永磁同步电机改进无差拍电流预测控制
2015-06-06 11:40冯景欢夏长亮王贺超阎彦
电工电能新技术 2015年8期
冯景欢,夏长亮,王贺超,阎彦
(天津大学电气与自动化工程学院,天津300072)
永磁同步电机改进无差拍电流预测控制
冯景欢,夏长亮,王贺超,阎彦
(天津大学电气与自动化工程学院,天津300072)
针对永磁同步电机在弱磁过调制工况下产生的电流谐波大、转矩波动大等问题,提出了改进无差拍电流谐波抑制策略。本文对比分析了在模型参数不匹配的情况下改进前后无差拍控制系统的稳态误差,并且分析了改进无差拍控制算法在弱磁过调制区域对电流谐波的抑制作用,同时证明了改进无差拍控制系统的稳定性。实验结果证明了该策略的有效性。
永磁同步电机;无差拍控制;过调制;弱磁控制;电流谐波
1 引言
永磁同步电机(Permanent Magnet Synchronous Motors,PMSM)具有高效率、性能稳定、调速范围宽等优点,广泛应用于交流调速系统中[1]。在高精度伺服控制系统中,对永磁同步电机的调速范围不再局限于基速以下,而是扩展到了基速以上恒功率运行区域。弱磁控制和过调制策略相结合能有效地扩大永磁同步电机的调速范围[2]。
永磁同步电机的弱磁控制是通过增加定子直轴负向电流,利用直轴电枢反应削弱电机的气隙磁场,从而达到等效削弱磁场的目的。过调制策略可以提高逆变器输出的基波电压幅值,提高直流母线电压利用率,进而扩大电机的调速范围。但是电机在应用SVPWM过调制策略后,逆变器输出相电流谐波含量较高[3]。
针对电机运行于弱磁过调制区时存在的电流谐波含量大和转矩波动大等问题,众多学者们对此进行了研究。其中,寻找一种最大电压利用率和最小谐波畸变的过调制策略是减小过调制产生的电流谐波的有效手段之一;另一种抑制永磁同步电机过调制产生的电流谐波的方式是通过改进控制策略来实现的。文献[4]针对弱磁中存在电流谐波的问题,提出了一种新型的积分抗饱和电流控制方法,该方法能减小电流谐波和转矩波动。
无差拍控制可在一个采样周期内使被控变量达到期望值,具有不受PI调节器带宽限制的快速动态响应特性,特别适合于离散控制系统。理想无差拍控制的等效开环增益为无穷大,因此能够有效地抑制电流谐波,近年来无差拍控制在感应电机、无刷直流电机和永磁同步电机控制领域得到了较为广泛的应用[5,6]。文献[5]提出了一种感应电机准无差拍模型预测电流控制策略,将无差拍控制和模型预测电流控制相结合,提高了动态性能,减小了电流谐波和转矩波动。文献[6]对无刷直流电机无差拍控制系统进行了电流误差修正,消除了由电机参数误差和逆变器的非理想特性造成的三相电流稳态误差。
本文将无差拍控制器应用于弱磁过调制工况下的永磁同步电机,解决了电机转矩波动大和电流谐波含量高的问题,同时对无差拍控制器做了改进,进行了误差补偿,消除了无差拍控制器在模型参数不匹配时存在的稳态误差,并通过实验验证了该策略的有效性。
2 PMSM弱磁过调制策略
基速以下时,永磁同步电机转速和转矩的关系如式(1)所示:

由式(1)可以看出,在基速以上时,需要采用弱磁控制策略和过调制控制策略来提高电机的转速,弱磁控制采用电压外环反馈补偿策略。基速以下时,系统采用id=0控制方式;基速以上时,随着转速上升,端电压超过逆变器电压极限后,采用弱磁控制,即采用施加定子直轴去磁电流来减弱气隙磁场的方法来扩大电机的调速范围。
正弦SVPWM调制输出的电压矢量的范围是六边形内切圆。为了充分利用逆变器的性能,使输出电压矢量的范围从内切圆扩大到六边形上,需要采用SVPWM过调制算法。SVPWM过调制区域示意图如图1所示。
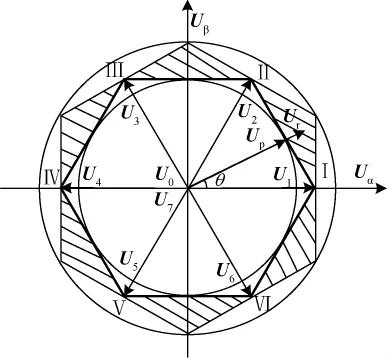
图1 SVPWM过调制区域示意图Fig.1Over-modulation region of PMSM
图1中U1~U6对应两电平逆变器输出的6个非零电压矢量,U0和U7为零电压矢量。图中斜线阴影区表示过调制1区,外面的Ⅰ至Ⅵ区域表示过调制2区。当参考电压矢量Ur的轨迹位于过调制1区时,保持矢量的相位不变,幅值缩减到图中由粗黑线围成的六边形上。当参考电压矢量Ur的轨迹位于过调制2区时,对应图Ⅰ至Ⅵ区域,逆变器输出分别对应U1~U6。
永磁同步电机在基速以上运行时,若采用过调制算法会给系统带来5、7、11、13次谐波,在dq坐标系下对应6次和12次谐波。
3 PMSM改进无差拍控制系统
3.1 无差拍控制器
在同步旋转坐标系下,表贴式永磁同步电机的离散化数学模型为
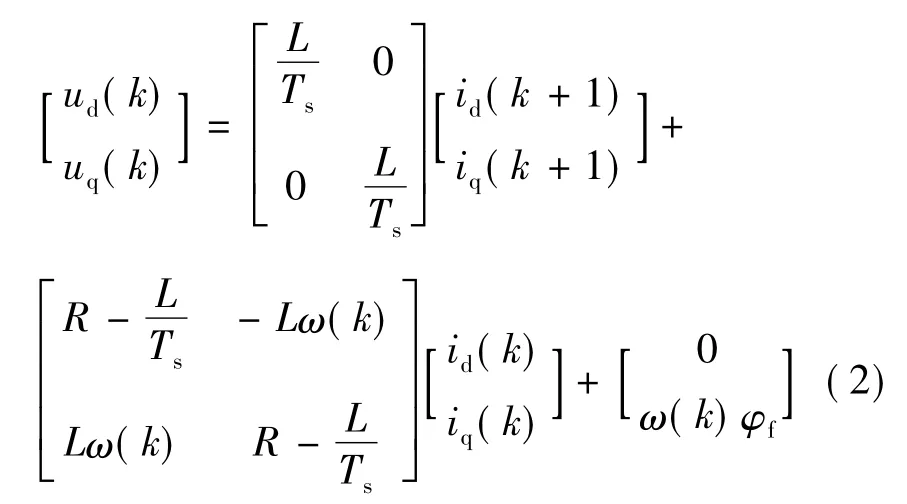
式中,id(k)和iq(k)分别为kTs时刻电机的d轴和q轴电流;ud(k)和uq(k)分别为kTs时刻电机的d轴和q轴电压;ω(k)为kTs时刻电机的电角速度;R为电机的定子电阻。
在同步旋转坐标系下,采用无差拍电流控制器的表贴式永磁同步电机的离散化数学模型为

