交流永磁同步伺服电机的参数自整定模糊PI控制
2015-05-22 03:06李鹏飞景军锋
西安工程大学学报 2015年3期
李 抗,张 蕾,李鹏飞,景军锋
(西安工程大学 电子信息学院,陕西 西安710048)
0 引 言
交流永磁同步伺服电机作为数控机床、工业机器人等的重要驱动部件,具有效率高、体积小、适应性强和可靠性好的优点[1].随着现代控制技术和电子元器件的发展,其在工业控制领域得到了广泛使用,对其性能的要求也日益提高,而永磁同步伺服电机的性能取决于控制方法[2].因此,研究交流永磁同步伺服电机的控制系统设计具有十分重要的现实意义.
交流伺服系统速度调节器的设计依据是对被控对象建立数学模型,而交流永磁同步电机是一个非线性、耦合性强且高阶、多变量的复杂系统,要想得到其准确的数学模型非常困难.而且,在实际运行的过程中,电动机的很多参数会受到现场运行环境的影响而发生不可预知的变化[3],这些因素会严重影响到交流永磁同步电机的控制性能.在一些精度要求高的场合,传统的PI调节器很难满足性能要求[4].模糊控制作为一种先进的非线性控制方法,其显著的优点是对系统模型的依赖低,不需要精确的数学模型,运行方式类似于人类的思维,只需要把成功实践操作的历史经验值用控制规则进行模型化,再根据控制系统的实际响应情况,用模糊推理作出相应的决策.在过去几十年里,模糊控制理论得到迅速发展,英国工程师马丹尼利用模糊控制语言研制成功模糊控制器,并把它应用于蒸汽机和锅炉的控制,使模糊控制得到了飞跃发展.丹麦的Smidlh公司用模糊控制技术控制了秋田市的一家水泥厂.目前模糊理论在电机控制领域已经有很多成功的应用实例[5],文献[6-7]通过仿真验证了基于模糊规则的控制器在永磁同步电机矢量控制系统中的有效性.在模糊控制器的控制策略中,模糊表的判定规则的设定是模糊控制器能否达到更好的控制效果的关键.
针对上述传统PI调节器应用时存在的问题,本文提出一种参数自整定模糊控制策略,设计了基于这一控制策略的模糊PI控制器,并应用在交流永磁同步电动机的矢量控制调速系统的速度控制环中.所设计的模糊PI控制器不要求精确已知的数学模型,而是通过在线自整定PI调节器的参数Kp,Ki来实时满足当前的运行条件,充分发挥PI调节器的优良控制作用.经过Simulink仿真的结果表明,在动态性能上,所设计的参数自整定模糊PI调节器在高速和低速的条件下的调节效果优于传统的PI调节器.
1 id=0控制方式
为了更加简单地分析和设计控制器,在永磁同步电机的各种电流控制方法中,通常采用忽略铁损时的d,q轴的数学模型.基于这一前提,永磁同步电机的电压状态变量之间的微分方程可整理为
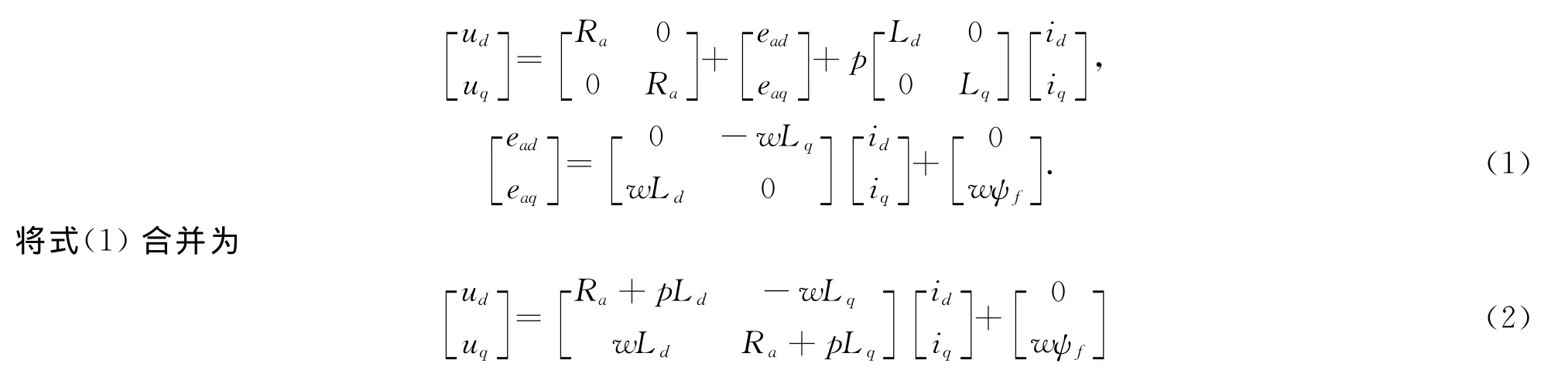
式(1),(2)中,ud,uq分别表示定子d,q轴电压;id,iq分别表示定子d,q轴电流;Ld,Lq分别表示定子绕组d,q轴的自感.Ra表示定子绕组电阻;p表示微分算子,有p=d/d t;Ψf表示永磁体产生的磁链,为常数.电磁转矩方程为

其中,pn为转子的磁极对数.
