
三自由度平面驱动冗余并联机器人刚度性能与尺寸关系研究
2015-04-26 08:24王冰周志权聂旭萌
机床与液压 2015年3期
王冰,周志权,聂旭萌
(1.北华航天工业学院机械工程系,河北廊坊 065000;2.烟台龙源电力技术股份有限公司,山东烟台 264006)
0 前言
并联机构如经过合理的设计,一般具有刚度大、承载能力强等优点,因此,近20年来,其在机器人、模拟器、数控机床及柔性机构等领域得到越来越广泛的应用。但是,并联机构的缺点之一,就是其工作空间小,且工作空间内部存在很多奇异,奇异的存在,使得本已很小的工作空间变得更小。而采用驱动冗余可以克服工作空间内的奇异,且可进一步提高并联机器人的承载能力和刚度,因此,驱动冗余并联机器人吸引了很多学者的关注,例如,文献[1-2]等对平面二自由度驱动冗余并联机器人的机构性能与尺寸关系进行了研究,文献[3]探讨了其综合性能优化设计问题。但是,对三自由度平面驱动冗余并联机器人的研究却开展得很少。
并联机器人机构运动学尺寸的合理设计一直是一个难点和热点问题,主要是由于机器人机构运动学尺寸是多维且无穷的变量,而如何有效地建立机构性能与机构尺寸之间的关系,则是其合理设计的前提。高峰和刘辛军[4]提出了空间模型理论,并将并联机器人机构的性能指标以数值的形式体现在空间模型内,即性能图谱。为并联机器人机构尺寸的合理设计提供了一种非常有效的方法。
机构的刚度是机器人十分重要的一个性能,其体现了机器人机构在外力作用下,抗变形能力的大小。这里将应用空间模型理论对平面三自由度驱动冗余并联机器人的刚度性能和机构尺寸关系进行探讨,并绘制其刚度性能图谱,这些工作将为该机器人机构的优化设计提供有益的参考。
1 空间模型
三自由度平面驱动冗余并联机器人的机构简图如图1所示。其为对称结构,机器人的固定平台为正方形A1A2A3A4,机器人的运动平台为正方形C1C2C3C4,设连杆AiBi长为L1,连杆BiCi长为L2,运动平台尺寸CiP为L3,Ai到正方形A1A2A3A4中点的尺寸为L4,这里i=1—4。
为了合理地设计该机器人机构,将机器人的运动学尺寸量纲一化,令

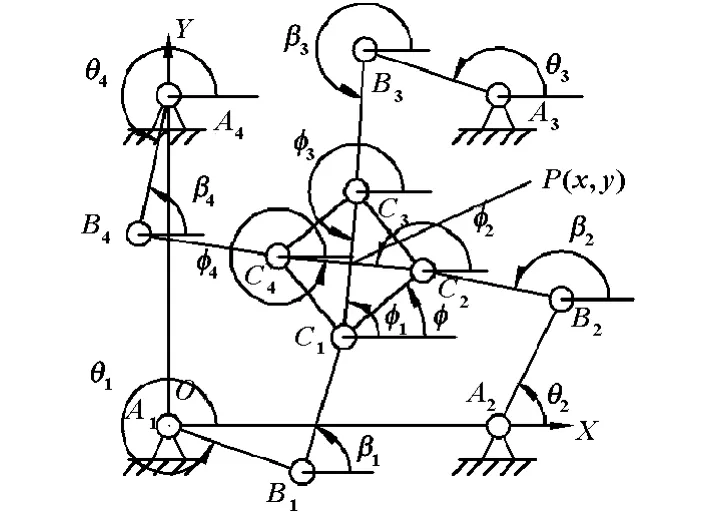
图1 平面三自由度驱动冗余并联机器人机构

其中li为对应于实际运动学尺寸Li的相对尺寸,为无量纲参数。由式(1)和式(2)可得

为了保证机器人能够正确的安装,其相对尺寸应满足如下条件:

由式(3)和式(4)可得该机器人的空间模型为如图2(a)所示的六面体ABCDEFG,所有具有相对尺寸的三自由度平面驱动冗余并联机器人机构都在这个六面体内。由式(3)可得

为了方便空间模型的应用,如令l4在[0,2]之间变化,则可得到空间模型的一系列截面图,这些截面图称为其空间模型的平面图,它以l1、l2和l3为坐标,其中只有两个是独立参数。如令l4=1.5,空间模型的平面图如图2(b)所示。空间模型平面图内每一点(如图中点a)都唯一对应一组具有相对尺寸的机器人机构运动学尺寸参数,因此这种一一对应关系使在空间模型内探讨机器人机构运动学尺寸参数和机构性能之间的关系成为可能。如将机器人机构性能评价指标以数值的形式呈现在空间模型平面图内将可得到机构的性能图谱。

图2 平面三自由度驱动冗余并联机器人机构的空间模型
2 刚度性能评价指标
2.1 速度雅可比矩阵
如图1所示,建立机器人的固定坐标系XOY,坐标原点O与A1重合,机器人末端运动平台的位置P(x,y)和姿态φ为机器人的输出,与固定平台相连的4个连杆的角位移θi为机器人的输入,该机器人的速度方程为[5]:

式中:
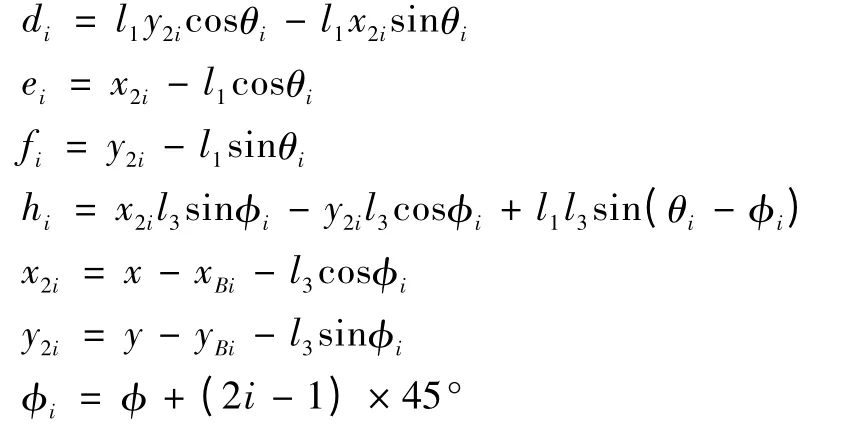
(xBi,yBi)为点Ai在参考坐标系下的坐标。也可将机器人的速度方程写成下面的矩阵形式