式中,i*d(k+1)和i*q(k+1)分别为(k+1)Ts时刻的d轴和q轴电流参考值;u*d(k)和u*q(k)分别为依据(k+1)Ts时刻电流参考值确定的kTs时刻的d轴和q轴电压;R0、L0和φf0分别为无差拍电流控制器中电机定子电阻、定子电感和永磁体磁链的标称值。
3.2 低通滤波补偿环节
由于测量误差等原因,参数的标称值与实际值之间存在一定的偏差,使变流器的输出电流存在误差,其中高频电流误差分量可通过硬件电路来滤除。
为了消除输出电流的低频误差分量,在无差拍电流反馈回路中加入低通滤波器,将低通滤波器的输出作为电流的误差补偿,以q轴电流环为例,改进无差拍系统框图如图2所示。
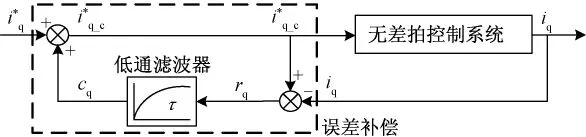
图2 q轴电流环改进无差拍系统框图Fig.2Q-axis of improved DCC system
图2中,i*q_c为补偿后q轴电流给定值,rq和cq分别为低通滤波器输入和输出,τ为低通滤波器时间常数。
图2对应的改进无差拍系统控制模型如图3所示。在图3中加入了采样开关S1,采样得到的信号是离散信号,因此需要加入零阶保持器,以使离散信号变为连续信号。
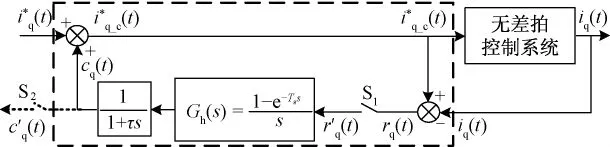
图3 q轴电流环改进无差拍系统控制模型Fig.3Q-axis of improved DCC model
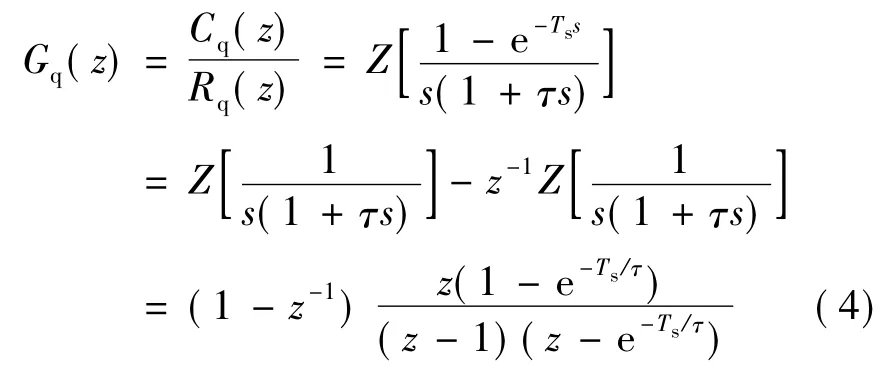
又因为

由式(4)和式(5)可得

图4为在弱磁过调制工况下,加入补偿环节之后的永磁同步电机无差拍控制系统。其中灰色阴影区域分别代表弱磁控制器、改进无差拍电流控制器和SVPWM过调制模块,虚线框内为误差补偿环节。
3.3 稳态误差分析


图4 PMSM改进无差拍控制系统框图Fig.4Block diagram of improved deadbeat control system
当采样时间Ts足够小时,TsΔR可近似忽略。稳态时,假设转速恒定,d轴电流恒定,可将N(k)= TsΔLω(k)id(k)+TsΔφfω(k)作为系统的扰动量,无差拍系统控制模型如图5所示。
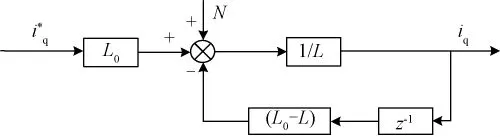
图5 q轴电流环无差拍控制模型Fig.5Q-axis current loop of deadbeat control
当模型参数匹配时,无差拍系统不存在稳态误差。但当参数不匹配时,单位阶跃扰动N0下无差拍系统误差为