本文采用永磁同步电动机最常用的转速、电流双闭环控制策略.电机是面装式永磁同步电机,因此Ld=Lq.采用id=0控制,因为当采用id=0的电流控制方式时,电磁转矩与q轴的电流成线性关系,因此控制好q轴的电流大小,就可以在转子磁场定向情况下,实现很好的转矩控制.其控制原理框图如图1所示.
2 控制器设计
由于永磁同步电动机的数学模型是一个非线性的被控对象,在长期的运行过程中其参数会发生未知变化,而传统PI调节器的参数并不能自动调节来和实际的被控对象以及运行条件相匹配,因此系统的鲁棒性很难保证.在这种情况下利用模糊控制器调节参数可以有效解决这一问题.模糊控制器不需要精确的数学模型,只需要把操作人员进行实时非线性调节的成功实践操作经验用控制规则进行模型化,再根据控制系统的实际响应情况,用模糊推理作出相应的决策,在线调整PI调节器的参数Kp,Ki来充分发挥PI调节器的优良控制作用.
本文采用参数自整定的模糊PI调节器来改进速度环的传统PI调节器,根据模糊控制的基本原理,通过以下步骤设计模糊PI调节器:
根据对系统的分析,将模糊控制器的维数确定为2维,以速度偏差e和偏差的变化率e(c)作为模糊控制器的输入[8].
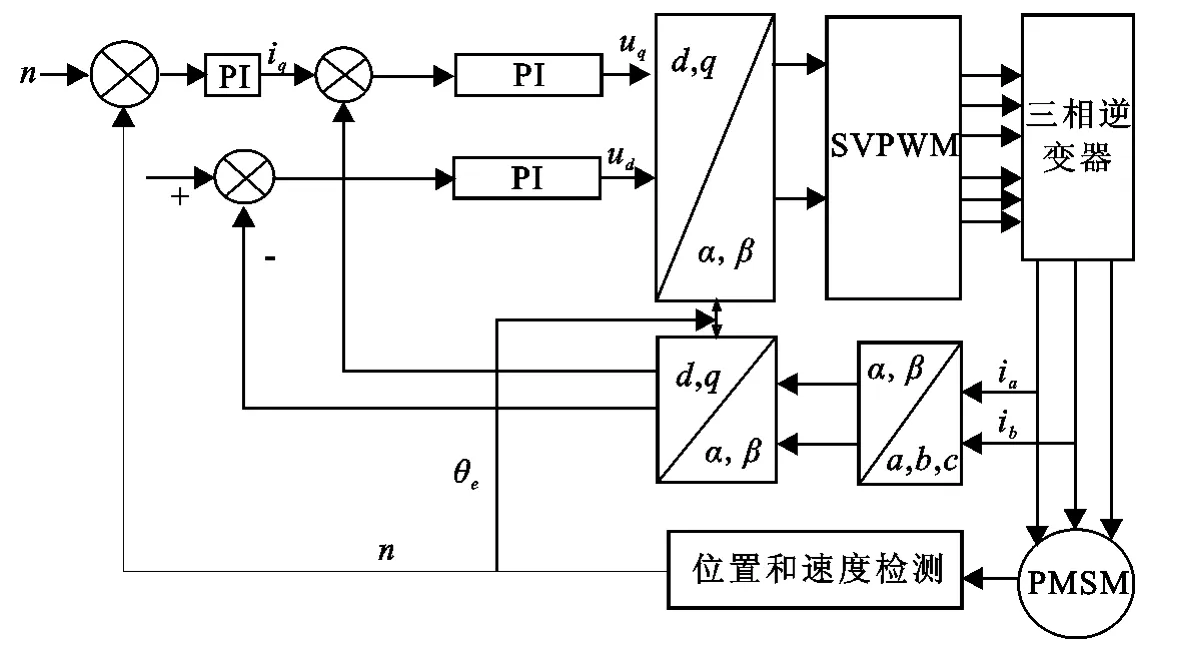
图1 基于转子磁场定向的控制原理框图Fig.1 The control principal diagram based on rotor field oriented
将输入e和e(c)的模糊子集表述为{负大、负中、负小、零、正小、正中、正大},将其记为{NB、NM、NS、ZO、PS、PM、PB},将e和e(c)量化,本文取e和e(c)的模糊论域为{-3,-2,-1,0,1,2,3}.同样将Kp,Ki的修正值ΔKp和ΔKi的模糊子集也表述为{负大、负中、负小、零、正小、正中、正大},将其记为{NB、NM、NS、ZO、PS、PM、PB},对其量化,ΔKp和ΔKi的模糊论域取为{-3,-2,-1,0,1,2,3},可得到
其中,Kp和Ki为调节器中的初始值.
