
基于ADAMS和AMESim机液联合仿真的电动轮矿用车转向机构动力学研究
2015-04-26 08:24姜立标程铖何华刘坚雄
机床与液压 2015年3期
姜立标,程铖,何华,刘坚雄
(华南理工大学机械与汽车工程学院,广东广州 510640)
0 前言
220 t电动轮矿用自卸车转向系统是全液压控制系统,包含机械和液压两大部分。目前针对转向机构的研究多数只是从机械动力学、运动学或者液压建模等方面进行独立仿真,比较缺乏在机液联合仿真方面的研究。文中利用ADAMS软件进行转向系统动力学仿真,建立四轮二自由度动力学模型分析220 t电动轮矿用自卸车的稳态转向特性;应用AMESim软件建立液压控制系统模型,分析转向油缸、横拉杆的受力状况。运用两者的软件接口技术建立针对220 t电动轮矿用自卸车转向系统的机液联合仿真模型,实现液压控制和机械动力学仿真的联合研究。
1 矿用车转向系统机液联合建模
1.1 220 t矿卡全液压转向系统装配模型
作者采用CATIA建立转向系统各部件的三维模型,包括转向节、横拉杆和转向油缸,在ADAMS/Car模块中装配,其装配模型如图1所示。
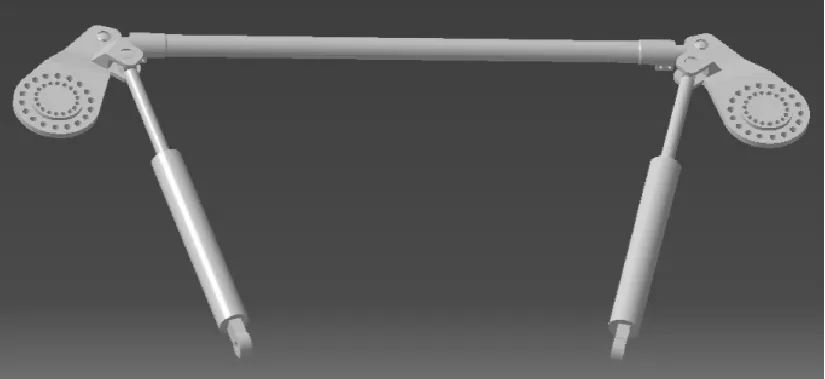
图1 220 t矿卡全液压转向系统装配模型
1.2 220 t电动轮矿用自卸车装配建模
在ADAMS/Car模块中建立轮胎UA模型、前悬架-转向系统模板、后悬架系统模板以及车身总成系统模板,并装配成整车,如图2所示。

