
基于迭代学习理论的智能铲运机运动轨迹控制算法研究*
2015-04-19 02:03姜勇
机械制造 2015年11期
□姜勇
北京矿冶研究总院 北京 100160
迭代学习控制采用“在重复运动过程中学习”的控制策略,具有系统记忆功能和经验修正功能,适用于具有重复运行特性的被控对象[1-3]。智能铲运机在井下巷道的工作区域内,进行铲装、运输、倾倒等动作,工作流程比较固定,尤其是运输过程,行驶路径相对固定且重复进行,恰好与迭代学习控制理论中被控对象的特性吻合。为了提高运动轨迹的控制精度,笔者运用迭代学习控制理论,提出一种应用于智能铲运机运动轨迹控制的新算法,通过对迭代过程中的控制参数进行学习,可实现对运动轨迹的精确控制。
1 迭代学习控制算法及基本理论
迭代学习控制是通过对被控对象进行控制的尝试,利用输出轨迹与给定轨迹之间的偏差作为反馈量来修正前期不理想的控制信号,产生新的控制信号,从而使系统的跟踪控制性能得到提高[4-6]。被控系统的动态模型如下[7]:

式中:x⊂Rn×1、y⊂Rm×1、u⊂Rr×1分别为被控系统的状态向量、输出向量以及控制向量;f、g为具有相应维数的函数,结构和参数均未知。
要求系统在时间域 t∈[0,T]内的输出 y(t)尽可能地跟踪期望输出 yr(t),假定期望控制向量 ur(t)是存在的,即:在给定初始状态值 x(0)下,ur(t)是式(1)当 y(t)=yr(t)时的解。迭代学习控制的目标就是通过多次重复的运行,在一定的学习律下使 u(t)→ur(t),y(t)→yr(t)。 在第 k 次运行式(1)表示为:

跟踪误差为:

式中:下标k表示第k次运行,假设每次运行过程中期望输出 yr(t)一直保持不变。
2 开环和闭环迭代学习控制算法
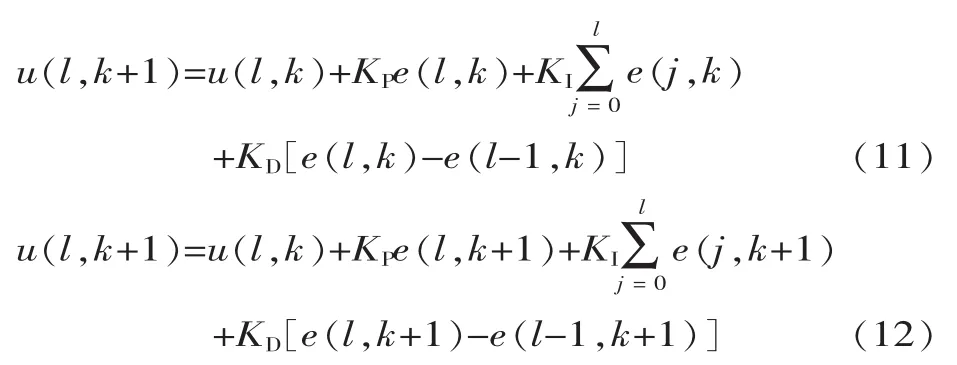
迭代学习控制可以分为开环迭代学习和闭环迭代学习两种,学习律有多种,笔者采用PID型学习律[8]。
2.1 开环控制算法
开环迭代学习控制算法如式(4)所示:第k+1次的控制量等于第k次的控制量加上第k次输出误差的比例、积分和微分项的线性组合量,即:

式中:KP、KI、KD分别为比例因数、积分因数和微分因数。开环迭代学习控制算法的基本结构如图1所示。
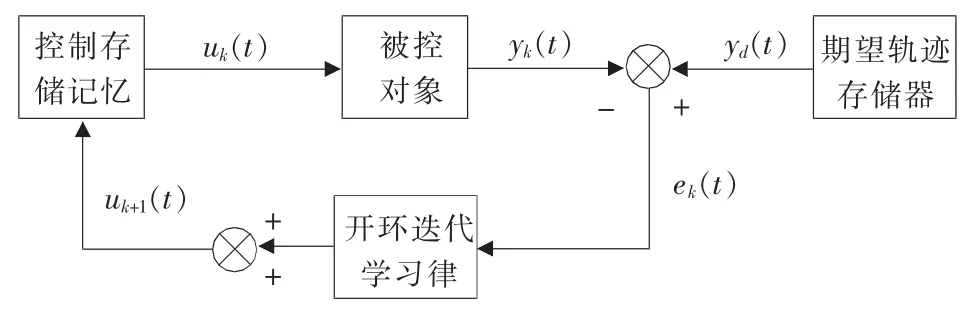
▲图1 开环迭代学习控制算法结构框图
一般的开环迭代学习控制算法可以写成:

式中:L为线性或非线性算子。
2.2 闭环控制算法
闭环迭代学习控制算法如式(6)所示,取第k+1次运行过程的误差作为反馈修正项,即:

闭环迭代学习控制算法的基本结构如图2所示。
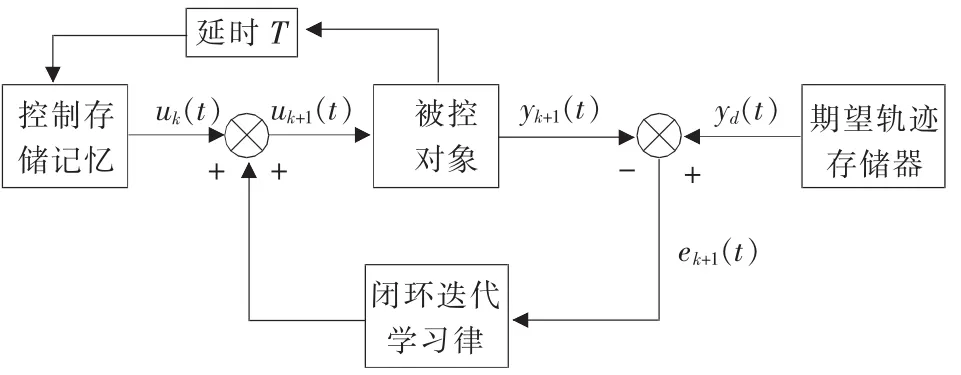
▲图2 闭环迭代学习控制算法结构框图
一般的闭环迭代学习控制算法可以写成:

2.3 迭代学习控制算法的离散化
将开环和闭环控制算法分别离散化处理,式(1)变为:

在第k次运行时可以表示为:

输出误差为:

离散化的开环和闭环迭代学习控制算法为:
离散化的开环和闭环一般的学习控制算法形式为:

开环迭代学习控制算法采用的是离线计算方法,因此对系统的计算要求并不高,它采用的是系统上一次的输出误差,因而控制效果没有闭环迭代控制算法好。闭环迭代学习控制需要在线计算,因而对系统要求较高。
3 基于迭代学习的智能铲运机运动轨迹控制模型的设计
3.1 智能铲运机极坐标下运动轨迹模型的建立
以智能铲运机为研究对象,建立铲运机的运动轨迹模型如图3所示。图中,以井下巷道的路面作为坐标平面建立正交坐标系,铲运机定位参考点在此坐标平面上的投影点为P,该点的速度方向 (即轨迹切线方向)就是行驶方向,该方向与X轴正方向形成的夹角定义为航向角β,以X轴逆时针旋转时形成的航向角为正,反之为负。图中A为目标路径(即期望轨迹),B为实际运行轨迹。P点在目标路径上的垂直投影点为Pd,将该点的速度方向与X轴正方向之间所形成的夹角定义为目标路径的航向角βd。将目标路径上的航向角βd与实际运行轨迹上的航向角β之间的差值定义为航向角偏差Δβ,这一参数反映了铲运机在运动过程中,其运动方向与目标路径预定的行驶方向之间的偏差。铲运机实际运行轨迹上P点与目标路径上Pd点的距离定义为横向位置偏差δ,以P点在目标路径曲线左侧时的横向位置偏差为正,反之为负。该参数反映了铲运机在行驶过程中巷道内的横向定位情况 (即轨迹偏离情况)。铲运机的铰接转向角为α,即铲运机前后车体之间的相对转角,以使铲运机顺时针方向转动的角度为正,反之为负。转向角和转向角变化速率决定了转向半径的大小和实际运动行驶轨迹,铲运机在行驶过程中通过调整铰接转向角的大小来实现对运动轨迹的控制。以航向角偏差Δβ和横向位置偏差δ来表示定位参考点P点的位置坐标,即P(Δβ,δ)。P点的行驶车速为Vp,与实际运行轨迹曲线B相切,而目标路径上Pd点的投影车速为Vd,与轨迹曲线A相切。
行驶过程中,通过控制行驶速度、转向角度以及转向角变化速率来实现对铲运机的运动轨迹控制。 因此,决定铲运机运动轨迹的因素主要有行驶速度、转向角度以及转向角变化速率这3个变量。
3.2 开环迭代学习运动轨迹控制模型
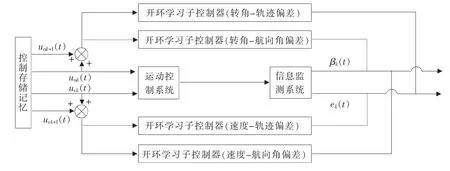
利用开环迭代学习控制算法的基本原理来实现自主行驶过程中的运动轨迹控制,选取转向角度α和行驶速度Vp两个量作为输入控制量,同时选取航向角偏差β和运动轨迹偏差e这两个参数作为迭代学习的反馈修正量,建立开环迭代学习运动轨迹控制模型。开环迭代学习运动轨迹控制模型结构框图如图4所示。
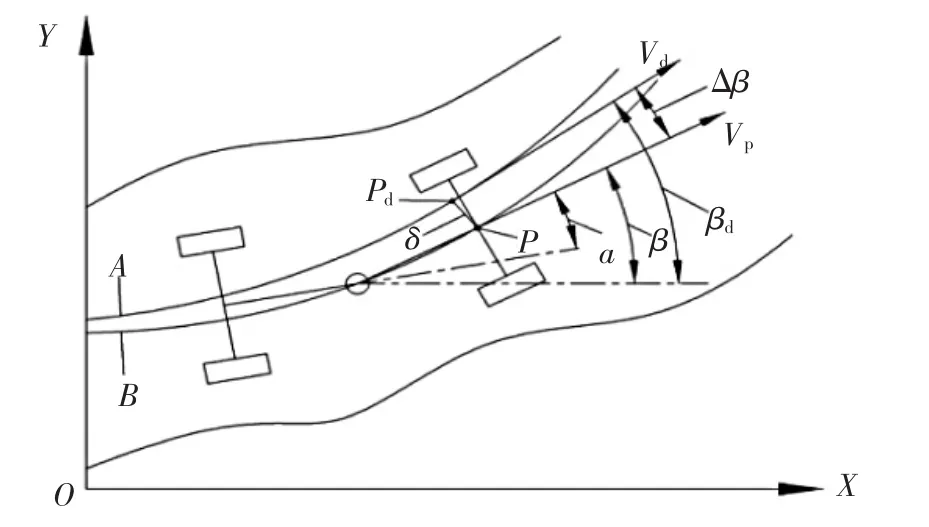
