
基于ARM 的远程控制器应用开发①
2015-04-14 08:06王鹏
佳木斯大学学报(自然科学版) 2015年5期
王 鹏
(江苏国电南自海吉科技有限公司,江苏 南京,210000)
0 引 言
物联网(IoT)是利用局部网络或者互联网等通信技术把传感器、控制器、设备、人和物等通过一定的方式联结在一起,最终形成人与物、物与物相联的远程管理控制、信息化与智能化的网络[1].
1 系统硬件平台的设计与应用分析
本控制系统的硬件主要有以下几个部分组成:以LPC2368 ARM7 处理器为核心的嵌入式监测控制中心,以DM9161A 以太网PHY 芯片或GPRS 模块为核心的网络通信部分,以EPM240 芯片为核心的CPLD 继电器控制模块,以及各种执行设备,参见文献[2]给出的控制器结构框架图.
1.1 LPC2368 外围电路的设计
根据物联网控制器的实际要求,结合LPC2368的片内资源,设计LPC2368 外围电路,如图1 所示.
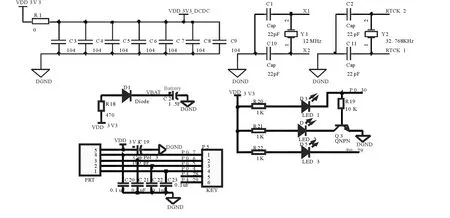
图1 LPC2368 外围电路
1.2 DM9161A 以太网模块电路设计
DM9161A 是一个10M/100M 以太网PHY 收发器,它支持MII 和RMII 接口,在这里使用的是RMII 接口.DM9161A 的RMII 接口包括发送数据脚TXD[0]、TXD[1],发送使能脚TXEN,接受数据脚RXD[0]、RXD[1],接受数据时钟脚RXCLK,接受错误数据RXEN,这些脚和MII 管理接口的管理数据时钟脚MDC、管理数据I/O 脚MDIO 等与LPC2368 的对应脚相连.此外,一些管脚的上拉或下拉电阻主要是用于配置DM9161A 的运行状态.PWRDWN 脚下拉表示DM9161A 不会进入掉电模式;MDINTR 脚的上拉表示中断的输出低电平有效;COL/RMII 的上拉表示DM9161A 工作在RMII接口模式;BGRES 和BGRESG 脚之间的6.8kΩ 的电阻是用于调整DM9161A 的网络驱动能力,XT1和XT2 为时钟输入脚,因为使用RMII 接口,所以时钟输入是50MHz,选用50MHz 的有源晶振,通过XT2 输入,XT1 悬空.

图2 独立控制的RS485 串行通信电路图
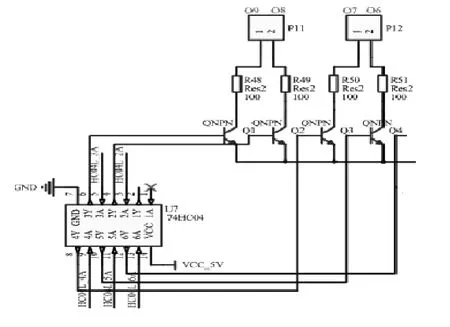
图3 开关量输出
1.3 RS485 串行通信电路设计
利用RS485 自动换向原理设计3 路RS485 串行通信电路,参见文献[3]给出的电路图.
该电路充分的利用了B0505LS DC-DC 隔离电源芯片和6N137 光耦隔离芯片,B0505LS 可以产生一个单独的电源,6N137 芯片是高速光耦隔离芯片,速度可达10Mbit/s,电路中包括2 个6N317 芯片和1 个B0505LS 芯片,利用B0505LS 芯片制造一个电源单独给MAX485 以及用于LPC2368 传输数据隔离的光耦供电,另一个用于数据接收隔离的光耦用3.3V 电源供电.当RS485_TXD1 信号为“1”时,对应的6N137 光耦芯片输出VO 为“1”,因此加在MAX485 DI 上的信号为“1”,DCT2 三极管集电极和发射极导通,使得RE、DE 上的信号都为“0”,自动禁能MAX485 发送器,使能MAX485 作为接受器准备接受数据;当RS485_TXD1 信号为“0”时,对应的6N137 光耦芯片输出VO 为“0”,因此加在MAX485 DI 上的信号为“0”,DCT2 三极管集电极和发射极断开,使得RE、DE 上的信号都为“1”,自动禁能MAX485 接收器,使能MAX485 作为发送器发送数据.