在阶跃扰动作用下系统存在稳态误差。由式(7)和式(9),可知电机在扰动作用N=TsΔLωid+ TsΔφfω下的稳态误差为

由式(10)可知,电机永磁体产生的磁链和定子电感的测量误差影响系统的稳态误差。电机的永磁体磁链匹配度较高,并且在运行过程中变化也相对较小,因此扰动项TsΔφfω(k)对稳态误差的影响也不大;电机的定子电感虽然可以测量,但是当电机运行状态发生变化时,尤其是磁路饱和比较严重时,电感会发生一定程度的变化,并且随着弱磁程度的加深,d轴电流会变大,因此扰动项TsΔLω(k)id(k)是造成电机稳态误差的主要因素。
根据图5和式(6),补偿后的无差拍控制模型如图6所示。
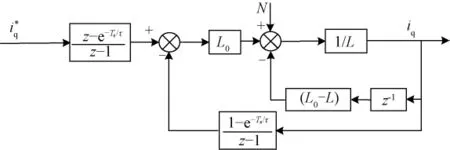
图6 q轴电流环改进无差拍控制模型Fig.6Q-axis current loop of improved deadbeat control
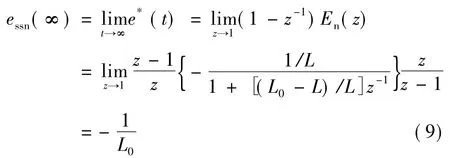
单位阶跃扰动下改进无差拍系统误差为
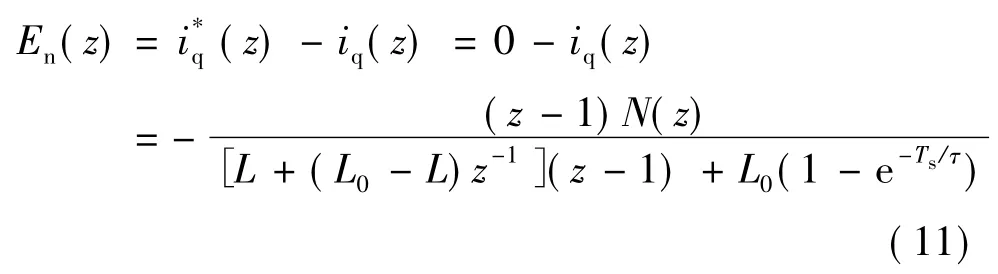
根据终值定理计算单位阶跃扰动下系统稳态误差为
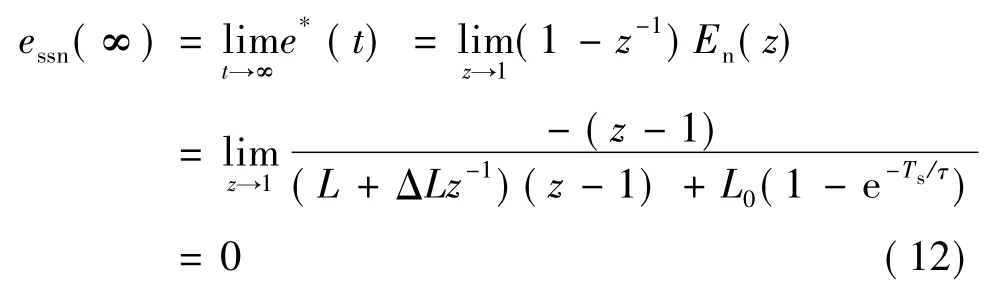
由式(12)可知,在单位阶跃扰动作用下改进无差拍系统的稳态误差为零,那么系统在扰动作用N下的稳态误差为零。当模型参数不匹配时,无差拍控制系统存在稳态误差,而改进无差拍系统能实现电流的无静差跟踪。
3.4 基速以上无差拍控制系统电流谐波抑制分析
下面分析改进无差拍控制器对电流谐波的抑制作用。根据图6可得改进无差拍控制系统的开环传递函数为