▲图3 智能铲运机运动轨迹模型
开环迭代学习控制器由4个子控制器组成,分别介绍如下。
(1)开环学习子控制器(转角-轨迹偏差)。利用行驶过程中的运动轨迹偏差作为反馈修正量,实现对转向角度控制量的迭代学习控制。
(2)开环学习子控制器(转角-航向角偏差)。利用行驶过程中的航向角偏差作为反馈修正量,实现对转向角度控制量的迭代学习控制。
(3)开环学习子控制器(速度-轨迹偏差)。利用行驶过程中的运动轨迹偏差作为反馈修正量,实现对行驶速度控制量的迭代学习控制。
(4)开环学习子控制器(速度-航向角偏差)。利用行驶过程中的航向角偏差作为反馈修正量,实现对行驶速度控制量的迭代学习控制。
开环迭代学习运动轨迹控制模型设计如下:
式中:KP1、KI1、KD1分别为开环学习子控制器 (转角-航向角偏差)的参数;KP2、KI2、KD2分别为开环学习子控制器(转角-轨迹偏差)的参数;KP3、KI3、KD3分别为开环学习子控制器(速度-航向角偏差)的参数;KP4、KI4、KD4分别为开环学习子控制器(速度-轨迹偏差)的参数;uαk+1(t)、uvk+1(t)分别为第 k+1 次迭代学习转向角度和行驶速度的控制量;uαk(t)、uvk(t)分别为第 k 次迭代学习转向角度和行驶速度的控制量。
考虑到计算机控制系统采用的是数字控制,因此对其进行离散化处理,离散化后的控制模型为:
3.3 闭环迭代学习运动轨迹控制模型
闭环迭代学习控制算法同样选取转向角度α和行驶速度Vp作为输入控制量,同时选取航向角偏差β和运动轨迹偏差e这两个参数作为迭代学习的反馈修正量,建立闭环迭代学习运动轨迹控制模型。闭环迭代学习运动轨迹控制模型结构框图如图5所示。其中闭环学习控制器由4个子控制器组成,分别介绍如下。
(1)闭环学习子控制器(转角-轨迹偏差)。利用行驶过程中的运动轨迹偏差作为反馈修正量,实现对转向角度控制量的迭代学习控制。
(2)闭环学习子控制器(转角-航向角偏差)。利用行驶过程中的航向角偏差作为反馈修正量,实现对转向角度控制量的迭代学习控制。
(3)闭环学习子控制器(速度-轨迹偏差)。利用行驶过程中的运动轨迹偏差作为反馈修正量,实现对行驶速度控制量的迭代学习控制。
(4)闭环学习子控制器(速度-航向角偏差)。利用行驶过程中的航向角偏差作为反馈修正量,实现对行驶速度控制量的迭代学习控制。
闭环迭代学习运动轨迹控制模型设计如下:
▲图4 开环迭代学习运动轨迹控制模型结构框图
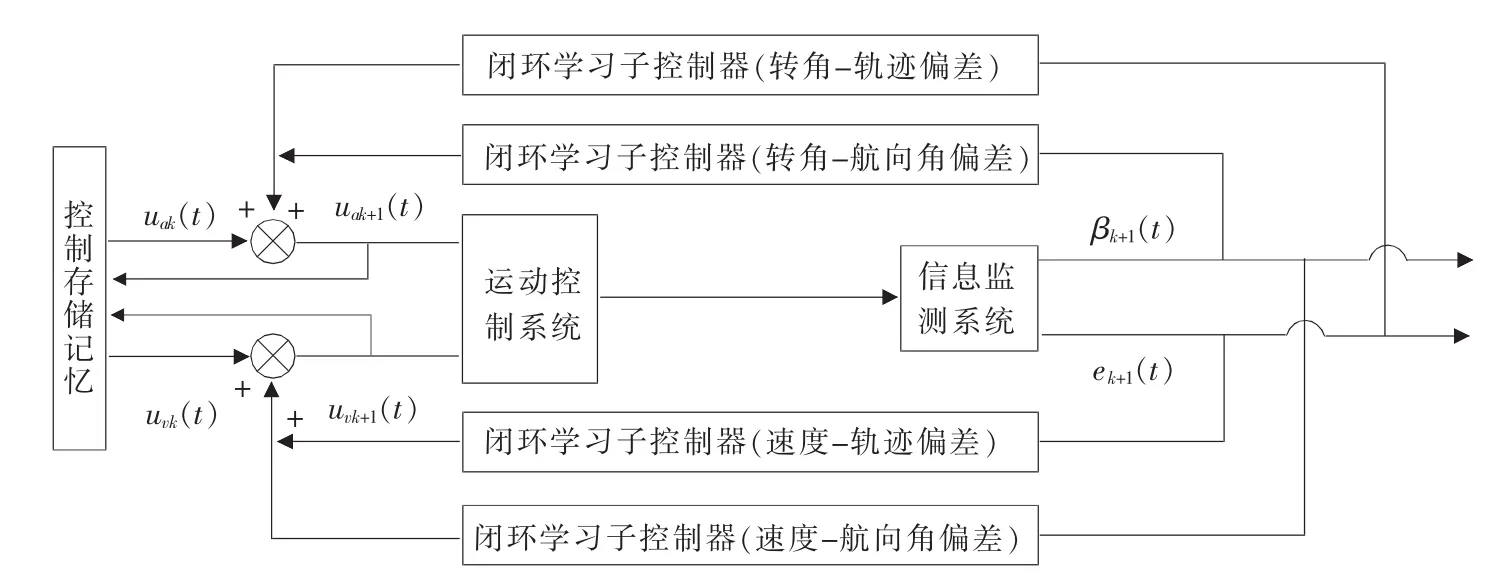
▲图5 闭环迭代学习运动轨迹控制模型结构框图