这一种RS-485 自动换向电路可能并不适合所有的RS485 应用,因此利用光耦PC817 隔离芯片单独控制1 路的RS485 通信,电路图如图2 所示.利用LPC2368 的P0.8 GPIO 口输出对光耦PC817 的控制进而控制RS485 是作为发送器还是接收器,当P0.8 输出“1”时,使RE、DE 上的信号都为“1”,使能MAX485 作为发送器,当P0.8 输出“0”、RS485_TXD2 上的信号为“1”时,使能MAX485 作为接受器.RS485_TXD2 与LPC2368 的P2.0 口相连,使能P2.0 口为TXD1 功能.
1.4 开关量输入输出模块
开关量输出模块主要是用于控制继电器模块开关的通断,电路原理图如图3 所示.此处利用了2 片74HC04 反相器,因为是使用9013 NPN 型三极管的做开关来控制输出,三极管的集电极作为输出,也就是当基极与发射极之间电势差为高电平时开关输出为低电平,也就是LPC2368 的GPIO 口输出低电平时,经过反相器和三极管作用使最终输出为低电平,而当集电极与发射极之间的电势差为低电平时,由于集电极与发射极之间不导通,因此输出口处于高阻态状态,这样保证了开关量只能输出低电平,确保了对继电器进行可靠的控制,加入74HC04 反相器的目的是提高输出电路的驱动能力,同时也能起到隔离保护作用.
开关量输入模块如图4 所示.该部分利用PC817 光耦隔离输入可用于检测其他电路的工作状态.
1.5 继电器控制模块
继电器控制模块是整个控制器系统最重要的模块之一,控制器通过控制这个模块上继电器的通断对一些设备进行控制,继电器控制模块中加入了一块Altera 的MAX II 系列的EMP240 CPLD 芯片,可以用于其它功能的扩展,在此,我们只需要利用CPLD 芯片编程实现简单的逻辑门电路对继电器进行控制.
1.5.1 EMP240 CPLD 芯片外围电路设计
采用SPSS 19.0软件进行统计分析。计数资料用%表示,计量资料采用表示。组间计数资料采用χ2检验;计量资料两两比较采用t检验,三组间比较采用方差分析。变量间的相关性分析采用Pearson线性相关分析。所有统计结果以P<0.05为差异有统计学意义。
EMP240 CPLD 芯片属于Altera 的MAX○R II系列CPLD 芯片,MAX○R II 具有I/O 口数量多,速度快,以及与其他CPLD 架构连接可靠性高等优点.Altera 的MAX○R II 系列芯片配备的有MultiVol内核,用户闪存(UFM)模块,和强化的系统可编程(ISP)功能,旨在降低成本和功耗的同时,提供更多可编程解决方案的应用,如总线连接,I/O 扩展,上电复位(POR)、顺序控制和设备配置的控制.
EMP240 具有240 个宏单元,采用3.3V 电压供电,用在这里主要是用于LPC2368 ARM 控制器的I/O 扩展作用,相当于译码器替LPC2368 完成外部引脚资源扩展、输入输出时序管理,LPC2368通过EMP240 CPLD 芯片对继电器通断进行控制.
1.5.2 输入部分整形电路设计
为了提高对继电器控制的准确性和可靠性,利用CD40106BM 施密特触发器对输入的信号波形进行整形,去除信号中的谐波部分,得到平稳的直流控制信号.控制器输出部分通过PC817 光耦隔离输出给CD40106BM
1.5.3 继电器电路
继电器电路的控制输入端连接的是EMP240 CPLD 芯片,通过EMP240 编程简单逻辑电路输出控制继电器的通断,.继电器型号采用NT75-2C-DC12-S-0.41-S,其额定电压为12V,吸合电压为8.4V,释放电压为1.2V,触电负载为5A250VDC.

