三维激光扫描技术在煤矿沉陷区监测应用
2015-03-29 02:33李永强刘会云牛路标闫阳阳
测绘工程 2015年7期
李永强,刘会云,毛 杰,牛路标,闫阳阳
(河南理工大学 测绘与国土信息工程学院,河南 焦作454100)
传统的开采沉陷监测中是在沉陷区布设监测点,对沉陷点进行定期和不定期观测,根据监测点的变动信息模拟整个沉陷区的变动状况,进而对未来地表变动规律做出预报。传统开采沉陷技术是最成熟、最可靠的方法,但也有工作量大、成本高、监测点有限且易被破坏等制约因素。近年来测绘领 域 的 一 些 新 技 术,如 近 景 摄 影 测 量[1]、D-In-SAR[2]、测量机器人[3]、GPS-RTK[4]等先后应用到开采沉陷研究中。地面三维激光扫描是测绘领域近些年来快速发展的一项前沿技术,具有数据获取速度快、精度高、非接触、直接获取研究对象表面空间三维数据等优势,对矿区开采沉陷监测具有其独特的优势,科研工作者开展了一系列有价值的研究工作。李秋等[5]在对三维激光扫描数据精度分析的基础上,结合矿区地表沉陷监测,就其技术优势与存在问题进行讨论。戴华阳等[6]应用地面三维激光扫描仪开展了沉陷区房屋移动变形监测研究,验证该技术的可行性。李永强等[7]针对于三维激光扫描仪应用于煤矿区开采沉陷监测问题,提出基于全覆盖表面模型对比分析的思想。吴侃团队[8-12]多年来在三维激光扫描技术应用于开采沉陷监测方面开展了一系列针对性研究,在可行性论证、沉陷盆地数据获取、最佳点云密度、监测精度分析、点云数据处理、沉陷参数求取、沉陷规律预测等方面取得了卓有成效的研究成果。本文在现有研究基础上,结合某煤矿开采沉陷监测应用需求,采用三维激光扫描技术与传统观测相结合的方法,对监测区域内的采空区、铁路线、铁路桥的沉降和变形进行试验研究。
1 基本原理
面阵密集点云是地形三维激光扫描技术的最大优势,由面阵密集点云构建的地物表面模型不但精细表达了地物的局部细节特征,而且各局部之间有着非常准确的空间拓扑关系。三维激光扫描仪能快速获取变形监测对象表面密集的点云数据,通过数据处理,获取对象精细三维表面模型,这构成变形监测的基础,通过对变形监测对象两期或多期观测数据的对比分析,能快速准确地确定监测对象各部分的形变状况。煤矿开采沉陷区作为一种典型的变形体,也表现出面状变化的特点,尽管传统开采沉陷监测的理论和方法已经发展得比较成熟,但有限的监测点很难完全真实准确地反映出整个监测表面各部分的变形状况。三维激光扫描技术的监测方法虽然能真实反映整个表面的变化状况,但基于该技术的开采沉陷监测研究尚处于探索研究阶段,必须联合传统监测方法,充分发挥各自优势,并相互印证,才能更真实、准确达到变形监测的目的。
2 数据获取
本文进行两期数据采集:第一期数据采集时间为2013年1月 使用Leica HDS4400型三维激光扫描仪,第二期数据采集时间为2013年11月,使用Leica TC802型全站仪配合FARO Focus3D型三维激光扫描仪。两期数据采集均采用先布设控制网,再进行激光扫描的方式。
2.1 第一期数据采集
1)控制网布设:以已知点K1为起算点,观测K1,A12,A8,B7,Z1,Z2闭合导线。其中A12,A8,B7为已布设的监测点,Z1,Z2为临时点;以K2为起算点,在桥两侧加测2个临时点f1,f2。
2)激光扫描仪数据采集:分别在K1,A12,A8,B7,Z1,Z2,K2,f1,f2点上架 设 激 光 扫描仪,采用360°扫描方式,获取整个试验区激光扫描点云数据,这些数据能完整覆盖整个监测区域,如图1(a)所示。
2.2 第二期数据采集
1)控制网布设:以已知点k1,k2为起算数据,加测3个临时点Z1,Z2,Z3组成闭合导线,如图1(b)所示。
2)激光扫描仪数据采集:在已知点Z1,K1,K2上架设全站仪,在激光扫描仪测站附近放置4个反射标靶,在扫描的同时通过全站仪精确观测4个标靶的三维坐标。共进行21站数据采集。

图1 两期激光扫描数据采集
3 数据处理
3.1 数据整合与坐标统一
Leica HDS4400激光扫描仪通过设置架站点和照准点坐标,由自身所带软件自动把所有点都统一在相同的大地坐标系下。FARO Focus3D激光扫描仪能精确获取半径30 m的密集点云,同时获得每个测站周围四个标靶的三维坐标,四个标靶的坐标由全站仪精确观测,通过同名点求得相关转换参数,分别把每测站点云转换为大地坐标,21测站数据即统一在相同坐标系下。两期观测均以K1,K2为起算数据,K1,K2坐标在扫描数据的近期精确观测,为已知坐标,把两期的观测数据统一在相同坐标系内。
