
大型活塞平面3D运动姿态检测系统研究
2015-05-11 07:13李红民牛晓光马玉真王磊李斌
山东建筑大学学报 2015年5期
李红民,牛晓光,马玉真,王磊,李斌
(1.山东建筑大学信息与电气工程学院,山东济南250101;2.济南大学机械工程学院,山东济南250022)
大型活塞平面3D运动姿态检测系统研究
李红民1,牛晓光1,马玉真2,王磊1,李斌1
(1.山东建筑大学信息与电气工程学院,山东济南250101;2.济南大学机械工程学院,山东济南250022)
煤气储气柜柜位(容)、活塞平面倾斜度、活塞平台运行速度等都是监控煤气柜运行状态的重要指标。常用检测方法只能对其中某项指标进行监测,不能全面描述活塞平台运动状态,因而局限性较大。文章构建了煤气柜活塞平台运动姿态检测系统,进行了运动姿态检测模型的构建及运动姿态分析,并在LabVIEW平台上进行系统软件的设计,通过对系统不确定度进行分析,证明3D运动姿态检测系统可以满足用户高精度检测的要求,能够实现对煤气储气柜活塞平台运动姿态的在线监测。
大型活塞平面;运动姿态;激光测距传感器;在线检测
0 引言
大型活塞平面在威金斯型煤气储气柜中有大量的应用。威金斯型储气柜的柜体为圆柱形,大型活塞平面与柜体之间由挠性橡胶密封膜可靠联接。气体进出柜时,通过大型活塞平面和T型挡板上升或下降来实现存储与输出,密封橡胶膜随之卷上或卷下。若发生柜位过高或过低、活塞平面倾斜倾斜程度过大及升降速度变化过快等情况,都可能引起安全事故的发生[1]。为了保证煤气柜运行的安全性,煤气柜柜位、活塞平面倾斜度、活塞运行速度的实时监测不可或缺。
常用的检测方法有使用水柱差压法、超声波物位计、光纤柜位仪、倾角传感器法和雷达柜位计[2-4]等。超声波物位计主要用于柜位的检测,缺点在于超声波测量探头实际最大测量范围受工况和环境影响较大,需经复杂计算后才能确定。检测活塞倾斜度一般采用水柱差压法,测量误差较大,连续运行时还需频繁维护。而光纤柜位仪检测方法,信号传输较为稳定,不足之处在于,除光纤传感器外,还需安装重锤、绞轮、钢丝绳等,构成较为复杂,且钢丝绳的形变可能影响测量精度[5]。总的来说,常用测量方法只能对煤气储气柜柜位(容)或活塞平面倾斜度进行单一测量,少有对两者同时测量的测量方法,因而局限性较大
文章在3 D建模的基础上提出了大型活塞平面运动姿态检测,是指通过建立活塞平面运动姿态变化模型来描述的煤气柜活塞实时姿态变化。具体来说,由最小二乘法拟合出一个连续变化的空间平面,以此代表实际活塞平面的运动变化状态,并根据此平面运动状态的变化情况来描述整个煤气柜的运行状态。
系统采用激光测距传感器具有以下优势:准直激光测距传感器采用超大量程(0~200 m)非接触式测量原理,适用于易燃、易爆场合,对大量程移动的活塞平面在线式连续测量,从而达到对煤气柜柜位、活塞平面倾斜度、活塞运行速度等状态参数进行综合连续监测[6]。
1 检测系统构建
将5只激光测距传感器固定于煤气柜顶的水平支架,A、B、C、D四点与O点之间距离相等。准直激光可垂直向下射在5个测量点上,在线连续测量获得的安装点至活塞平面的距离,通过R S 485总线将5组激光位移传感器的测量数据传输到中央监控室,经嵌入式数据采集卡导入工控机,通过软件将测量数据进行分析处理和3 D图像显示。
1.1 测量点的选取
参照平面度误差检测[7]中对角线布点的测量布点形式,并结合现场实际情况,在考虑到威金斯型柜具有特制橡胶模的活塞结构,构建本系统的活塞平台运动姿态模型并选取测量点时,可将活塞平台近似看做一个不透光的圆形平面,选取于柜顶部的结构支架上选取传感器安装点,在每一点安装一台激光测距传感器,使其出射光线与落底时活塞基准水平面垂直,即本系统的测量点为出射光线与活塞平台的交点[8]。理论上说,由于活塞平台非刚性且面积较大,为保证测量的准确性,选取的测量点应越多越好,结合现场情况并考虑成本等现实因素,最终在柜顶部的结构支架上选取5个传感器安装点,对应活塞平台上选取的5个测量点。
除根据平面度误差对角线布点的测量布点形式选取A、B、C、D四点外,另选取支架结构几何中心点作为第五点,即O点。如图1所示,其中O点为柜顶架构支架平面的几何中心,A、B、C、D四点与O点之间距离相等,且A C⊥B D。