图5 控制器软件模块示意图
2 控制器软件部分设计
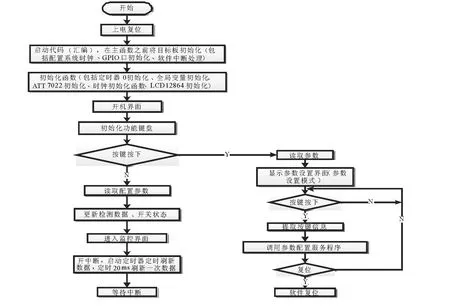
图6 系统软件主程序部分
2.1 控制器软件总体设计方案
由于LPC2368 ARM 芯片的片内资源丰富,内部有实时时钟(RTC)和以太网控制器,因此时钟模块的直接利用LPC2368 内部的RTC 去实现,主要是配置RTC 的相关寄存器利用RTC 中断实现,在此不做说明,DM9161A 以太网芯片的驱动利用LPC2368 以太网控制器控制,GPRS 模块直接与控制器RS485 串口相连实现数据交换,LCD12864 模块通过GPIO 口驱动,ATT7022CU 模块通过GPIO口模拟SPI 时序驱动.
LPC2368 属于ARM7 系列芯片,因此可以通过移植μC/OS-II 实时操作系统的方法提高LPC2368 的利用率和实时控制,利用μC/OS-II 的微小内核实现任务之间的切换,由于只移植μC/OS-II 的内核,涉及到外围电路的驱动程序就需要自己编写,这样难度较大,因此本设计中软件部分未能采用移植μC/OS-II 实时操作系统的方法实现,在以后对μC/OS-II 实时操作系统有了深入了解之后可以采用此方法进行软件设计,可以提高CPU 的执行效率.在此我们采用直接编程的方法来实现各个模块的控制,控制器软件模块示意图如图8 所示.
2.2 控制器软件主程序设计
控制器在上电复位后,根据需要调用相关函数完成系统的启动、初始化并进入中断模式开始正常工作,产生中断后将系统控制权转交给产生中断对应的中断服务程序,中断服务程序执行完后返回,释放系统控制权,继续等待中断.控制器主程序设计流程图如图6 所示.
3 总 结
采用LPC2368 ARM7 作为主控制器大大的提高了物联网控制器的性能,LPC2368 片内有以太网MAC 控制器,通过MAC 控制器控制外部PHY 芯片可以实现高速的网络数据传输,LPC2368 还可以通过串口连接GPRS 模块进行数据传输,控制器电路经过适当的修改可以应用于城市路等智能控制、远程智能家居的控制、远程农业监控;目前的不足之处主要在于控制器软件编程部分,如果能够成功移植μC/OS-II 实时操作系统,对于CPU 的利用资源分配以及系统实时性有一个质的改变,不过由于硬件平台的不同,只能移植μC/OS-II 实时操作系统的微小内核,对于外围的硬件驱动部分只能自己编写,因此开发难度较大,需要后续对ARM7以及μC/OS-II 嵌入式系统有深入学习之后再做开发.
[1] DU Kun-kun,WANG Zhi-liang,HONG Mi.Human machine interactive system on smart home of IoT[J].The Journal of China Universities of Posts and Telecommunications,2013,20(1):96-99.
[2] Zhang Guiqing,Duan Xingchao,Wang Mingand Li Chengdong.Controller Design for the Internet of Things for Building Electrical Equipments[J].Power Engineering and Automation Conference(PEAM),2012 IEEE.
[3] 潘群,向军,王琳.RS-485 串行通信接口电路的设计与应用[J].常州工学院学报,2009,22(3):38-42.
猜你喜欢
电子与封装(2022年9期)2022-10-12
电气电子教学学报(2022年3期)2022-07-30
轨道交通装备与技术(2021年5期)2021-11-19
装备制造技术(2020年1期)2020-12-25
长春师范大学学报(2019年2期)2019-02-27
汽车维修技师(2018年7期)2018-12-07
电子制作(2017年24期)2017-02-02
核技术(2016年3期)2016-04-19
电源技术(2015年7期)2015-08-22
中国交通信息化(2015年11期)2015-06-06