图2 220 t电动轮矿用自卸车装配模型

图3 220 t矿卡全液压转向系统动态模型
1.3 220 t矿卡全液压转向系统动态建模
转向系统的组成部分除了流量放大器和全液压转向器外,还有转向泵、管路、油液、转向机构、油箱、单向阀、阻尼孔等液压元件,直接调用AMESim软件标准库中相应的液压元件,并进行组装、设置参数,得到如图3所示的220 t电动轮矿用自卸车全液压转向系统的动态仿真模型。
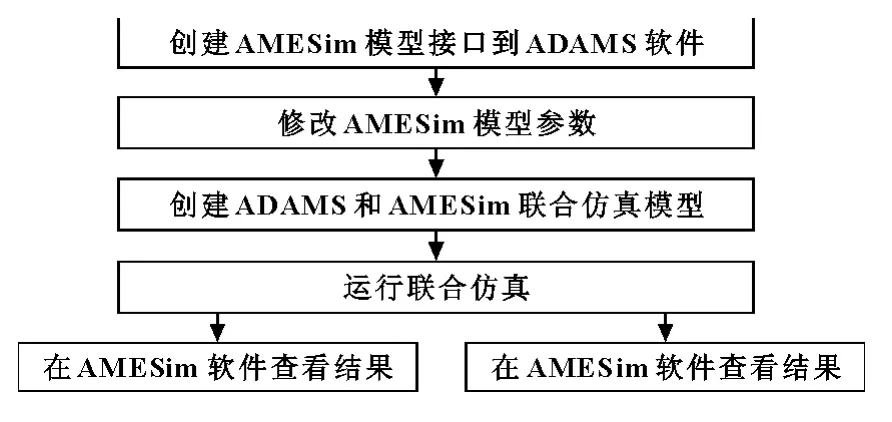
图4 220 t矿卡全液压转向系统动态模型
1.4 220 t矿卡全液压转向系统机液联合建模
将ADAMS机械模型和AMESim液压控制模型通过接口技术进行无缝整合,实现220 t电动轮矿用自卸车转向系统的机械动力学模型与液压系统模型的联合数据交换,实现数据同步交流。联合仿真的过程可以用图4表示。其中,AMESim软件输出转向油缸的力作为ADAMS软件的输入,ADAMS软件输出转向油缸的速度和位移作为AMESim软件的输入。
2 四轮车辆二自由度转向模型
转向分析中,着重研究整车横摆运动以及侧向运动,针对220 t电动轮矿用自卸车的真实情况建立四轮二自由度的转向模型,如图5所示。
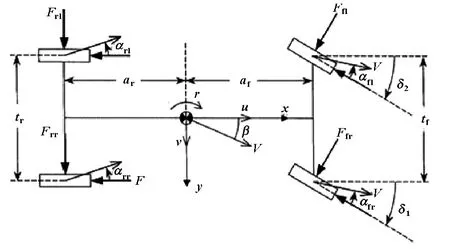
图5 四轮车辆二自由度转向模型
根据文献[1-4],忽略悬架的影响并且将转向中影响较小的后轴做相应简化。该模型与传统的二自由度“自行车模型”相比,改善了后者忽略同轴车轮具有不同侧偏角的缺陷。速度较低且转向角很小时,同轴车轮的侧偏角可以近似相等,但是在实际转向分析中内、外转向轮的转角是有差异的,内轮转角要比外轮转角大;在中高速情况下,前轴左右轮胎的侧偏角也不同,两者的差角随车速增大而增大[5]。
β为质心侧偏角:

质心绝对加速度在y轴的分量为:

得到系统运动方程:
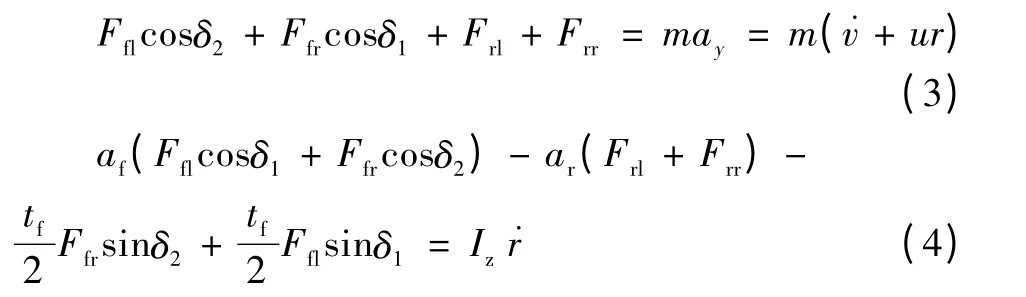
式中:r为质心的横摆角速度;af、ar分别为前、后轴到整车质心的距离;F为轮胎侧向力,tf、tr分别为前、后轮距;m、Ⅰz为整车质量以及整车转动惯量。
将(3)和(4)改写成方程如下:

[6],单个轮胎侧偏角的计算公式如下:
根据已知的轮胎侧偏刚度与侧偏角的大小,得到前后轮胎侧向力分别为:

3 220 t矿用自卸车稳态转向分析
220 t电动轮矿用自卸车具有非常规车辆的自身质量和规定载重,并且实际的工作环境极其恶劣,是搓板路、石子路等多种复杂路面的混合环境,对车辆的转向稳态特性要求较高。
3.1 车速和转角阶跃综合影响
转角阶跃的主要影响因素包括:载重、车速和转向角。文中将220 t电动轮矿用自卸车的行驶工况设定为满载,主要分析车速和转向角两者对整车质心横摆角速度的综合影响。将最大转角阶跃分为3组:5°、15°和30°,车速为0~18 m/s匀加速。