式中:KP1、KI、KD1分别为闭环学习子控制器 (转角-航向角偏差)的参数;KP2、KI2、KD2分别为闭环学习子控制器(转角-轨迹偏差)的参数;KP3、KI3、KD3分别为闭环学习子控制器(速度-航向角偏差)的参数;KP4、KI4、KD4分别为闭环学习子控制器 (速度-轨迹偏差)的参数;uαk+1分别为第k+1次迭代学习转向角度和行驶速度的控制量;uαk(t)、uvk(t)分别为第 k 次迭代学习转向角度和行驶速度的控制量。
同样对其进行离散化处理,得到离散化的控制模型为:
4 结论
基于迭代学习控制的基本原理,提出一种控制智能铲运机运动轨迹的开环迭代学习控制算法和闭环迭代学习控制算法。智能铲运机在运输路径上重复运行,利用其每次迭代运行过程中的航向角偏差和轨迹偏差作为反馈修正量,不断地修正其在期望轨迹上的轨迹偏差,从而保证铲运机尽可能准确地跟踪期望轨迹,可实现对其运动轨迹的精确控制。
[1]Arimoto S,Kawamura S,Miyazaki F.Bettering Operation of Robots by Learning [J].Journal of Robotic Systems,1984,1(2):123-140.
[2]Wang H B,Wang Y.Open-closed Loop ILC Corrected with Angle Relationship of Output Vectors for Tracking Control of Manipulator [J].Acta Automatica Sinica,2010,36 (12):1758-1765.
[3]李世平,孙明轩,朱胜.初态学习下非仿射非线性系统的迭代学习控制[J].浙江工业大学学报,2010,9(3):268-272.
[4]张航,罗大庸,黄浩江,等.机器人模糊迭代学习控制及其仿真研究[J].自动化技术与应用,2002(2):3-5,32.
[5]詹炜.迭代学习控制的指数变增益加速学习算法及其在机器人控制上的应用[J].微计算机应用,2007,28(7):678-681.
[6]阎世梁,张华,王银铃,等.极坐标下基于迭代学习的移动机器人轨迹跟踪控制 [J]. 计算机应用,2010,30 (8):2017-2020.
[7]林辉,王林.迭代学习控制理论[M].西安:西北工业大学出版社,1998.
[8]谢胜利,田森平,谢振东.迭代学习控制的理论与应用[M].北京:科学出版社,2005.
猜你喜欢
有色金属(矿山部分)(2021年4期)2021-08-30
新世纪智能(高一语文)(2021年3期)2021-07-16
民用飞机设计与研究(2019年4期)2019-05-21
电子测试(2018年1期)2018-04-18
电子制作(2017年24期)2017-02-02
合成化学(2015年4期)2016-01-17
海军航空大学学报(2015年1期)2015-11-11
法大研究生(2015年2期)2015-02-27
金属矿山(2014年7期)2014-03-20
华北水利水电大学学报(自然科学版)(2014年1期)2014-02-27
