基于SimulationX的高空作业平台虚拟样机的开发
2015-05-25 00:29李晖柏艳红
太原科技大学学报 2015年3期
李晖,柏艳红
(太原科技大学电子信息工程学院,太原 030024)
基于SimulationX的高空作业平台虚拟样机的开发
李晖,柏艳红
(太原科技大学电子信息工程学院,太原 030024)
以自行走直臂式高空作业平台为例,根据其机械结构将其分为俯仰机构、伸缩机构以及调平机构。应用SimulationX解决俯仰机构与调平机构的旋转关节以及伸缩臂伸缩机构设计等问题,搭建高空作业平台虚拟样机模型,为工作人员在各种虚拟环境中模拟其液压系统的运行以及更好地进行液压系统仿真提供一个便捷、直观的分析环境。
高空作业平台;SimulationX;虚拟样机;液压系统
高空作业平台是运送人员、材料和工具到指定位置进行工作的设备,它融合了液压传动、电气控制等技术[1-2]。自行走式高空作业平台结构小巧,移动方便,直臂式作业高度与幅度大,安全性高,随着该行业的发展,自行走直臂式高空作业平台将倍受青睐。但是,像高空作业平台这种大型设备,不仅制作成本高,而且短期内完成一次系统的全面性能测试也难以实现,可见建立一个可靠高效的仿真平台是必要的。
研究该类大型机械性能,往往通过构建其虚拟样机仿真模型来实现。随着研究对象中各机械结构、电子元件、液压系统不断融合并且复杂化,计算机仿真技术在机电液系统中的应用在不断普遍。目前大部分研究采用ANSYS、MATLAB、ADAMS、RecurDyn、AMESim等软件进行联合仿真[3]。然而进行联合仿真的同时,必然会存在数据的传输、连接接口的调试或者多个系统的调用等问题,降低了仿真效率与准确性。而对于SimulationX其建模理念是提供一个机电液一体的建模仿真平台[4-6]。
本文选用SimulationX来构建高空作业平台虚拟样机,设计其俯仰机构、伸缩机构以及调平机构,能够模拟系统工作过程中遇到的复杂环境,为观察高空作业平台的实际运行过程提供一个便捷、直观的分析环境,解决了该类大型设备难以短期内实现系统全面性能测试的问题[7-8]。
1 高空作业平台结构
以10V02002自行走直臂式高空作业平台为研究对象,该高空作业平台结构如图1所示。自行走直臂式高空作业平台俯仰机构、伸缩机构以及调平机构由各自对应的液压系统进行连接驱动,作业过程中通过三个机构协调配合保证将工作人员安全运送到指定地点,工作斗为工作人员提供安全的工作环境。