图6 220 t电动轮矿用自卸车横摆角速度随车速关系
从图6中可以看出,最大转角阶跃分别为5°、15°和30°的3组曲线在车速0~18 m/s范围内均可快速达到稳定状态。3条曲线的横摆角速度达到稳态值所对应的车速分别为3 m/s、3.6 m/s和3.8 m/s,而整车质心横摆角速度稳态值分别为0.21 rad/s、0.68 rad/s和1.32 rad/s。由此可得出以下结论:最大转角阶跃越大,整车质心横摆角速度达到稳态值所用的时间越长;最大转角阶跃越大,系统达到稳定状态所对应的横摆角速度峰值也越大。
3.2 220 t矿卡不足转向特性分析
利用1.3节中建立的220 t电动轮矿用自卸车装配模型在ADAMS软件中研究其转向特性。如图7所示,车辆转向行驶轨迹为逆时针发散圆,其中设定车速为10 m/s,转向角阶跃为10°,理论稳态转向半径为40 m。ADAMS软件中得到的实际稳态转向半径与理论转向半径比值如图8所示,经过短暂的过渡状态之后比值稳定在1.56。
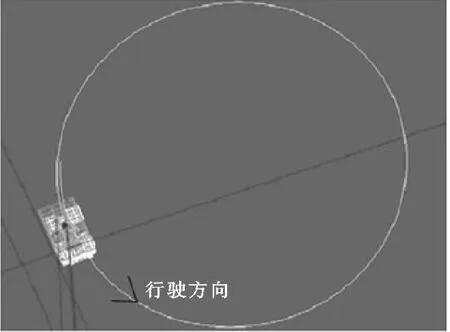
图7 220 t电动轮矿用自卸车稳态转向行驶轨迹

图8 实际转弯半径与理论转弯半径比值
220 t电动轮矿用自卸车的稳态转向行驶轨迹、实际与理论转向半径比值大于1均可以说明车辆具有不足转向特性。横摆角速度可以快速地达到稳态值,有较好的操纵稳定性。
4 转向油缸及横拉杆受力分析
4.1 全液压转向系统转向油缸受力分析
为了获取转向油缸的压力曲线,利用AMESim软件对220 t电动轮矿用自卸车全液压转向系统施加方向盘转角位移阶跃和转向盘转速阶跃并进行仿真计算。在ADAMS软件中测得整车原地转向工况下,左右转向油缸的受力情况如图9所示,左缸以及右缸的最大受力分别为521 539 N和521 513 N,这一结果与转向油缸设计最大推力521 540 N相近。

图9 220 t电动轮矿用自卸车原地转向时左右油缸推力
4.2 原地转向横拉杆受力分析
220 t电动轮矿用自卸车原地转向横拉杆受力分析包括两种工况:空载和满载。由图10可看出,满载和空载两种状态下转向横拉杆随转向角变化的趋势基本相同,只是前者横拉杆的受力要增加100N左右,详见图10中放大图框,载荷增大导致转向横拉杆的受力增大与实际情况相符。
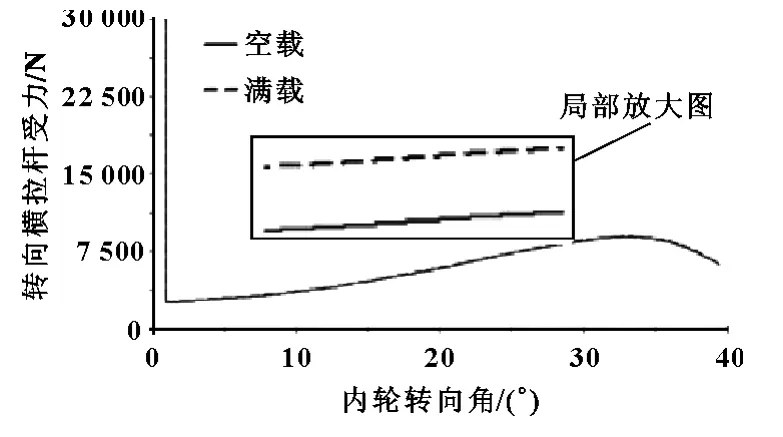
图10 220 t矿卡满载和空载原地转向横拉杆受力
整个转向过程中,横拉杆受力变化范围为2 588~8 915 N。初期发生受力突变、横拉杆受力产生冲击的原因有:转向球销有间隙;转向角阶跃使转向轮的转向速度产生突变等。横拉杆受力随着转向角的增大而增大,峰值受力发生在内轮转角为32°时,之后横拉杆受力开始减小。说明内轮转向角是32°时转向横拉杆的转向力臂达到最小、受力达到最大。
4.3 满载行驶转向横拉杆受力分析
220 t电动轮矿用自卸车满载转向行驶工况时。转向横拉杆的受力出现较大波动的情况,如图11所示。在内轮转向角0~40°的变化范围内,横拉杆由于受到地面的冲击导致受力波动较大,受力值比原地转向大得多,所以转向横拉杆受力最复杂最危险的工况是行驶转向,设计时必须考虑动态受力。

