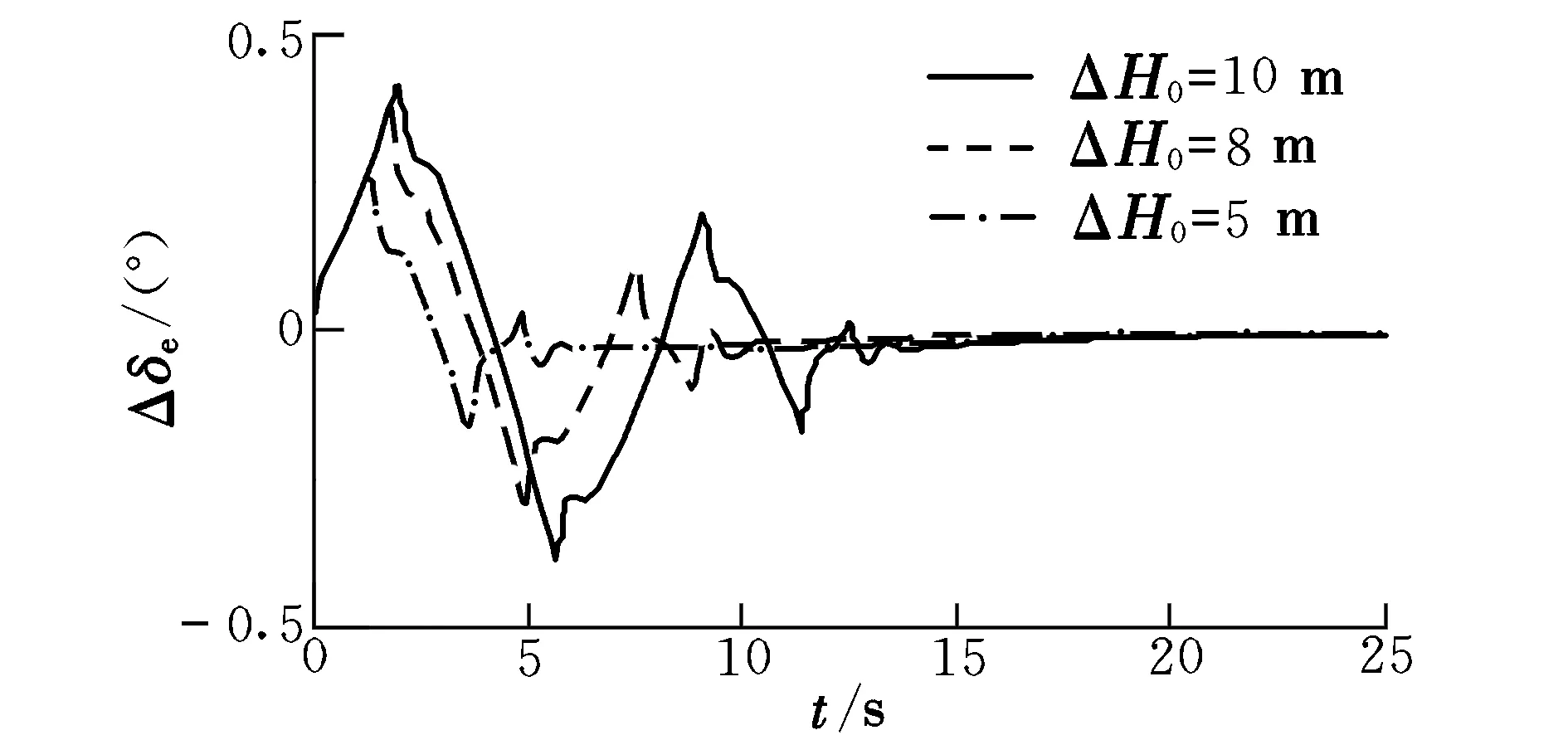
图7 驾驶杆偏转量Fig.7 Stick deflection

图8 油门杆偏转量Fig.8 Stick deflection
以初始轨迹偏高8 m为例,在消除飞机轨迹偏差时飞机的γ,α,θ变化如图9所示。由图9可知,飞机的姿态随着轨迹偏差的减小而恢复到了初值,且在操纵过程中飞机迎角变化较小,飞机姿态保持更佳,符合保角下滑[9]的要求。

图9 飞机γ,α,θ响应特性Fig.9 γ,α,θ response characteristics of aircraft
3 两种操纵策略的比较与分析
由图2和图6对比可知,两种操纵策略都可以控制飞机进行轨迹跟踪,但采用背面操纵策略进行轨迹跟踪所需的调节时间比前面操纵策略短,且前者无超调量,轨迹变化也相对平缓。
此外,由图5和图9可以看出,采取背面操纵策略时,飞机迎角变化量要比采用前面操纵策略时小,其轨迹角对俯仰角的跟踪情况也优于前面操纵策略。
以初始轨迹偏高8 m为例,由图3、图4及图7、图8可以看出,驾驶杆的操纵是比较平缓的,而油门杆则快速短促。驾驶杆偏转角度随轨迹偏差的减小而减小,并且与油门杆的偏转方向相反。此外,从图4和图8中还可得出,采用前面操纵策略时,驾驶杆和油门杆偏转幅度相近;而采用背面操纵策略时,二者相差较大,驾驶杆偏转幅度很小,如图3和图7所示。故将采用背面控制策略下的双通道模型简化为单通道模型,仅通过操纵主通道(副通道不加以控制)来进行轨迹跟踪,在不改变操纵增益的情形下进行仿真。
仿真结果如图10~图12所示。由图可知,当初始轨迹偏差为5 m时,模型简化前后轨迹几近重合,且最终飞机姿态变化也很小,但当初始轨迹误差为8 m时,简化后的模型则无法实现轨迹跟踪。
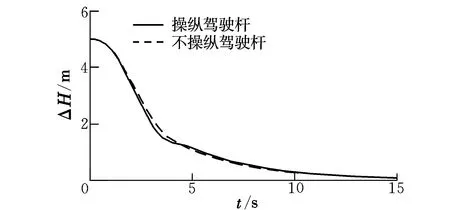
图10 飞机下滑轨迹响应特性(ΔH0=5 m)Fig.10 Aircraft glideslope response characteristics(ΔH0=5 m)

图11 飞机γ,α,θ响应特性(ΔH0=5 m)Fig.11 γ,α,θ response characteristics of aircraft(ΔH0=5 m)
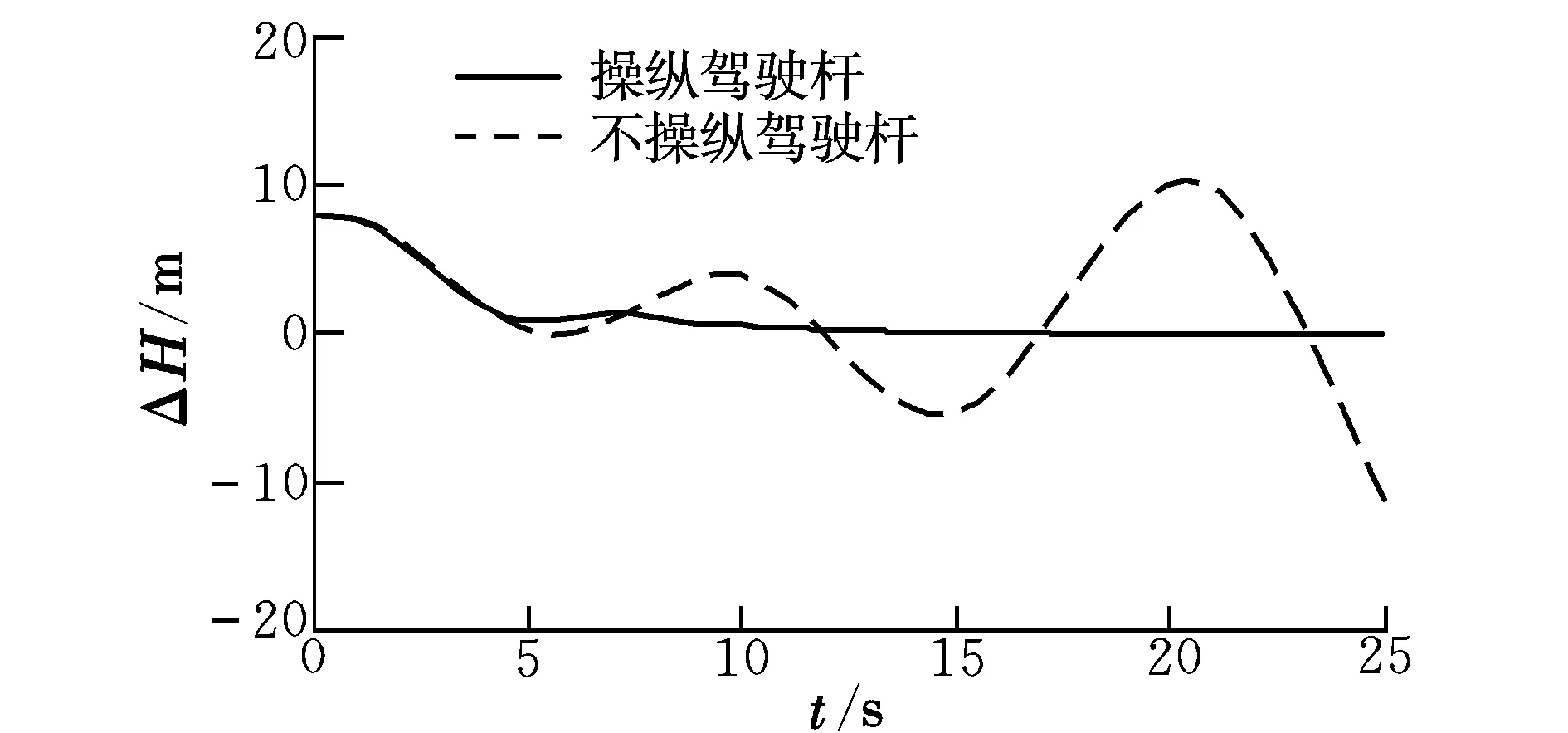
图12 飞机下滑轨迹响应特性(ΔH0=8 m)Fig.12 Aircraft’s glideslope response characteristics(ΔH0=8 m)
4 结束语
本文建立了简化的双通道飞行员跟踪控制任务模型,并结合该模型,在SIMILINK环境下分别运用两种控制策略仿真了着舰下滑时舰载机误差修正历程。