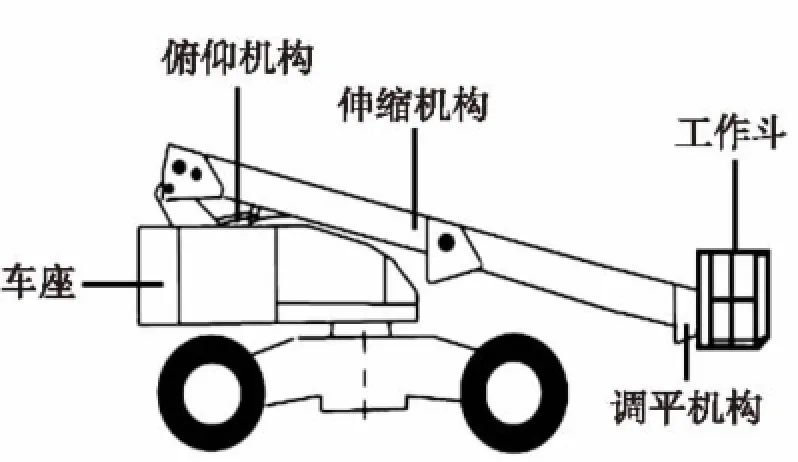
图110 V2002自行走直臂式高空作业平台Fig.1 The self-propelled aerial work platform
10 V02002 自行走直臂式高空作业平台实际参数见表1.
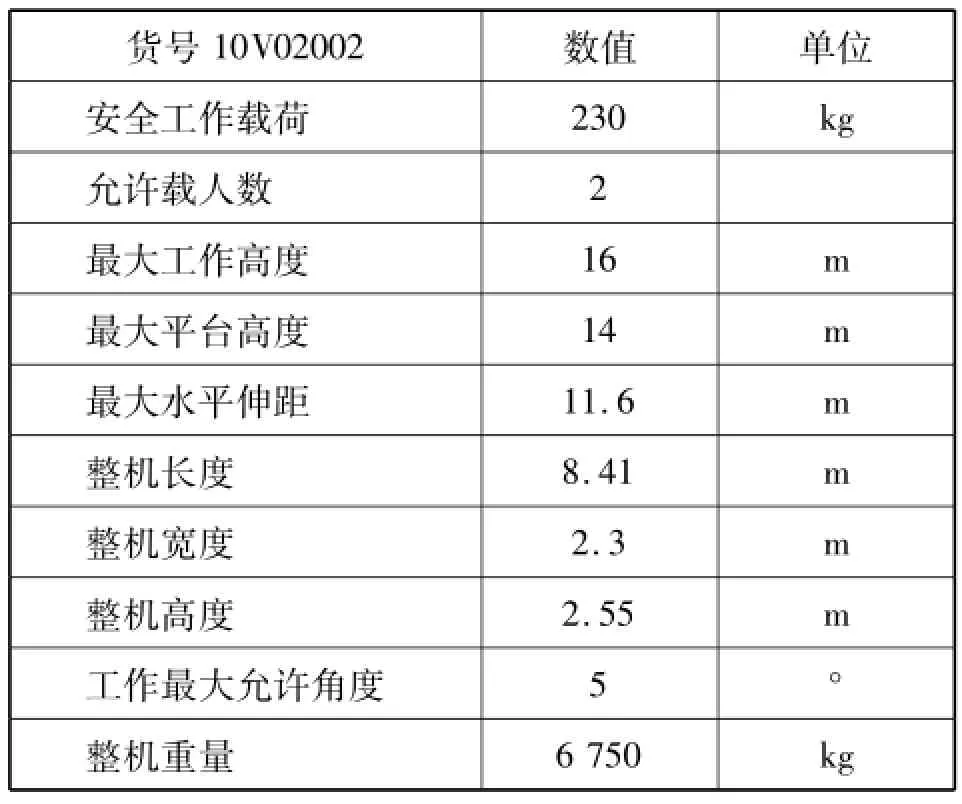
表110 V02002自行走直臂式高空作业平台参数Tab.1 The parameters of 10V02002 self-propelled aerial work platforms
2 高空作业平台虚拟样机设计
在高空作业平台模型中,俯仰机构、调平机构以及伸缩机构主要元件为液压缸,其模型可直接调用SimulationX软件中的液压缸模型来搭建。对于高空作业平台车座以及工作斗模型,则需借助Solidworks来进行三维建模。
2.1 车座和工作斗建模
根据表1-1中10V02002直臂式高空作业平台实际参数,应用Solidworks搭建高空作业平台车座与工作斗三维模型。需要注意的是,在建模过程中为方便模型在SimulationX中的导入,三维模型保存格式为stl格式。高空作业平台车座、工作斗模型如图2所示。
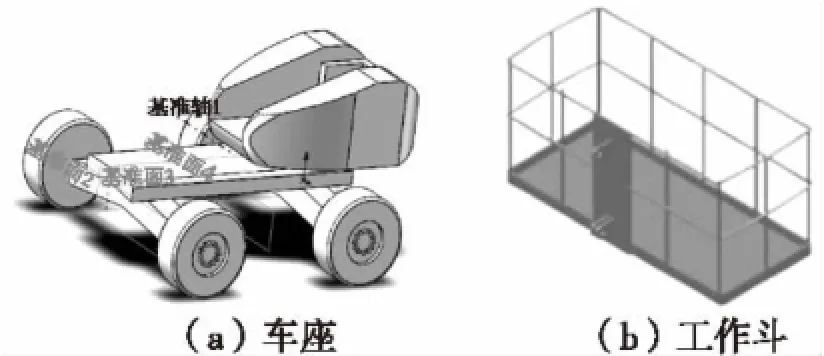
图2 高空作业平台车座、工作斗模型Fig.2 The models of aerial work platform bodywork and workbench
2.2 三维模型导入SimulationX
在SimulationX中,导入三维模型用到元件CAD-import,在该元件属性窗口中点击“加载”按钮,选择车座与工作斗的三维模型导入SimulationX,在New 3D View窗口中即可查看。导入后设置模型属性。
2.3 俯仰机构与调平机构建模
车座与伸缩机构连接以及伸缩机构与工作斗连接通过设置旋转关节RevoluteJoint来实现。在俯仰机构中,将俯仰液压缸与旋转关节并联;在调平机构中,调平方式采用电液比例调平,将调平液压缸与旋转关节并联,通过调平液压缸伸缩使工作斗围绕该旋转关节运动来实现调平。
旋转关节需根据实际数据设置其大小尺寸,调整其在三维模型中恰当的位置。俯仰机构模块与调平机构模块中液压缸模型直接选择元件库中的元件,液压缸属性设置如图3所示。在该元件属性中,在“界面显示”选择这一选项中,选择液压缸(hydraulic cylinder),这样就可在三维建模窗口中显示液压缸模型。