图1 测量点的选取图
1.2 坐标系的建立
考虑到威金斯柜圆柱体的外形特征和活塞平台圆形的几何特点,建立时刻坐标系。对其描述如图2所示。

图2 运动姿态三维坐标系图
(1)由于激光测距传感器Laser5的安装位置在圆柱体上表面圆的圆心上,其出射光线平行是一条铅垂线,取激光射在实际活塞平面上的测量点为坐标系原点。
(2)以激光测距传感器Laser5的出射光线作为z轴,x轴与直线A C、y轴与直线B D所共平面,垂直于平面x 0 y。
(3)由实际运动情况可知,坐标系的z轴不随时间变化,x轴和y轴相对z轴水平方向不发生旋转,而垂直方向随时间变化,即x 0 y面在垂直方向上下运动。
设r为Laser1~Laser4距Laser5的水平距离,h1~h5表示Laser1~Laser5的实际测量值。依据已建立的坐标系,测量点的坐标可分别表示为A(xy,y1,z1),B(x2,y2,z2),C(x3,y3,z3),D(x4,y4,z4)和O(x5,y5,z5)。又根据系统建模形式,其中A、B、C、D四点可进一步表示为A(r,0,h5-h1),B(0,-r,h5-h2),C(r,0,h5-h3)和D(0,-r,h5-h4),坐标原点O(0,0,h5)。
2 运动姿态检测模型的构建及运动姿态分析
2.1 最小二乘平面的获取
获取活塞倾斜度是通过建立一个最佳匹配的理想参考平面,利用激光位移传感器测量获取的检测数据,构建并仿真得出动态的活塞平面,再通过与理想平面的对应比较与关联,即可得出活塞平面倾斜度测量值。采用选取对角线布点的测量布点形式,根据计算各测得点的坐标值,进而获得理想参考平面的方程。
设理想参考平面的方程z=a x+b y+c,其中系数a、b、c为参数估计量,即a、b、c应使得被测实际表面上全部观测值z与评定基准的回归值z′的偏差平方和达到最小[8],由式(1)表示为

对于通过试验给定的数据(xi,yvj,zij),S是a、b、c的非负二次式,所以最小值一定存在,a、b、c根据极限定理,应是式(2)方程的解为

可将方程(1)进一步化简为式(3)

联立公式(3)中的三个方程式,其中N=4,可得到a、b、c的值,继而得到最小二乘活塞平面的平面方程。
2.2 最小二乘平面倾斜度计算
根据得出的最小二乘平面方程z=a x+b y+c,可知最小二乘平面的法向量为n(a,b,-1)。可计算获得法向量与x、y、z坐标轴正向的夹角α、β、γ,各个方向角的计算式(4)为

将各方向角与其临界值相比较,可以获得平面的倾斜度变化趋势。
2.3 柜位(容)、活塞运动速度等计算
实际测量的中心点O与最小二乘平面的中心点O′之间距离即为平面z=a x+b y+c在z轴上的截距,即O O′=|c|,如图3所示。
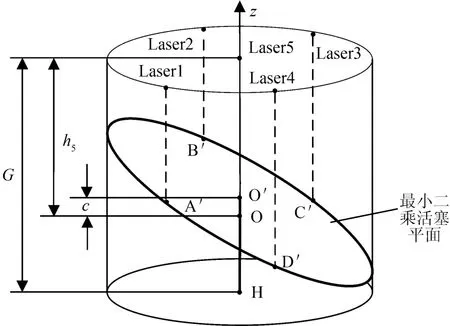
图3 柜位计算示意图
已知上柜面支架至底面的距离为G,t1时刻柜位ht1可由式(5)计算为