在将输入量化和将输出清晰化的过程中涉及到量化因子和比例因子的确定.量化因子即把清晰值从物理论域(变量的时间变化范围)变换到模糊论域的变换系数的确定[9].这一变换在模糊控制器中的作用,是使输入信号的取值范围放大或缩小,以适应设定的模糊论域要求.具体算法如下:若已知输入变量X的一个分量x的物理论域X=[-m,m](x>0),其模糊论域N=[-n,n](n>0).则从X到N 的变换系数k即为量化因子k=n/m.设置量化因子k后,就可以在输入变量的物理论域X变化时,只改变量化因子就可以使输入量变化后仍然落在原来的模糊论域里,从而使模糊控制器的核心部分保持不变.经过模糊推理后得出的是模糊量,需要将其清晰化变成清晰量,即选定一个清晰数值去代表某个表述模糊事物或概念的模糊集合,才能推动后面的执行机构.采用不同的清晰化方法得到的系统特性就会有所不同.本文采用重心法(centroid),充分利用输出模糊集合提供的有用信息[10],保证所设计的模糊PI调节器的控制性能.ΔKp和ΔKi的清晰化过程是依据式计算

其中,ΔKp为清晰化输出量,ΔKpn为输出量,μ为模糊隶属度函数,p为单点集数.

图2 隶属度函数Fig.2 Membership function
清晰化处理后的变量虽然是清晰值,但是取值范围是由模糊推理得到的所有F子集确定的,其取值范围与后面执行机构要求的实际物理论域不一定一致,因此也需要进行论域的变换.这个由模糊论域到物理论域的变换系数叫比例因子,若输出量的模糊论域N = [-n,n],执行机构要求输入的的控制量u的物理论域U=[-u,u],则比例因子为Ku=u/n.根据输入和输出的模糊论域,且设输入和输出各量均服从如下的隶属度函数分布曲线.如图2所示,横坐标表示模糊论域,纵坐标表示隶属度函数值,只有数学意义没有物理意义.
通过各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PI参数的模糊矩阵表,查出修正参数从ΔKp和ΔKi,可以得到修正的ΔKp和ΔKi[12].根据输入e和e(c)对输出ΔKp和ΔKi的影响,制定了49条控制规则,模糊规则表见表1.