图3 液压缸属性窗口Fig.3 The property window of hydraulic cylinder
2.4 伸缩机构建模
伸缩机构驱动方式主要有液压驱动与链条驱动,一般工作高度高的伸缩臂使用多节臂。这里我们建立液压缸驱动的二节伸缩臂,通过控制伸缩臂内液压缸,实现伸缩臂二节臂延伸与收缩。
伸缩机构模型搭建使用元件移动关节PrismaticJoint进行连接,并在其两侧添加元件Cuboid作为移动对象,液压缸与移动关节通过并联方式连接,控制液压缸活塞的移动来实现移动关节两端移动对象的移动。伸缩机构模型如图4.
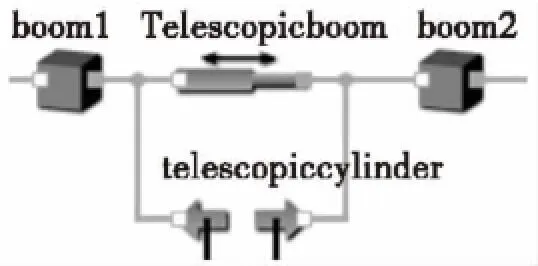
图4 伸缩机构模型Fig.4 The model of telescopic mechanism
最终,将高空作业平台各个机构模型依次连接,伸缩机构两侧分别与俯仰机构和调平机构的旋转关节相连,高空作业平台的整体三维模型如图5所示。
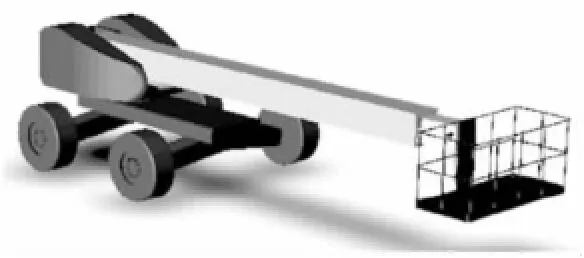
图5 高空作业平台三维模型Fig.5 3D model of aerial work platform
3 液压系统建模
液压系统包含动力元件、执行元件、控制元件、辅助元件及液压油,建立高空作业平台俯仰液压系统如图6所示。其中,油泵提供动力源,液压控制阀根据控制信号将液压油以特定的压力、流量及方向注入液压缸,通过液压缸的收缩滑动来控制高空作业平台的运行。
液压控制系统中,信号源通过PID控制环节将控制信号传递至液压控制阀,控制液压阀阀心位置来控制液压缸的伸缩。在输出环节又将液压缸活塞的运动位移反馈到输入环节,形成一个闭环的控制回路。
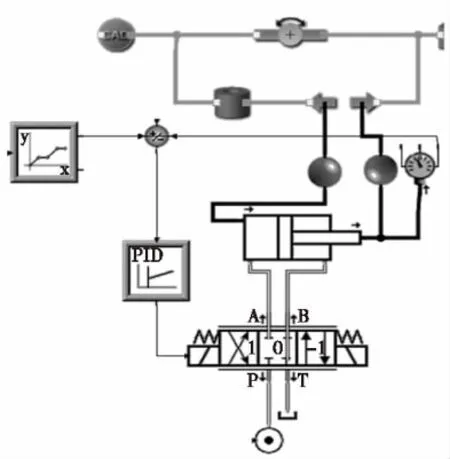
图6 俯仰液压系统Fig.6 The hydraulic luffing system
对高空作业平台俯仰系统、伸缩系统以及调平系统分别添加液压控制系统,根据机械手册调节液压系统参数,最终获得高空作业平台整体仿真模型如图7所示。
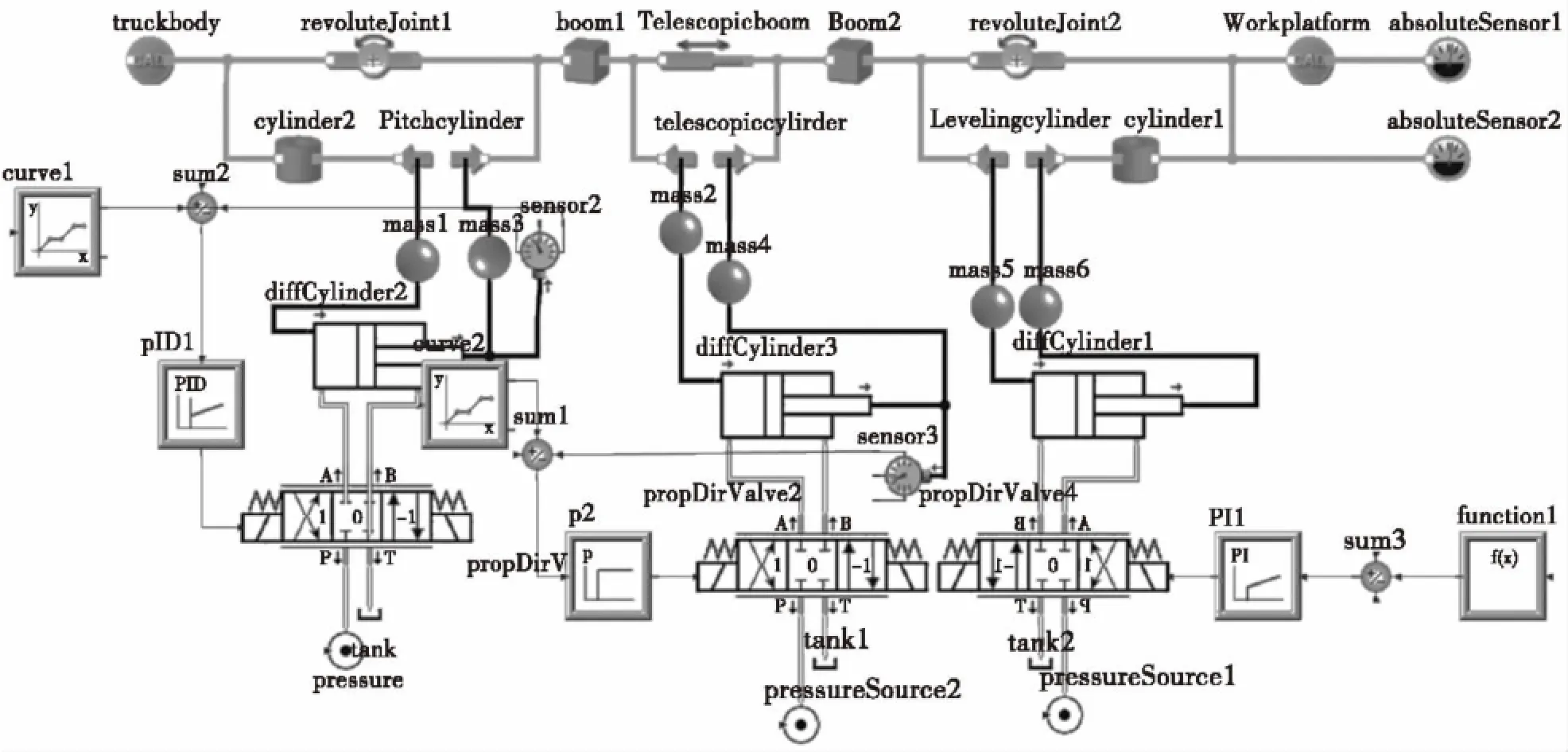
图7 高空作业平台仿真模型Fig.7 The simulation model of aerial work platform
4 高空作业平台虚拟样机的运行
高空作业平台仿真模型搭建完成后,对俯仰机构、伸缩机构分别添加一定幅值的阶跃控制信号。点击运行,在俯仰液压缸与伸缩液压缸位移属性窗口中,能够观察各个液压系统液压缸活塞位移的变化,如图8所示。同时在New 3D View窗口中能直观观察高空作业平台虚拟样机的运行,如图9所示。