通过式(6)对实际柜位积分可得t1时刻柜内气体体积V由式(6)表示为

通过式(7)对柜位变化求全微分,可得到活塞垂直方向的运动速度为

通过式(8)对活塞运行速度进行全微分,可得活塞垂直方向运动加速度为

3 软件设计
系统的上位机软件设计分为底层程序设计和上位机界曲设计。系统选用基于虚拟仪器技术的LabVIEW软件。图4为检测系统软件设计流程图。本系统由串口通讯图模块、数据转化模块,数据处理模块,3 D图像显示模块和历史数据查询模块组成。
(1)串口通讯模块使激光测距传感器通过串口与工控机进行通讯,将距离等测量数据上传至工控机。
(2)数据转化模块测量数据的数据类型在进入LabVIEW后被转化为字符串类型,需要将测量数据转化为十进制数。
(3)数据处理模块根据已建立的活塞平台运动姿态三维模型,对获取数据进行相应的处理,可以获得实时柜位、活塞平台倾斜度、活塞平台运动速度、活塞平台运动加速度等。
(4)3 D图像显示模块实时动态显示活塞平台的运动姿态。
(5)历史数据查询模块进行历史数据的存储,并提供历史数据的查询功能。

图4 软件设计流程图
为了便于工作人员操作,设计了可供参数设置的实时数据显示主界面以及数据记录回放界面,并且具有超限声光报警功能。图5为截取的实际测量时显示主界面,图6为3 D监控画面。主界面显示包括:柜位、柜容、活塞运动速度、活塞运动加速度、活塞倾斜角度等的实时测量值,并提供倾斜度超限报警、柜位超上限报警、柜位超下限报警、速度超限报警等多角度的监测。在后面数据选项卡进行活塞半径、活塞总高度、倾斜度限额、柜位上、下限额、速度限额的输入,可以满足不同柜型的要求[9-11]。

图5 煤气柜活塞平台运动姿态检测系统监控主界面图
4 系统不确定度分析
测试系统不确定度的主要来源:激光测距传感器误差,激光传感器安装位置误差,标准平面平面度误差[12-15]。
(1)激光测距传感器的误差
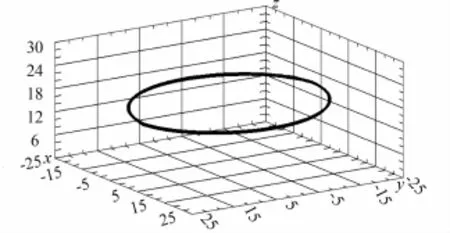
图63 D图像显示界面图/m
用一标准平面分别将5只激光测距传感器,在1000~7000m m范围内进行多次标准距离测量,可得到传感器Laser1~Laser5的重复测试数据如表1所示。

表1 激光测距传感器重复测试数据/m m
由表可分别计算每只传感器测量误差的平均值,比较已得出的误差值值的大小,取其中最大的误差值,即5只传感器中误差最大的一只作为传感器误差[16]。经比较后,选取Laser1的重复测量误差作为传感器误差u1为±1.48 m m
(2)传感器安装位置误差
激光测距传感器位置由机械结构保证,由于焊接等原因会产生位置误差,据实际测量,该误差u2可控制在±2 m m,且该误差为系统误差,运行时可通过校零进行误差补偿。
(3)标准平面平面度误差
经过API激光测距仪测量,用于误差标定的标准平面的平面度误差u3为±0.05 m m
(4)系统的误差可由合成误差u表示为