3.2 噪声滤除
对激光扫描点云数据处理的目的是获取地表面精细三维模型,滤除树木、低矮植等噪声点,分两个步骤完成:
1)分区人工交互滤波:根据扫描区域的平面坐标,将整个扫描区域分为64个分区,将每个分区数据加载到Cyclone软件中,根据熟练操作人员的经验判断,采用人工交互方式,对比较明显的指标点,如树、灌木等进行滤波,所有分区滤波后重新合并为一个整体。
2中值法滤除低矮植被 考虑到扫描区域内的低矮植被,以及局部微小地形(0.1 m×0.1 m)内存在一定差异,将扫描区域划分为0.1 m×0.1 m格网,对落在每个格网内的数据取中值,滤去其它数据点,即可完成低矮植被噪声的滤除,同时适当简化了密度过大的点云。
3.3 表面建模
地形三维激光扫描仪所获取地表数据存在不均匀性,靠近测站区域数据点密度比较大,随着距离的增加,扫描点的密度逐渐减小,部分遮挡区域甚至缺失数据 采用克里金插值法对数据进行处理,以0.2 m×0.2 m为间隔对扫描区域进行数据重采样,获取精细三维表面模型。
4 数据分析
激光扫描数据覆盖铁路线及其北面的350 m×200 m区域,如图2所示。根据实际数据获取情况及监测要求,对三个试验对象(矩形地表沉降试验区、铁路线、铁路桥)进行分析研究。

图2 采空区地表沉降分析
4.1 地表沉降试验区
采空区主要分布在铁路线北面,该区域地表受采动影响比较大,地表为地势平坦的空旷麦田。选择图2(a)中虚线框部分为试验对象,该区域为200 m×120 m的矩形区域,基于密集激光点云构建0.2 m×0.2 m地表精细三维表面模型,两期表面模型分别如图2(b)和图2(c)所示。可以看出,试验区内地表面被精细表达出来,道路、麦隆、沟坎等信息都精确描述出来。两期表面模型在高程上的差值即为地表的沉陷值,基于差值分析,即可从整体上获取整个区域地表变动状况。图2(d)为基于差值的表面模型,可以看出,整个区域呈现北高南低的趋势,东北角略高于西北角,这与传统观测结果相符。由于两期观测数据间隔将近一年时间,地表耕种造成局部的小幅度变动(如麦隆)在图2中可以清晰表达出来,但这些变动不会对整体的地形变化造成影响。为进一步验证差值精度,在该区域内分布观测点A11,A13,A14,如图2(d)中所示,依据精密水准观测,三个点的下沉量分别为0.127 m、0.046 m、0.048 m,在沉降表面模型中,求取每个点所在位置周围半径1 m的区域内所有点的平均值,作为该点处的下沉量,所得下沉量分别为0.131 m、0.064 m、0.061 m,与传统观测较差分别为4 mm、18 mm、13 mm,进一步验证基于三维激光扫描构建精细表面模型进行沉降量描述的可靠性。
4.2 铁路线
铁路线边坡上覆盖浓密的植被,很难从有限的三维激光扫描点云中探测出其表面变动情况,采用断面线对比的方式:从两期激光扫描点云中均匀选择一系列铁轨顶端点云数据,基于这些点云数据,构建铁轨顶部断面线,通过两期断面线的对比分析得到铁轨的整体沉降状况。
从第一期点云数据中,内、外两侧铁轨顶端分别选择39和36个数据点,从第二期点云数据中,左右两侧铁轨顶端分别选择84和72个扫描点。两期内外两侧轨道高程沿Y方向的曲线如图3(a)和图3(b)所示,从图3中可以看出,外侧铁路线相对于内侧铁路线在整体上高出4~5 c m,这正符合铁轨弯道外侧高 内侧低的状况 而随着Y值的增加 弯 道变为直线 轨道两侧高程值基本相等
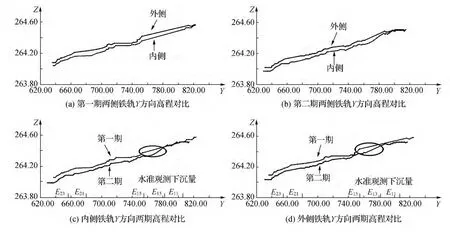
图3 铁路线沉降
内侧两期高程曲线对比如图3(c)所示,外侧两期高程曲线对比如图3(d)所示,可以看出,两侧铁轨均有所下沉,下沉量为3~6 c m。为进一步验证数据的可靠性,与传统观测数据进行对比分析,在铁路线内侧枕木上,进行了5个水准观测,分别为E23,E21,E15,E13,E11下沉量如图3(c)中所示,同样,在铁路线外侧枕木上,进行了5个水准观测,分别为D23,D21,D15,D13,D11下沉量如图3(d)中所示,从图中可以看出,基于激光扫描点的下沉量与基于传统下沉量有很好的一致性。图3(c)和图3(d)中圈选部分下沉量存在误差,主要原因是第一期观测数据在这个地方缺失较多,难以获得有效数据点。