在MATLAB/Simulink环境下建立交流永磁同步电动机伺服系统的仿真模型,将设计好的参数自整定模糊PI调节器加入该系统,并对参数自整定模糊PI调节器的模糊控制策略进行仿真.该仿真系统的参
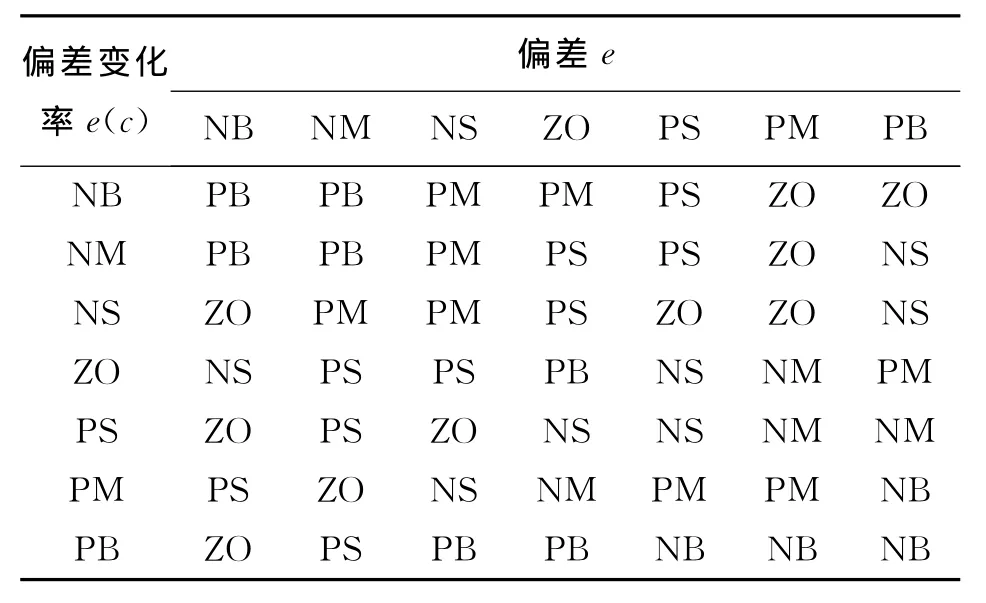
表1 模糊规则表Table 1 Fuzzy rule table
3 仿真结果与讨论
3.1 仿真模型的建立
利用MATLAB中的Simulink软件建立转速、电流双闭环调速系统模型,其中速度环调节器为所设计的参数自整定模糊PI调节器,交流永磁同步伺服电机的模糊PI仿真模型如图3所示,参数自整定模糊PI调节器的仿真模型如图4所示.

图3 交流永磁同步伺服电机的模糊PI仿真模型Fig.3 The fuzzy PI Simulation model of PMSM
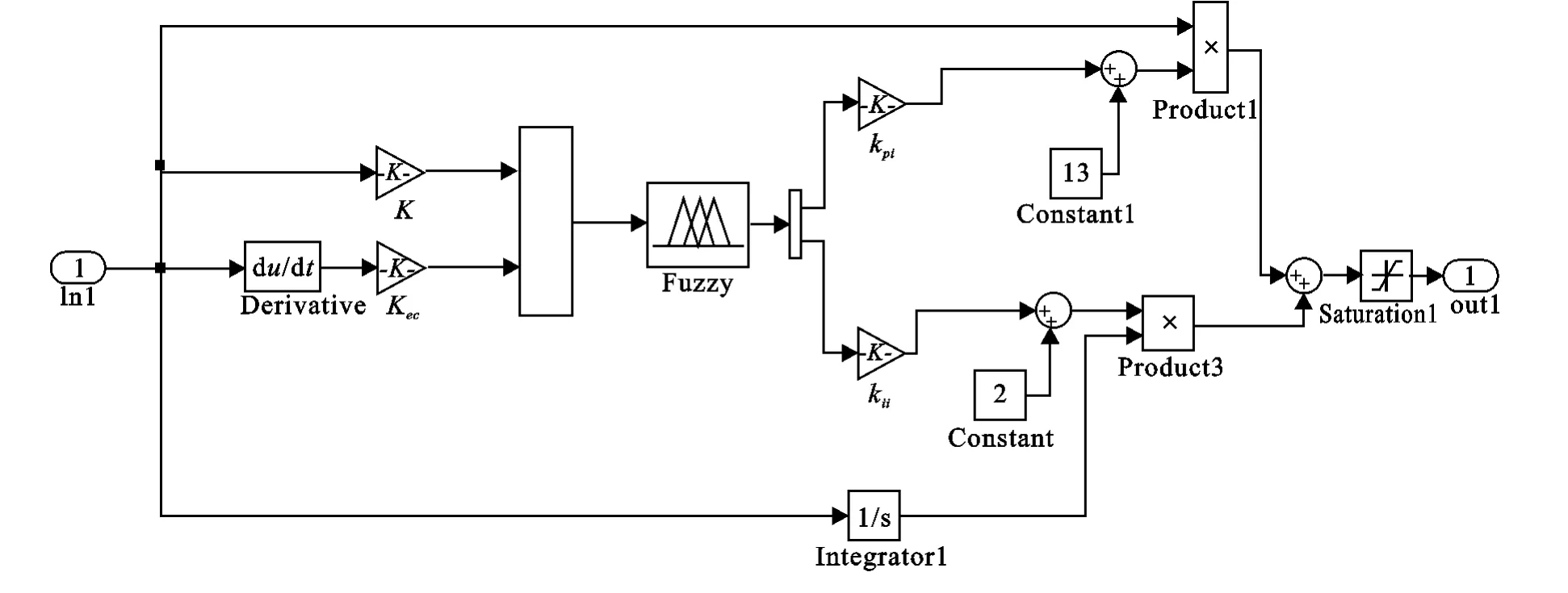
图4 模糊PI调节器的仿真模型Fig.4 Simulation model of fuzzy PI regulator
3.2 仿真结果
数为:电动机定子绕组R=2.875Ω,转动惯量J=8×10-3kg·m2,电动机极对数Pm=4,定子电感Ld=Lq=8.5×10-3m H,转子磁链 Ψf=0.175Wb,粘滞摩擦系数 F=0.设仿真时间为0.5s,给定速度值500r/min和1 000r/min,系统启动负载转矩T=4N·m,当系统运行到0.04s时,增加负载转矩T=9N·m,Simulink的仿真波形如图5~6所示.