经过系统不确定度分析和实际运行,系统的测量绝对误差不大于3 m m,满足检测现场的技术要求,即小于30 m m。
5 结语
大型活塞平面运动姿态的传统检测方法自动化程度低、测量准确性差、对检测人员的人身安全具有一定的威胁。文章提出的基于3 D仿真的大型活塞平面运动姿态检测系统,通过建立活塞平台运动姿态模型,实时检测活塞平台运动状态数据并进行数据分析,大大提高了系统测量精度,提升了煤气储气柜长期运行中的安全性和稳定性,很大程度上保证了检测人员的人身安全。系统对于同类型煤气储气柜具有一定的推广价值,大型活塞平面运动姿态模型对于其他大型运动平面姿态检测的研究有一定的借鉴作用。在后续的工作中在可以通过分析活塞平台实时运动数据,对活塞平面运动趋势进行预测。
[1] 刘占刚,黄示礼,罗松.威金斯煤气柜密封橡胶布帘破损分析及处理[J].冶金动力,2009(4):32-34.
[2] 祁耀斌,杨锦园,姜德生.光纤柜位仪测量煤气柜偏移的研究[J].国外建材科技,2005,26(3):63-64.
[3] 潘莉.基于高精度倾角传感器的活塞倾斜度在线监测[J],冶金动力,2012(5):26-28.
[4] 冯晶,田小果.雷达柜位计在宝钢煤气柜上的应用[J].自动化与仪器仪表,2006(6):70-71.
[5] 贾文亚,熊禾根.威金斯型煤气柜活塞倾斜度评价体系与方法研究[J].机电工程技术,2008,37(4):24-24,47.
[6] 靳丽静.基于激光球面法桥梁变形动态监测系统的研究[D].济南:山东建筑大学,2014.
[7] G B/T 11337—2004.平面度误差检测[S].北京:中国标准出版社,2004.
[8] 叶珉吕,花向红,陈西江,等.基于正交整体最小二乘平面拟合的点云数据去噪方法研究[J].测绘通报,2013(11):37-39.
[9] 陈万里,王丽霞.基于LabVIEW的虚拟仪器的研究.仪器仪表用户[J].2007,14(6):14-15.
[10]陈鹏,蔡强富,刘美全,等.基于LabVIEW的电磁超声数据采集与处理系统设计[J].计算机测量与控制,2013,21(3):816-818.
[11]李迺璐,吕跃刚,范晓旭.基于LabVIEW风电监控系统的通信设计与实现[J].计算机应用与软件,2010(5):30-33.
[12]戴小磊,曹学东,杨文志,等.三点法检测环形平面的平面度误差[J].光电工程,2010,37(5):52-55,62.
[13]周景亮,林志熙.大型平面平面度误差的可视化处理[J].机床与液压,2009,2(10):130-132,136.
[14]邵宏伟,张旭东,郑庆国,等.在线平面度测量仪[J].计量学报,2006,27(3 A):182-185.
[15]王文超.大型平面在线测量系统关键技术的研究[D].大连:大连海市大学,2012.
(学科责编:李雪蕾)
Study of the piston moving posture detecting 3D system of large piston plane
Li Hongmin1,Niu Xiaoguang1,Ma Yuzhen2,et al.
(1.School of Information&Electrical Engineering,Shandong Jianzhu University,Jinan 250101,China;2.School of Mechanical Engineering,University of Jinan,Jinan 250022,China)
The gasmeter position,the angle of piston inclination and piston moving speed are important indicators tomonitor the running state of the gas gasmeter.The limitation is common,for the detection method can only be used to monitor one of the indicators.In this paper,the motion attitude detection system of the gasmeter piston is established,the model and the analysis of the movement posture of the moving attitude detection is built,the system software on the LabVIEW platform is designed,the uncertainty of the system analyzed,proving that this system can meet the requirements of high precision detection of the user and monitor the movement of the piston of the gasmeter on line.
large piston plane;moving posture;laser distancemeasuring sensor;online detection
TP27
A
2015-03-09
山东省自然科学基金项目(编号ZR2013EEL004)
李红民(1964-),男,副教授,博士,主要从事精密仪器与测量等方面的研究.E-mail:lhm0023@sdjzu.edu.cn
1673-7644(2015)05-0471-05
猜你喜欢
环球时报(2023-02-09)2023-02-09
山东冶金(2022年4期)2022-09-14
农业工程技术(2022年1期)2022-04-19
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
小学生作文选刊·低年级版(2014年8期)2014-08-19
汽车与新动力(2014年5期)2014-02-27
汽车与新动力(2014年4期)2014-02-27
汽车与新动力(2014年3期)2014-02-27