4.3 铁路桥
由于第一期对铁路桥激光扫描数据相对稀疏,无法构建该桥精细三维表面模型,同时为了避免多站点云数据拼接造成的误差,因此基于单站点云的对比来判断桥梁的整体形变。两期观测都分别在桥梁的顶部、左侧、右侧三个方向进行了设站观测,分别对比三个方向的点云来确定桥梁的变动情况。图4(a)为桥梁照片,图4(b)、图4(c)、图4(d)分别为桥梁顶部、桥梁左侧、桥梁右侧点云对比效果图,从图4中可以看出:铁路桥整体结构稳定,在顶部、左侧、右侧均没有出现位移、扭曲、形变等状况,也就是铁路桥受采动影响很小 尚没有达到可以探测出来的程度。用传统观测方式对桥面、桥墩布设监测点的观测结果来看,该铁路桥仅有1 c m的整体下沉,这与上述分析结果是一致的。

图4 铁路桥点云对比效果
5 结束语
本文结合煤矿开采沉陷监测实际工程,采用三维激光扫描技术与传统观测技术相结合的方式,获取开采沉陷区两期精细三维点云数据,在对激光点云数据预处理和数据分析基础上,分别对采空区地表沉降、铁路线沉降、铁路桥沉降与形变监测进行了研究,并与传统观测结果进行对比分析,两种观测技术的结果具有较好的一致性。采用三维激光扫描进行开采沉陷监测研究,除发挥其数据获取方面的优势外,还需要做好数据后处理的研究工作,更加深入地研究数据后处理的理论、方法和技术,加强与其它理论方法(空间场、空间匹配、稳健估计、有限元等)的融合,使其成为一个更加开放的方法体系。
[1] 盛业华,闫志刚,宋金玲.矿山地表沉陷区的数字近景摄影测量监测技术[J].中国矿业大学学报,2003,32(4):411-415.
[2] 吴立新,高均海,葛大庆,等.工矿区地表沉陷D-InSAR监测试验研究[J].东北大学学报:自然科学版,2005,26(8):778-782.
[3] 候建国 杨成生 王亚男 等.煤矿开采沉陷监测 基于合成孔径雷达差分干涉测量的研究[J].自然灾害学报,2009,18(6):71-75.
[4] 马振利,吉长东,任东风.GPS与测量机器人联合作业模式在露天矿变形监测中的应用[J].矿山测量,2007(1):41-42.
[5] 李秋,秦永智,李宏英.激光三维扫描技术在矿区地表沉陷监 测 中 的应 用 研 究[J].煤 炭 工 程,2006(4):97-99.
[6] 戴华阳,廉旭刚,陈炎,等.三维激光扫描技术在采动区房屋变形监测中的应用[J].测绘通报,2011(11):44-46.
[7] LI Yongqiang,LIU Huiyun,WEI Fengyuan.Research on Techniques and Methods of 3D Laser Scanning Monitoring Coal Mining Subsidence[J].室蘭工業大学紀要2010(59):115-118.
[8] 张舒,吴侃,王响雷,等.三维激光扫描技术在沉陷监测中应用问题探讨[J].煤炭科学技术,2008,36(11):92-95.
[9] 于启升,吴侃,郑汝育.利用三维激光扫描数据求取开采沉陷预计参数研究[J].地矿测绘,2010,26(2):1-3.
[10]胡大贺,吴侃,陈冉丽.三维激光扫描用于开采沉陷监测研究[J].煤矿开采,2013,18(1):20-22,35.
[11]陈冉丽,吴侃.三维激光扫描用于获取开采沉陷盆地研究[J].测绘工程,2012,21(3):67-70.
[12]周大伟,吴侃,唐瑞林,等.点云密度对地面三维激光扫描精度及沉陷参数的影响[J].金属矿山,2011(9):127-130.
猜你喜欢
河南科技(2022年9期)2022-05-31
建材发展导向(2019年10期)2019-08-24
模具制造(2019年3期)2019-06-06
建筑科技(2018年6期)2018-08-30
红领巾·成长(2017年3期)2017-05-03
工程建设与设计(2016年2期)2016-08-22
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
铁道科学与工程学报(2015年4期)2015-12-24
现代营销·经营版(2015年3期)2015-04-20
现代营销·经营版(2013年5期)2013-05-14