
仿人智能PID控制在无塔恒压供水中的应用
2015-04-19 02:10柳栋梁汪玉凤
机械制造 2015年11期
□ 柳栋梁 □ 汪玉凤
兰州理工大学机电工程学院 兰州 730050
目前的供水方式大都向着高效节能、自动可靠的方向发展[1]。然而,传统供水系统(如恒速泵加压供水、高位水塔供水等),在用水高峰期,水的供给量常常低于需求量,出现水压降低、供不应求的现象;反之,则出现水压升高,造成能量的浪费,同时有可能导致水管爆裂或用水设备损坏[1]。因此,供水系统的出水恒定和经济效益是用户最关心的两个指标。
随着工程系统的日益复杂化和对控制要求的精确化,常规使用的PID控制器在面对非线性、大时滞性、难以精确建模的供水系统时,往往不能取得理想的控制效果。仿人智能控制(HSIC)是以专家及操作者积累的经验和知识进行推理描述的一种控制算法,这种算法模拟人的控制行为,对被控对象的先验知识要求不高,具有较强的鲁棒性和抗干扰能力[2]。基于此,笔者将仿人智能控制方法和传统PID控制方法结合起来,吸取各自的优点,形成仿人智能PID控制方法,应用于控制无塔恒压供水系统。
1 无塔恒压供水系统模型
无塔供水系统,顾名思义就是不建造水塔,不设置水箱,占地少,安装方便,该系统充分利用自来水管网的原有压力,串联在市政管网上直接将水输送至用户,并能根据用户用水量的变化调节变频器,进而调节水泵运转,使水泵始终工作在高效区,不仅节电效果明显,而且避免了水质的二次污染[1]。因此,它在高层建筑、居民小区、工矿企业中得到了广泛应用。
如图1所示,无塔供水系统直接串联在市政管网上,自来水流经稳压罐、水泵等过流部件送达用户,压力传感器可测管网压力,当用水量小、压力足够时,系统可利用市政管网的原有压力直接给用户供水,当用水量大、压力不足时,才启动加压泵,并在气压罐的共同作用下给用户供水 (气压罐充入惰性气体,压力大时,水被压入气压罐,这样能储存一部分能量,当水压降低时补给,可使加压泵工作于高效区间,达到节能降耗的目的)。
2 仿人智能PID控制
2.1 原理
仿人智能PID控制的基本思想是采用分层控制机制,在上层通过特征辨识判别当前的工作状态,模拟操作者的控制行为;在底层采用常规PID控制方法,辨识工作状态并配置相应的PID参数,实现多模态控制或决策。这种控制算法既反映出PID控制的特点,又反映了人工操作的适应性,有其可行性[3]。算法采用产生式规则对专家经验进行描述,规则表示为:

这种基于规则的if-then模型直观地描述了人的直觉推理逻辑和各种定性的模糊信息,迅速准确。
2.2 参数配置
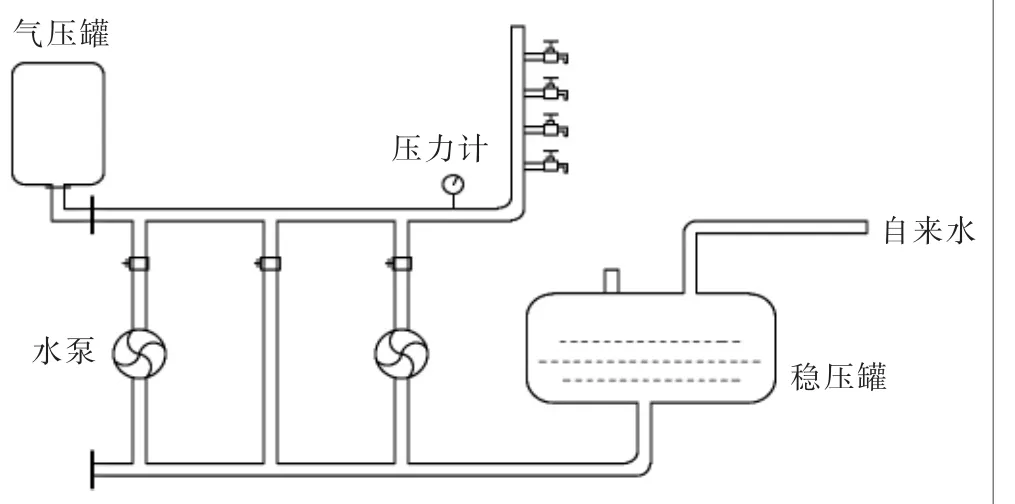
▲图1 无塔供水系统结构图
在配置相应的 P、I、D(KP、KI、KD)参数时,比例控制参数KP是基于偏差e调节的,当|e|较大时,比例控制参数KP的作用应加大并保持住,而在|e|减小到零的过程中,应减小KP作用,这样既能缩短调节时间,又能防止调节过度。积分控制参数KI是依据“误差是否存在”调节的,它对误差信息是不加选择的记忆,作用是消除静差,对其要有选择地运用。微分控制参数KD是根据偏差变化趋势调节的,它可预测误差变化的趋势有效减小超调,但微分控制参数KD只在误差较小时使用,当误差较大时,KD作用很大,可能会抵消KP作用,导致系统失稳[4]。
2.3 控制方法
算法选用误差 e(k)和误差变化率Δe(k)作为控制器的输入变量,描述系统的动态特征,表征其所处的工作状态。控制器的输出Δu(k)可以表示为:

数字PID控制器采用增量式PID控制算法,控制器的输出Δu(k)可以表示为:

式中:KP、KI、KD分别为相应配置的 P、I、D 参数;e(k)=sp-y(k),Δe(k)=e(k)-e(k-1)(sp为压力设定值,y(k)为系统压力输出值)。
结合图2给出系统动态响应说明控制原理,图中e2、e1、d均为误差,根据误差大小来划分响应区间,具体控制规则如下。
(1)if|e|≥e2,说明系统误差过大。此时不论误差变化趋势如何,控制器的输出都应按最大或最小输出,使误差绝对值以最大速度减小,相当于开环控制[3]。
(2) if e1≤|e|<e2,and e(k)×Δe(k)≥0(如图2中ab、cd和ef段),系统误差较大,系统输出正偏离设定值,即误差向着绝对值增大的方向变化,此时可实施较强的控制作用,以迅速扭转误差绝对值的变化趋势,并加入积分作用,去掉微分作用。 else,e(k)×Δe(k)<0(如图2中bc、de和fg段)时,说明系统误差较大,系统输出正偏向设定值,即误差向着绝对值减小的方向变化。此时可实施较弱的控制作用,让系统在惯性作用下回到稳态,这样既可以减小系统超调,又不影响系统的响应速度。
(3) if d≤|e|<e1,and e(k)×Δe(k)≥0,系统误差较小,误差偏离设定值,实施较强的控制作用,此时可加入积分,以减小稳态误差,加入微分作用,以较少超调;else,e(k)×Δe(k)<0,可实施较弱的控制作用,并加入微分作用。
(4) if|e|<d,系统误差很小,不动作,这样可减少电机、水泵的启动次数,降低磨损,增加寿命[5]。
控制器参数配置见表1。

表1 控制规则表
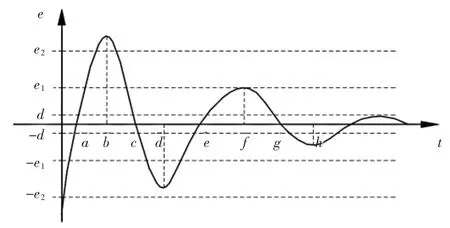
▲图2 误差变化趋势
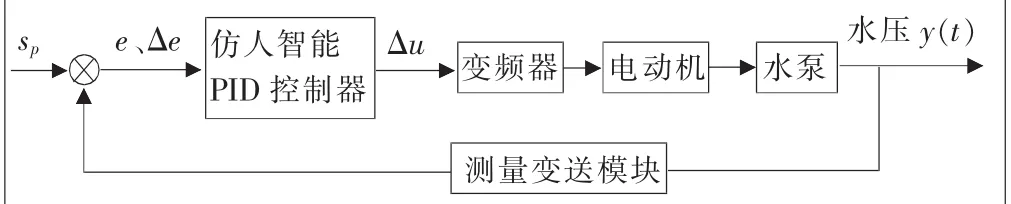
▲图3 控制系统结构图
2.4 仿人智能PID在无塔供水系统中的应用
系统控制结构如图3所示,主控制器采用PLC控制,压力信号经放大变换处理后变成标准0~5V电压值,后经A/D转换模块变成PLC可识别的数字信号,PLC按表1控制规则运算处理后,根据偏差大小输出高低电平驱动变频器来改变电动机的转速,最终实现对水压的控制[6]。其中,变频器对水泵机组的控制,俗称‘一拖多’,当用水量不足时,先由一台水泵在变频控制下供水,当用水量继续增大时,将其切换为工频工作,然后投入另一台泵变频运行,以此类推。
将该控制算法应用于高楼无塔供水系统中,系统变化更加平稳,既降低了系统能耗,又克服了气压波动大、水泵启动频繁等不足之处,加之无塔供水系统本身利用管网原有压力的优势,节能达40%~60%,真正实现了节能降耗的目的,给企业和居民带来了显著的经济效益。
3 仿真实验
如前文所述,由于无塔恒压供水系统的控制对象是一个时变的、非线性的、滞后的对象,很难得出它的精确数学模型,因此只能进行近似等效。首先是市政管网在恒定压力下将水送到供水系统中,这个阶段供水系统压力基本保持初始压力,这是一个纯滞后的过程,其次是当压力不足时启动水泵运行,水泵将水充满整个供水系统,压力随之逐渐增加,直到稳定,这是一个大时间常数的惯性过程。在此过程中,系统中其它控制和检测环节,如压力检测、继电控制转换、变频环节等的时间常数和滞后时间与供水系统的时间常数和滞后时间相比,均可忽略不计。因此,无塔恒压供水系统的数学模型可近似成一个带纯滞后的一阶惯性环节,经拉式变换,传递函数即可以写成[8]:

式中:K为系统的总增益;T为系统的惯性时间常数;τ为系统滞后时间。
通过系统辨识[8],取 K=2,T=5,τ=4 s,采样周期 t=0.01 s。用MATLAB对仿人智能PID和常规PID控制进行仿真比较[8],如图4所示,图中data1为仿人智能PID控制下的仿真结果,data2为传统PID控制下的仿真结果。
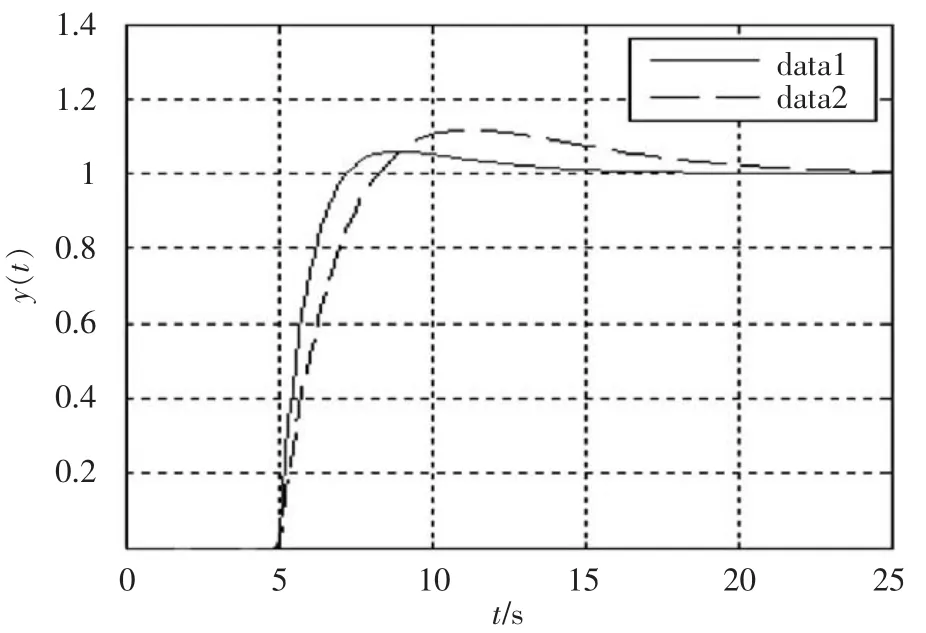
▲图4 单位阶跃下仿人智能PID与PID的比较曲线
仿真结果表明,仿人智能PID控制比传统PID控制调节时间更短,具有较小的超调量,更强的鲁棒性。
4 结束语
建立了无塔恒压供水系统模型,研究了仿人智能PID控制算法,以及它在无塔恒压供水系统中的应用,实践证明,仿人智能PID算法不仅对供水系统取得了良好的控制效果,而且该系统具有显著的节能降耗作用。同样,该算法对非线性、大时滞、模型未知或难以建模的复杂对象有适应性[9]。
[1]郝欣,牟长信,伍绍斌.基于规则的智能控制在凝结水泵变频节能优化控制中的应用研究 [J].东北电力技术,2008(10):12-15.
[2]罗忠,柳洪义,王菲,等.基于规则的仿人智能控制方法及其应用[J].控制工程,2009,16 (1):83-87.
[3]王忠峰,汤伟,刘庆利,等.仿人智能PID在APMP盘磨控制中的设计与应用[J].化工自动化及仪表, 2010,37(12):11-14.
[4]何术利,洪厚胜.仿人智能PID控制器的设计与应用[J].工业仪表与自动化装置,2007(6):31-33.
[5]梁立超,蒋启龙,王麦海,等.磁轴承轴向控制系统的仿人智能 PID 控制[J].机械工程与自动化,2007(3):116-118.
[6]廖常初.S7-300/400 PLC应用技术[M].北京:机械工业出版社,2012.
[7]李健,王冬青,王丽美.模糊PID控制器设计及MATLAB仿真[J].工业控制计算机,2011,24(5):56-57.
[8]丁周伟.泵站恒压供水系统的设计与实现[D].哈尔滨:哈尔滨工业大学,2006.
[9]周彦,何小阳,王冬丽.时变大滞后过程的专家模糊控制设计与仿真[J].系统仿真学报,2006,18(10):2786-2789.
猜你喜欢
装备制造技术(2021年2期)2021-07-21
传感器与微系统(2018年7期)2018-08-29
制造技术与机床(2017年6期)2018-01-19
现代制造技术与装备(2016年12期)2016-04-06
通信电源技术(2016年5期)2016-03-22
智能系统学报(2015年4期)2015-12-27
电源技术(2015年9期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01
河南科技(2014年11期)2014-02-27
河南科技(2014年3期)2014-02-27