其中,矩阵G为机器人的逆速度雅可比矩阵,其为一4×3阶矩阵,其广义逆矩阵J即为该机器人的速度雅可比矩阵。
2.2 柔度矩阵和刚度性能评价指标
为全面且系统地评价机器人机构在整个可达工作空间内的刚度性能,采用全域刚度性能评价指标来度量三自由度平面驱动冗余并联机器人机构的刚度性能。这里,定义柔度矩阵和全域刚度性能评价指标为[6]:
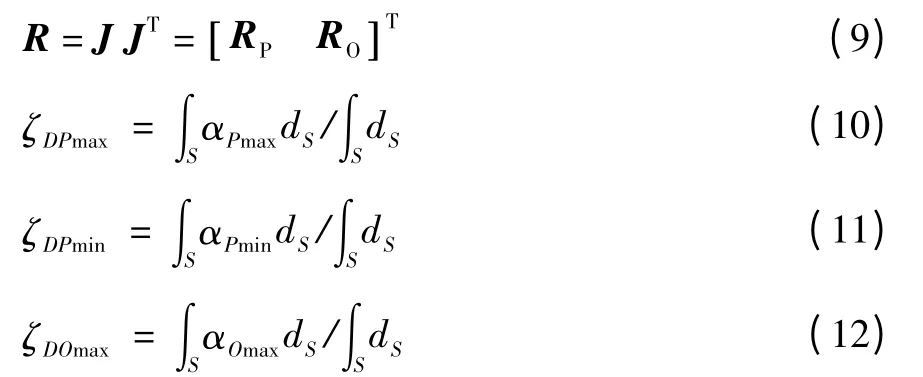
这里R为机器人机构的柔度矩阵,其中RP为对应位置变形的一2×3阶子矩阵,为位置变形柔度矩阵;RO为对应姿态变形的一1×3阶子矩阵,为姿态变形柔度矩阵。ζDPmax为全域位置最大变形、ζDPmin为全域位置最小变形、ζDOmax为全域姿态最大变形。αPmax和αPmin为位置变形柔度矩阵的最大和最小奇异值,αOmax为姿态变形柔度矩阵的最大奇异值,由于该机器人机构姿态变形柔度矩阵为一行向量,所以其只有最大奇异值,也就是只有最大姿态变形。S是该机器人的理论可达工作空间。显然ζDPmax,ζDPmin和ζDOmax的值越小,机器人机构的柔度越小,则机器人机构的刚度越大,机器人机构的刚度性能越好。
3 刚度性能图谱
由式(10)—(12),在空间模型内分别计算这3个刚度性能评价指标值,并绘制性能图谱如图3—5所示,其中图3为位置变形极大值性能图谱,图4为位置变形极小值性能图谱,图5为姿态变形极大值性能图谱。

图3 位置变形极大值性能图谱

图4 位置变形极小值性能图谱

图5 姿态变形极大值性能图谱
4 结论
得到了三自由度平面驱动冗余并联机器人机构的刚度性能图谱,从图3—5可见:
当l2一定时,位置变形极小值和姿态变形极大值指标与l1成正比,即l1越小,变形越小,则刚度性能越好。
位置极大值指标与l3成正比,即l3越小,变形越小,则刚度性能越好。
对一种三自由度平面驱动冗余并联机器人刚度性能与机构尺寸关系进行了研究,并绘制了该机器人机构的刚度性能图谱,这些图谱对于该机器人机构的分析与设计具有一定的参考价值。
[1]张立杰,刘辛军.平面2自由度驱动冗余并联机器人的机构设计[J].机械工程学报,2002,38(12):49-53.
[2]张立杰,刘颖,黄真,等.平面2自由度驱动冗余并联机器人的性能分析[J].机械工程学报,2006,42(7):181-185.
[3]刘欣,仇原鹰,盛英,等.平面冗余并联机器人的综合性能优化设计[J].西南交通大学学报,2008,43(5):626-632.
[4]GAOFeng,LIUXinjun,GRUVERL William A.Perfor-Mance E-valuation of Two-degree-of-freedom Planar Parallelrobots[J].Mech.and Mach.Theory,1998,33(6):661-668.
[5]WANG Bing,WEI Zhihui.Analysis on Velocity Performance of Planar 3-DOF Parallel Manipulator with Actuation Redundancy[J].In:The 3rdInterna-tional Conference on Manufatturing Science and Engineering,Xiamen,2012:2327-2332.
[6]刘辛军.并联机器人机构尺寸与性能关系分析及其设计理论研究[D].秦皇岛:燕山大学,1999.
猜你喜欢
China’s foreign Trade(2021年6期)2021-12-26
中学生数理化·中考版(2021年10期)2021-11-22
少先队活动(2020年12期)2021-01-14
汽车与新动力(2017年3期)2017-06-29
中成药(2017年3期)2017-05-17
中国环境监察(2016年7期)2016-10-23
领导科学论坛(2016年9期)2016-06-05
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
中华奇石(2015年5期)2015-07-09