图11 220 t电动轮矿用自卸车满载行驶转向横拉杆受力
5 结论
在整车全液压转向系统机液联合模型的基础上,进行了动力学仿真。首先建立了更符合220 t电动轮矿用自卸车实际情况的四轮二自由度模型,分析了220 t电动轮矿用自卸车稳态转向:在转向阶跃角变大且车速增加的情况下,整车横摆角速度随转向角的增大达到稳定状态所对应的车速略有增加,符合实际行车状况;在ADAMS中220 t电动轮矿用自卸车稳态转向行驶轨迹呈现不足转向特性,这与实际转向半径和理论转向半径比值大于1的仿真结果相吻合。仿真结果验证了所研发样车具有不足转向特性,操纵稳定性较好。利用联合仿真模型进行220 t电动轮矿用自卸车全液压转向系统的原地转向仿真,转向油缸受力和实际参数基本吻合,全液压转向系统的设计满足了整车转向时转向油缸的最大推力限制;最后分析了转向横拉杆在3种不同工况下的受力情况,满载与空载时的转向横拉杆受力差值在100 N左右,基本消除了由于载荷变化时转向横拉杆受力变化较大导致缩短横拉杆正常使用寿命的现象。综上所述,文中所设计的220 t电动轮矿用自卸车全液压转向系统符合实际要求,并为基于机液联合模型的转向系统设计提了一定的实践基础。
参考文献:
[1]GHAFFARI A,AHMADI J,KAZEMI R.Fuzzy Logic Based Vehicle Stability Enhancement Through Active Rear Steering[J].ASME Paper No.DETC2005-85350.
[2]DAI L,HAN Q.Stability and Hopf Bifurcations of a Nonlinear Model for a Four-Wheel-Steering Vehicle System[J].Commun.Nonlinear Sci.Numer.Simul,2004:331-341.
[3]LIU L,PAYREM G.Global Bifurcation Analysis of a Nonlinear Road Vehicle System[J].ASME J.Comput.Nonlinear Dyn,2007,2(4):308-315.
[4]SHEN S,WANG J,SHI P,et al.Nonlinear Dynamics and Stability Analysis of Vehicle Plane Motions[J].Veh.Syst.Dyn,2007,45(1):15-35.
[5]杨啟梁.四轮车辆二自由度转向模型研究[J].机械与电子,2007(8):71-73.
[6]NGUYEN V.Vehicle Handling,Stability,and Bifurcation Analysis for Nonliner Vehicle Models[D].MSthesis,University of Maryland,College Park,MD,2005.
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
西南石油大学学报(自然科学版)(2019年2期)2019-04-25
电子制作(2017年17期)2017-12-18
制造业自动化(2017年2期)2017-03-20
江西煤炭科技(2015年4期)2015-11-08
橡胶工业(2015年10期)2015-08-01
筑路机械与施工机械化(2015年11期)2015-07-01
专用汽车(2015年2期)2015-03-01
汽车维护与修理(2015年1期)2015-02-28
筑路机械与施工机械化(2014年7期)2014-03-01