通过综合分析可得,舰载机着舰下滑过程中,飞行员采用两种操纵策略均可以进行轨迹跟踪,但与采用前面操纵策略相比,背面操纵策略所需精力更少,操纵更为简单;此外,在高度误差较小时,采用背面策略操纵飞机,可仅通过偏转油门杆实现轨迹跟踪,不过该情况下飞机的姿态会稍有变化,但当偏差大于一定量时,仅控制油门杆则无法实现轨迹跟踪。
参考文献:
[1] 范晔,袁锁中,杨一栋. 着舰状态飞行员控制策略研究[J].飞行力学,2008,26(3):37-40.
[2] 王新华,杨一栋,朱华.低动压着舰状态下飞机的操纵特性研究研究[J].飞行力学,2007,25(4):29-32,36.
[3] 李鑫,吴文海,王春晖,等.舰载机着舰飞行阶段操纵特性研究[J].飞行力学,2014,32(6):502-505.
[4] 屈香菊.驾驶员控制模型的建模研究[D].北京:北京航天航空大学,2003.
[5] 胡恩勇,袁锁中,杨一栋.跟踪控制状态飞行员建模研究[J].飞行力学,2008,26(4):11-13,18.
[6] Nalepka Joseph P,Hinchman Jacob L.Automated aerial refueling:extending the effectiveness of unmanned air vehicles[R].AIAA-2005-6005,2005.
[7] 徐秋.舰载机进舰环境下驾驶员建模与仿真[D].哈尔滨:哈尔滨工程大学,2012.
[8] Iliff K W,Wang K C.Extraction of lateral-directional stability and control derivatives for the basic F-18 aircraft at high angles of attack[R].NASA Technical Memorandum 4786,1997.
[9] 杨一栋.舰载飞机着舰引导与控制[M].南京:南京航空航天大学出版社,2007:113-117.
(编辑:姚妙慧)
Research of pilot control strategy to pursuit flight path in carrier landing
ZHAO Zhen-yu, HAN Wei, CHEN Jun-feng
(Department of Airborne Vehicle Engineering, NAAU, Yantai 264001, China)