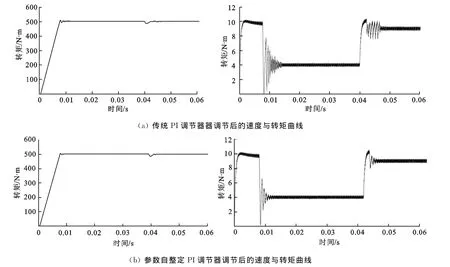
图5 n=500r/min时速度曲线和转矩曲线比较Fig.5 Comparison of speed and torque while n=500r/min
在低速启动时,当给定速度值为500r/min时,图5(a)左为传统PI控制的速度响应曲线,图5(a)右为转矩响应曲线,图5(b)左为本文所设计的参数自整定模糊PI控制的速度响应曲线,图5(b)右为转矩响应曲线.从图5(a)和图5(b)的曲线对比表明,电机以T=4N·m的负载启动,在所设计的参数自整定模糊PI调节器的作用下转速很快便达到稳定.当负载转矩波动时,转速只有微小波动,并且短时间重新到达稳态.当负载在t=0.04s突加至T=9N·m时,转速波形出现下降后,经过调节器的作用后很快又稳定在给定值.通过上面传统PI调节器调节后的转速曲线和本文所设计的参数自整定模糊PI调节作用后转速曲线的对比,可以明显的看到,在负载突变时,前者转速回复速度比后者要快,且波动小.表明参数自整定模糊PI控制比传统PI控制对于伺服系统的动态性能有较大的改善.并且,突然增加负载后速度回复到原给定值的过程中,经过本文所设计的参数自整定模糊PI调节器调节后的超调量也比经过传统PI调节器调节后的超调量小.而通过图5中电磁转矩波形的对比,可以看出经过参数自整定模糊PI调节器作用后的响应波动也明显比传统PI调节器作用下的振荡幅值更小.
在高速启动时,当给定速度值为1 000r/min时,图6为传统PI控制的速度响应曲线(图(a)左)和转矩响应曲线(图(a)右)和本文所设计的参数自整定模糊PI控制的速度响应曲线(图(b)左)和转矩响应曲线(图(b)右)对比.从图6可以看到,本文所设计的参数自整定模糊PI调节器调节后的速度响应曲线比传统PI调节器调节后的速度响应曲线更加快速地达到稳态,且当负载转矩波动时,前者比后者的抖动更小,回复稳态更加快速.而通过图6中的转矩曲线对比表明,在t=0.04s负载突加至T=9N·m时,参数自整定的模糊PI调节后的转矩比传统PI调节后的转矩更快回复稳定,说明参数自整定模糊PI能更好的抑制转矩的突变.
通过图5和图6的对比表明,当速度给定值越大时,如果负载发生突变,电磁转矩的抖动越明显.而本文所设计的参数自整定模糊PI控制器较之传统PI调节器可以更快稳定电磁转矩的抖动.

图6 n=1 000r/min时速度曲线和转矩比较Fig.6 Comparison of speed and torque while n=1 000r/min
分析上述情况,关键原因是由于参数自整定模糊PI控制能够快速准确识别误差e和误差的变化率e(c),对电流环的电流输入量进行适时的调整,快速准确地对负载变化进行跟踪,使系统的转矩、转速等动态性能都有了一定程度的提高.
