
管道槽口检测平台定位误差分析
2015-04-26 08:24孟祥宇赵言正付庄
机床与液压 2015年3期
孟祥宇,赵言正,付庄
(上海交通大学机械系统与振动国家重点实验室,上海 200240)
0 前言
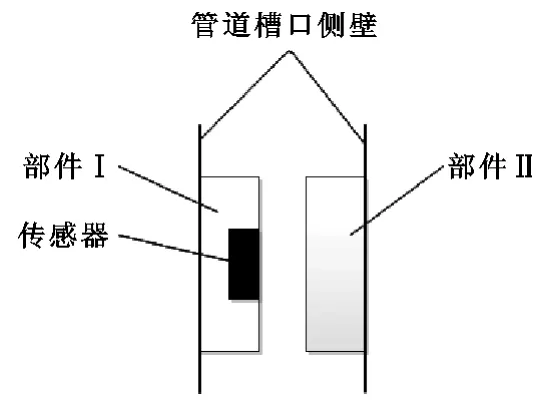
图1 互为基准测量原理图
有些长距离、封闭式管道内部充满油垢,当对管道槽口进行检测时一些传感器探头直接暴露在外部会被油污腐蚀,降低传感器的使用寿命,甚至导致传感器无法正常工作。文中设计一种检测方式,使精密的传感器探头置于检测装置的内侧,让检测装置外部零件与管道槽口侧壁接触。图1是测量原理简图,检测装置的部件I和部件II分别与槽口两侧壁接触,传感器和其中一个部件固定,检测两个测量部件之间的距离,这个检测的位移量与两部件厚度之和即为槽口的宽度。这种测量方式不是以某一个平面作为测量的基准,而是采用槽口两侧壁互为基准进行槽口宽度测量。
管道槽口检测系统平台上面安装有检测装置,其结构如图2所示,其中上沿导向轮和履带之间依靠弹簧力夹紧管道槽口上沿和管道内圆表面,检测装置左右锥销依靠弹簧力压紧在管道槽口两侧壁,并且通过轴承座实现转动以适应平台沿管道圆周的姿态偏转。

图2 检测装置安放
1 定位基准误差对检测的影响
检测平台位于管道工作时,由于姿态的偏移、定位基准面尺寸误差以及履带的压缩等原因都会产生一定的机械误差。以下分别单独对平台行走方向姿态偏移、管道圆周姿态偏转、管道侧棱高度差以及履带压缩产生的检测偏差进行分析。
1.1 行走方向姿态偏移产生的误差
检测平台沿管道槽口方向的偏移主要是由于前后导向轮与槽口之间有一定的间隙,导致了管道槽口检测平台行走的方向与槽口方向出现了不平行的现象,其结构示意图如图3所示。

图3 行走姿态偏移产生的误差
由图中简单的几何关系有:

式中:δ是检测平台行走方向与槽口方向的偏移角度;Rth是左右锥销圆弧外表面半径;Rgwheel是前后导向轮半径;Lgwheel是前后导向轮间距;Lins1是槽口检测宽度;Lr1是槽口实际宽度。综合以上两式可以得出检测误差Ldev1的表达式:

经过公式(4)结果可以看出,Lgwheel和Rgwheel(始终小于Lr1)越小,Ldev1越小,在结构允许的情况下可以通过增加前后导向轮间距减小检测误差。同时当2Rth=Lr1时,误差为零,综合管道槽口实际宽度的公差,适当选取Rth可以减小检测误差。
1.2 管道圆周方向姿态偏转产生的误差
履带采用圆弧形特种履带,检测平台在工作时会发生沿管道内圆周向偏转的情况。检测装置底有一个转动的自由度,左右锥销在弹簧力作用下贴紧槽口壁面,在理想状况下(槽口侧壁平行),这种误差被完全消除掉的。实际上,由于槽口加工的原因,管道槽口两侧壁呈V型夹角,检测平台行走稳定后,一侧锥销会贴紧槽口壁面,另外一侧的锥销不能与管道槽口侧壁贴紧,如图4所示。根据测量需求,指定沿槽口侧棱向上Horient的位置宽度作为测量点,根据几何推导有以下公式:

式中:Lr2是测量基准值;Lins2是检测值;a是槽口侧棱到检测锥销下表面的距离;λ是槽口侧壁夹角;s是槽口两侧棱间距。综合以上两式可以得出检测误差Ldev2的表达式:

当槽口夹角λ一定时,测量点越高,即Horient越大,Lr2越大。当Lr2>Lins2时,a越大,检测误差Ldev2越小;当Lr2<Lins2时,a越小,检测误差Ldev2越小。故可以根据测量点的高度Horient适当调整a的值来减小由于周向姿态偏转导致的误差。

图4 管道圆周方向姿态偏转导致的误差
1.3 侧棱高度差和履带变形导致的误差
由于机械加工变形,槽口侧棱存在一定的高度差,高度差影响检测装置在高度方向的位置,也就是图4中a值会发生一定的变化。此时极限情况是a值减小量刚好等于侧棱的高度差,图5给出这种极限情况的示意图。

图5 侧棱高度差引起的定位误差
类似地,履带受到压力产生压缩变形,或设备使用一段时间之后履带发生磨损,这些因素都会影响检测装置在高度上的变化,也就是a值得变化。
根据式(6)可以推导出以下宽度检测值公式:

式中:ΔHorient是侧棱的高度差;ΔHcompress是履带的压缩量。可以根据下式计算履带的压缩量ΔHcompress:

式中:F0是上沿滚轮和履带间的夹紧力;Erubber是橡胶的弹性模量;Acontact是履带与管道内壁的接触面积。
2 总结
综合以上结果分析,减小或者消除平台行走方向姿态偏移、管道圆周姿态偏转、侧棱高度差以及履带压缩磨损产生的定位基准误差,可以通过增大前后导向轮的间距Lgwheel和前后导向轮半径Rgwheel,根据槽口具体情况适当选取锥销外圆半径Rth,并适当调节检测锥销距离槽口侧棱的距离a。
[1]KAYA Necmettin.Machining Fixture Locating and Clamping Position Optimization Using Genetic Algorithms[J].Computers in Industry,2006,57(2):112-120.
[2]李晋,李文星.工件以平面定位时基准的精度分析[J].机床与液压,2005(1):43-44.
[3]徐小龙,王晓慧,张文芳,等.基于尺寸式原理的定位误差分析算法[J].机械制造,2013(1):38-40.
[4]邹哲维,万会雄.工件的定位误差分析及计算方法[J].长江工程职业技术学院学报,2011(2):70-72.
[5]史庆国.浅谈基准及其选择[J].中国轻工教育,2000(3):41-42.
[6]周宏甫.机械制造技术基础[M].哈尔滨:哈尔滨工业大学出版社,2009.
猜你喜欢
河南水利与南水北调(2021年4期)2021-07-05
中国石油石化(2021年8期)2021-03-30
福州大学学报(自然科学版)(2020年6期)2020-12-25
学生天地(2020年3期)2020-08-25
石油化工建设(2019年6期)2020-01-16
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
石油化工建设(2017年2期)2017-06-05
电机与控制应用(2015年7期)2015-03-01
橡胶工业(2015年4期)2015-02-23