下面利用连续函数的对数频率法来设计调节器参数,首先进行双线性变换,即令则
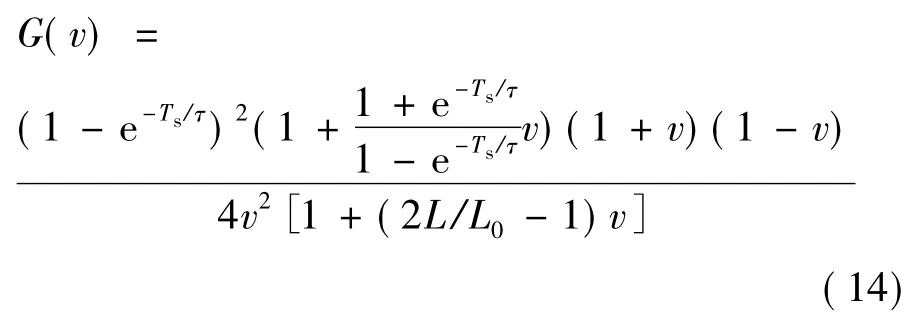
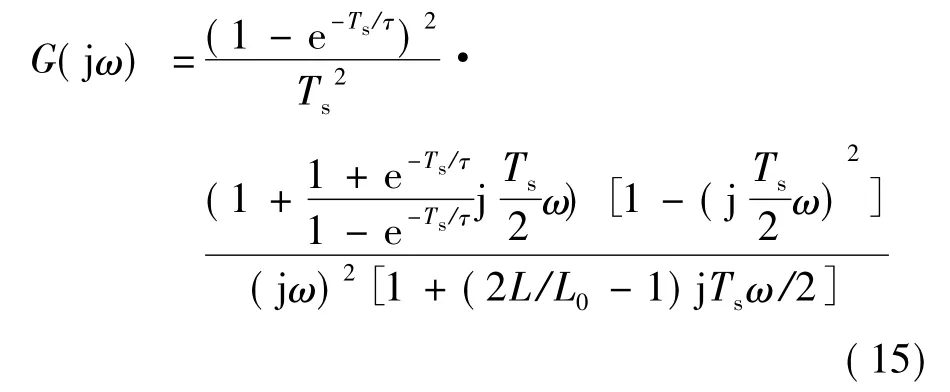
其中开环放大倍数为