根据各个液压系统运行结果窗口的输出以及高空作业平台虚拟样机的运行,我们可以发现液压控制系统的缺陷并调节对应控制系统参数,使其按照系统性能指标的要求到达目标位置并最终达到稳定状态。
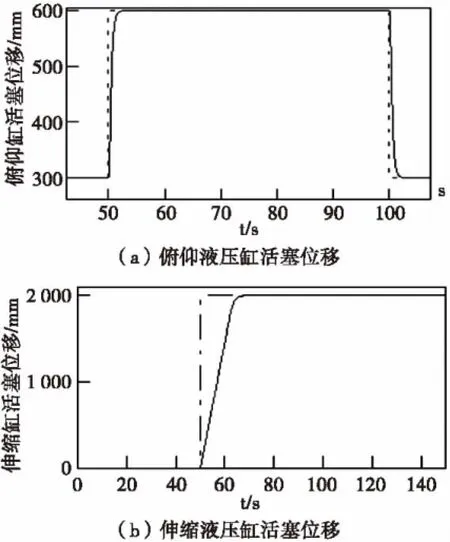
图8 高空作业平台液压缸位移Fig.8 The hydraulic cylinder displacement of aerial work platform

图9 高空作业平台虚拟样机运行Fig.9 the virtual prototype of aerial work platform operation
5 结论
本研究在软件Solidworks的协助下建立高空作业平台的三维模型,应用SimulationX解决高空作业平台各个机构建模,完成了高空作业平台虚拟样机的设计。调试模型液压控制系统并添加液压控制信号,实现了高空作业平台虚拟样机的运行以及液压系统的仿真。通过对高空作业平台虚拟样机的建模与仿真,证明了软件SimulationX在对实际系统性能分析及应用方面的可行性与优越性。
[1]张华,霍玉兰.我国高空作业车行业发展与展望[J].建筑机械,2009(12):38-43.
[2]张伟,李宏杰.4300 mm中厚板全液压滚切剪电液伺服控制系统[J].太原科技大学学报,2014,35(2):123-127.
[3]李谨,邓卫华.AMESim与MATLAB/Simulink联合仿真技术及应用[J].情报指挥控制系统与仿真技术,2004,26(5):61-64.
[4]尹信贤.高空作业车执行机构机电液一体化仿真分析[D].重庆交通大学,2012.
[5]多学科领域建模仿真平台SimulationX[J].CAD/CAM与制造业信息化,2011(1):24-30.
[6]王丽薇,吕晓林.基于ITI-SimulationX的液压挖掘机多路阀建模与仿真[J].机床与液压,2012,40(9):126-128,134.
[7]毛国新.高空作业车整车电液自动调平控制系统的研究[D].浙江工业大学,2013.
[8]R F Abo-Shanab,N Sepehri.Tip-over responses of hydraulic mobile cranes[J].Transactions of the Canadian Society for Mechanical Engineering,2006(3):391-412.
Development of Aerial Work Platforms Virtual Prototype Based on SimulationX
LI-Hui,BAI Yan-hong
(School of Electronic Information Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,China)
Taking the self-propelled aerial work platform as example,it is divided into tilt mechanism,telescopic mechanism and leveling mechanism according to mechanical structure.The problem of revolute joint between tilt mechanism and leveling mechanism,the design of telescopic boom will be solved by applying SimulationX.A convenient intuitive analysis environment will be provided to simulate the operation of hydraulic system and better simulation of hydraulic system by building aerial work platform of virtual prototype model.
aerial work platform,SimulationX,virtual prototype,hydraulic system
TH128
A
10.3969/j.issn.1673-2057.2015.03.007
1673-2057(2015)03-0194-04
2014-12-11
国家自然科学基金(51075291);山西省回国留学人员科研(2012-076)
李晖(1989-),男,硕士,主要研究方向为智能控制理论及应用。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
工业设计(2019年4期)2019-06-11
电子制作(2018年19期)2018-11-14
农业工程学报(2018年14期)2018-08-10
专用汽车(2018年7期)2018-07-24
中国棉花(2017年10期)2017-11-04
航天工业管理(2017年4期)2017-05-12
中国机电工业(2016年9期)2016-12-01