To compare the "frontside" control strategy and "backside" control strategy in carrier landing, a dual-channel pilot model in pursuit tracking flight is established. On the basis of this, the aircraft response characteristics in carrier landing are simulated by using two different control strategies and the SIMILINK software, and the data about carrier aircraft and dual-channel pilot model are received. Through analysis and comparison of data, it is concluded that the "backside" control strategy is easier to use than the "frontside" control strategy to pursuit flight path in carrier landing. When the height error is less than a certain value, the pilot can only control the main channel of model to pursuit flight path if he uses the "backside" control strategy in carrier landing.
pilot model; carrier aircraft; control strategy; path pursuit
2015-03-17;
2015-06-02;
时间:2015-08-17 11:04
赵振宇(1990-),男,山西阳泉人,硕士研究生,研究方向为飞行器动力学。
V249.1
A
1002-0853(2015)06-0519-04
猜你喜欢
昆明医科大学学报(2021年4期)2021-07-23
北京航空航天大学学报(2021年6期)2021-07-20
岷峨诗稿(2020年4期)2020-11-18
汽车电器(2018年8期)2018-08-25
电子设计工程(2015年16期)2015-02-27
科技传播(2014年4期)2014-12-02
教育与职业(2014年31期)2014-01-19
城市道桥与防洪(2013年8期)2013-03-11
发明与创新(2013年24期)2013-02-27
时代农机(2011年10期)2011-08-15