对转折频率做近似简化,即
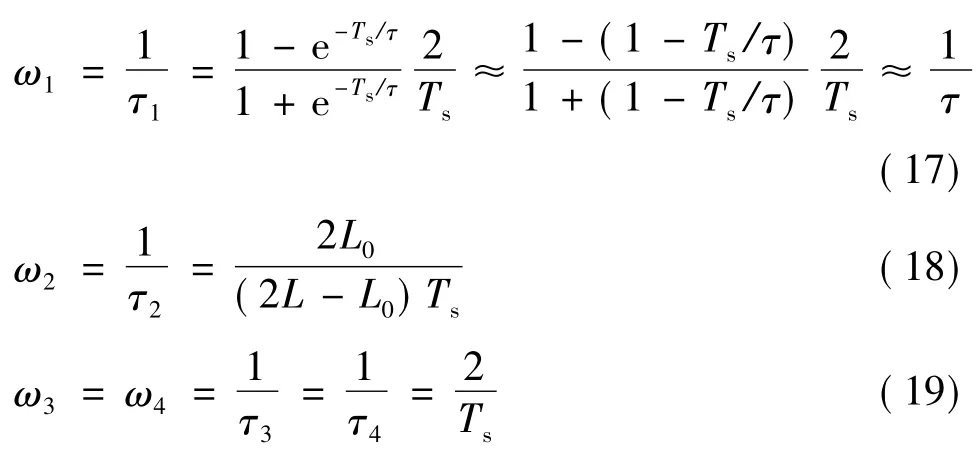
开环频率传递函数由两个积分环节、一个惯性环节和三个一阶微分环节组成。由于ω2、ω3、ω4比较接近,并且远大于ω1,因此对系统的频率特性影响不大,不妨假定ω2<ω3=ω4,改进无差拍控制系统的近似开环频率特性曲线如图7所示。
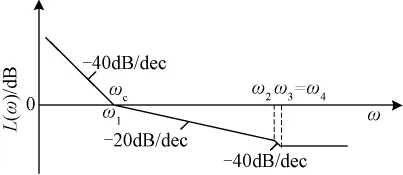
图7 近似开环频率特性曲线Fig.7Open-loop frequency characteristic curve
在近似频率特性曲线中,最左端直线的表达式为L(ω)=20lgK0-40lgω,从而可求得系统的截止频率为ωc=1/t。ωc增加,系统响应速度提高,但对高频谐波的衰减能力下降;ωc减小,系统响应速度降低,但对高频谐波的衰减能力提高。综合考虑这两个因素,可以通过调节参数τ的值来达到抑制高频谐波的目的。
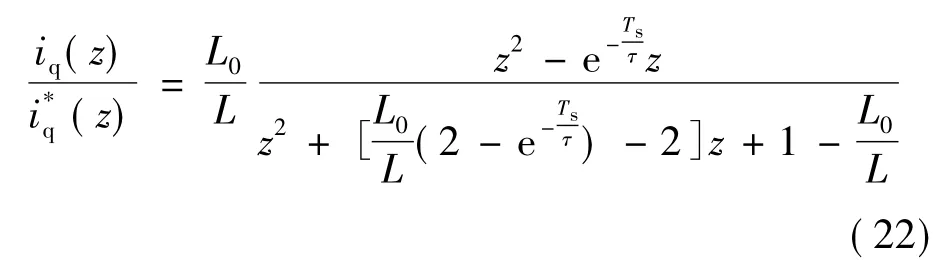
3.5 稳定性分析根据图5,无差拍控制系统传递函数为

离散系统特征方程的特征根全部在z平面的单位圆内,即所有特征根的模均小于1时,系统是稳定的。由此可求得无差拍系统的稳定范围为

由图6可求得改进型无差拍控制系统的传递函数为
改进无差拍系统闭环传递函数的特征方程为
依据朱利稳定判据对改进无差拍系统进行稳定性分析,根据式(23)构造朱利阵列,如表1所示。

表1 朱利阵列Tab.1July array
朱利稳定判据如下:

可得出参数不匹配时系统的稳定范围为

4 实验结果与分析
本文采用一台5.2kW永磁同步电机对PI控制策略和补偿后的无差拍电流控制策略进行实验对比研究。控制电路由浮点型TMS320F28335 DSP为主控芯片,以Cycone系列FPGA作协控制芯片。系统采样周期为100μs,开关频率为5kHz,实验电机参数如表2所示。
实验中给定直流母线电压为450V,根据式(1),基速以下时电机空载转速最高为63.4r/min,为保证电机运行于弱磁过调制区域,给定PMSM转速为70r/min,此时电机运行于过调制区域,负载转矩初始值给定为175N·m,0.5s时阶跃为330 N·m。根据前面对系统频率特性的分析,综合考虑系统的响应速度和对高频谐波的抑制效果,取系统的截止频率ωc=2πf=500rad/s,低通滤波器的参数τ= 0.002,此时无差拍系统能有效抑制过调制算法给系统带来的6次及其以上的谐波。
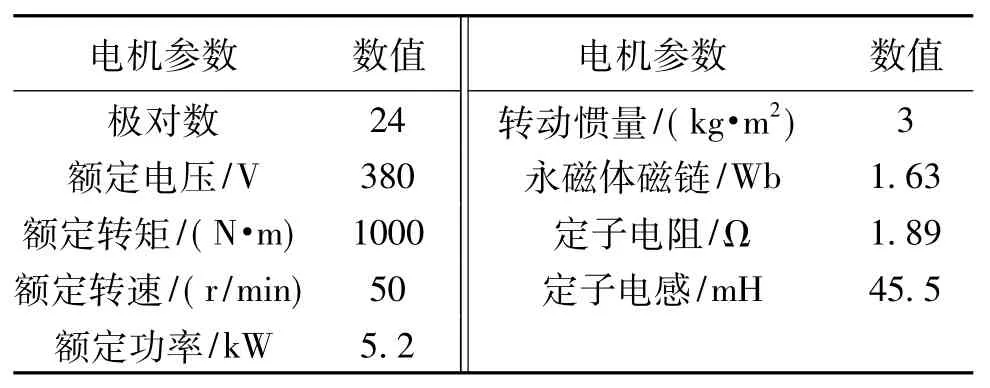
表2 电机参数Tab.2Parameters of tested motor
图8给出了PI控制策略和无差拍电流谐波抑制策略下的实验波形对比结果,从上至下依次为转速、d轴和q轴电流、转矩波形。
图9给出了PI控制策略和改进无差拍电流谐波抑制策略下的a相电流及其傅里叶分析结果。
由图中可以看出,采用PI电流控制时,a相定子电流中含有较大的5、7次谐波,负载突变前后相电流THD分别为3.75%和3.29%。采用无差拍电流谐波抑制策略后5、7次谐波均有减少,负载突变前后相电流THD分别为2.23%和1.39%。此外,由于谐波影响,PI电流控制下的电机转矩波动较大,负载突变前后转矩脉动峰-峰值为130 N·m和150 N·m。而采用无差拍电流谐波抑制策略后,转矩波动明显减少,负载突变前后转矩峰-峰值分别为80 N·m和110N·m。
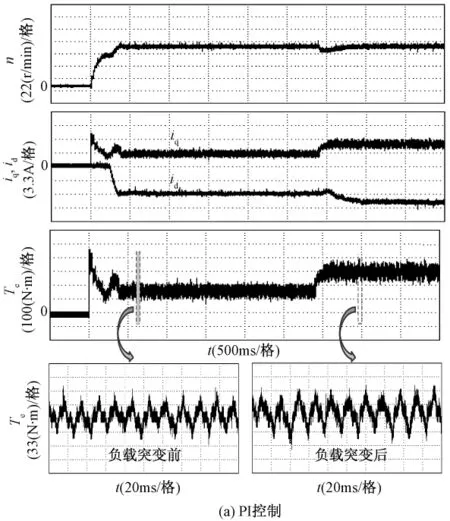
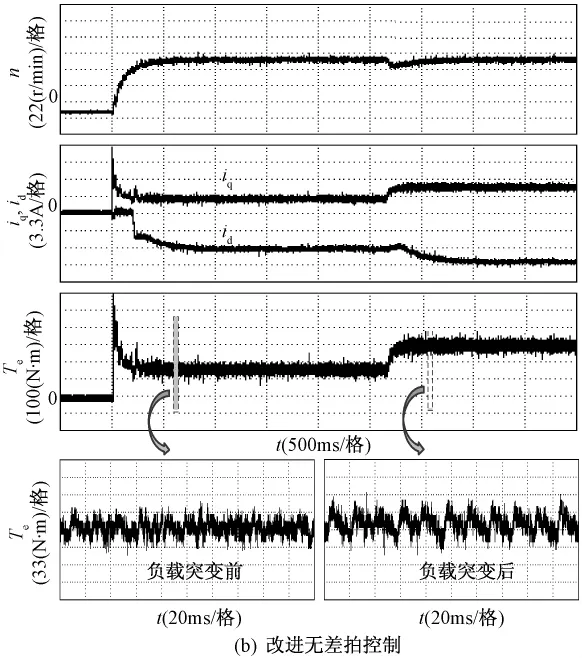
图8 不同电流控制策略下系统实验结果Fig.8Experiment results of different control strategies