4 结 论
(1)在参数设计合适的情况下,通过Simulink进行仿真发现,模糊控制器能够根据实际情况实现对速度控制器的PI参数的最佳整定.
(2)仿真结果说明,该方法有效克服了传统PMSM矢量控制系统负载突变时振荡较大的缺点,具有较快的响应速度和较好的鲁棒性,在动态性能方面其优越性更加显著.
[1] 王庆龙,张兴,张崇巍.永磁同步电机矢量控制双滑模模型参考自适应系统转速辨识[J].中国电机工程学报,2014,34(6):896-898.WANG Qinglong,ZHANG Xing,ZHANG Chongwei.Double sliding-mode model reference adaptive system speed identifiction for vector control of permanent magnet synchronous motors[J].Proceedings of the CSEE,2014,34(6):896-898.
[2] 高子龙,李志刚.基于模糊控制策略的位置伺服系统研究[J].微电机,2013,46(1):67-70.GAO Zilong,LI Zhigang.Research of position systems based on fuzzy controller[J].Micromotors,2013,46(1):67-70.
[3] 程飞,过学迅,别辉.电动车用永磁同步电机的双模糊控制研究[J].中国电机工程学报,2007,27(18):18-21.CHENG Fei,GUO Xuexun,Bie Hui.The double fuzzy control of PMSM in electric vehicle[J].Proceeding of the CSEE,2007,27(18):18-21.
[4] 李爱平,邓海洋,徐立云.基于模糊PID的永磁同步电机矢量控制仿真[J].中国工程机械学报,2013,11(1):25-30.LI Aiping,DENG Haiyang,XU Liyun.Fuzzy PID based PMSM vector control simulation[J].Chinese Journal of Xonstruction Machinery,2013,11(1):25-30.
[5] 张洪帅,王平,韩邦成.基于模糊PI模型参考自适应的高速永磁同步电机转子位置检测[J].中国电机工程学报,2014,34(12):1889-1891.ZHANG Hongshuai,WANG Ping,HAN Bangcheng.Rotor position measurement for high-speed permanent magnet synchronous motors based on fuzzy PI MARS[J].Proceeding of the CSEE,2014,34(12):1889-1891.
[6] 丁双文,胡育文.永磁同步电机模糊PID参数自整定[J].微特电机,2011,39(5):17-21.DING Shuangwen,HU Yuwen.Fuzzy PID parameter self-turing control for PMSM servo system[J].eMotor,2011,39(5):17-21.
[7] 杨明,张扬.交流伺服系统控制器参数自整定及优化[J].电机与控制学报,2010,14(12):29-33.YANG Ming,ZHANG Yang.Gain selftuning of PI controller and parameter optimum for PMSM drives[J].Electroc Machines and Contril,2010,14(12):29-33.
[8] 朱卫华,杨向宇.永磁同步电机调速系统新型模糊控制方法[J].微特电机,2005,10(6):29-34.ZHU Weihua,YANG Xiangyu.A novel fuzzy control strategy of PMSM speed servo system[J].2005,10(6):29-34.
[9] 许道金,杨庆东,衣杰.永磁同步直线电机模糊PID控制及仿真[J].机械工程与自动化,2014,3(1):161-163.XU Daojin,YANG Qingdong,YI Jie.Fuzzy PID control and simulation experiment on permanent magnet linear synchronous motor[J].Mechanical Engineering & Automation,2014,3(1):161-163.
[10] 崔厚梅,郭西进,刘克林.模糊自适应PID在转速控制中的应用[J].自动化技术与应用,2009,28(9):101-103.CUI Houmei,GUO Xijin,LIU Kelin.Fuzzy-adaptive PID control in the speed control system[J].Techniques of Automation and Applications,2009,28(9):101-103.
[11] 石辛民,郝整清.模糊控制及其 MATLAB仿真[M].北京:清华大学出版社,2008:94-96.SHI Xinmin,HAO Zhengqing.Fuzzy control and MATLAB simulation[M].Beijing:Tsinghua University Perss,2008:94-96.
[12] SINGH Bhim,SINGH B P,DWIVEDI Sanjeet.DSP based implementation of hybrid fuzzy PI speed controller for direct torque controlled permanent magnet synchronous motor drive[J].International Journal of Emerging Electric Power Systems,2007,8(2):2235-2240.
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年2期)2021-06-09
宇航计测技术(2018年3期)2018-09-08
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
汽车与新动力(2015年1期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01