图9 a相电流傅里叶分析结果Fig.9Current Fourier analysis results of phase a
5 结论
电流谐波含量高、转矩波动大是弱磁过调制运行的一个重要问题。本文将无差拍控制器应用于弱磁过调制工况下的永磁同步电机,解决了电机转矩波动大和电流谐波含量高的问题,同时对无差拍控制器做了改进,进行了误差补偿,消除了无差拍控制器在模型参数不匹配时存在的稳态误差。
[1]沈建新,陆媛,Andreas Gassner(Shen Jianxin,Lu Yuan,Andreas Gassner).永磁同步电机两相斩波式电流滞环控制(Hysteresis current control with twophase chopping for permanent magnet synchronous machines)[J].电工电能新技术(Advanced Technology of Electrical Engineering and Energy),2014,33(2): 35-38.
[2]张兴春,张幽彤,黄文卿(Zhang Xingchun,Zhang Youtong,Huang Wenqing).车用内置式永磁同步电机过调制弱磁算法(Research on over-modulation fluxweakening strategy of IPMSM in HEV application)[J].北京理工大学学报(Transactions of Beijing Institute of Technology),2013,33(9):925-928.
[3]Tripathi A,Khambadkone A M,Panda S K.Torque ripple analysis and dynamic performance of a space vector modulation based control method for AC-drives[J].IEEE Transactions on Power Electronics,2005,20(2): 485-492.
[4]Tae-Suk Kwon,Seung-Ki Sul.Novel antiwindup of current regulator of a surface-mounted permanent magnet motor for flux-weakening control[J].IEEE Transactions on Industry Applications,2006,52(5):1293-1300.
[5]何凤有,王从刚,曹晓冬,等(He Fengyou,Wang Conggang,Cao Xiaodong,et al.).感应电机准无差拍模型预测电流控制策略(Quasis-deadbeat model predictive current control strategy for introduction motor drives)[J].电机与控制学报(Electric Machines and Control),2013,17(9):57-62.
[6]Wipasuramonton P,Zhu Z Q,Howe D.Predictive current control with current-error correction for PM brushless AC drives[J].IEEE Transactions on Industry Applications,2006,42(4):1071-1079.
(,cont.on p.31)(,cont.from p.6)
Improved deadbeat predictive current control strategy of permanent magnet synchronous motors
FENG Jing-huan,XIA Chang-liang,WANG He-chao,YAN Yan
(School of Electrical Engineering and Automation,Tianjin University,Tianjin 300072,China)
This paper presents an improved DCC(deadbeat current control)method for PMSM(permanent magnet synchronous motors)in over-modulation range.The proposed method can effectively reduce current harmonics and the torque ripple in the flux-weakening over-modulation region.A low pass filter is added in the feedback loop of the deadbeat current controller,and its output can be seen as the compensation of current error.The steady-state errors of the traditional and the improved deadbeat control system with the model parameters inaccuracies are analyzed respectively in this paper.The improved deadbeat current control system can track the reference current without static error.The mechanism of the current harmonics rejection of the improved deadbeat control algorithm is studied in over-modulation region.At last,the stability of the improved deadbeat control system is proved.The experiments with a 5.2kW prototype of permanent magnet synchronous motor are carried out.The results show that the proposed strategy can effectively suppress current harmonics and torque ripple.
permanent magnet synchronous motor;deadbeat control;over-modulation;flux-weakening;current harmonics
TM315
A
1003-3076(2015)08-0001-06
2014-10-20
国家重点基础研究发展计划(973)资助项目(2013CB035602)
冯景欢(1989-),女,河北籍,硕士研究生,主要从事电机系统及其控制的研究;夏长亮(1968-),男,天津籍,教授,博士,主要从事电机系统及其控制的研究。
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
上海大中型电机(2021年2期)2021-07-21
煤气与热力(2021年4期)2021-06-09
防爆电机(2020年6期)2020-12-14
中华戏曲(2020年1期)2020-02-12
光学精密工程(2016年3期)2016-11-07
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28