基于步进搜索的敏捷同轨立体成像规划
2015-06-24 14:42田原王密
无线电工程 2015年11期
田原,王密
(武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉 430079)`
基于步进搜索的敏捷同轨立体成像规划
田原,王密
(武汉大学 测绘遥感信息工程国家重点实验室,湖北 武汉 430079)`
针对敏捷光学卫星的同轨立体成像模式,从立体像对成像质量的角度出发,提出了一种基于步进搜索策略的成像规划方法。建立了同轨立体成像评价模型,采用步进搜索策略,遍历计算全部可行的前后视影像成像时间窗口,选取成像评价指标最佳的时间窗口作为最优规划结果。实现所提出算法并通过仿真实验验证,分析了选取不同的成像时间窗口对立体成像质量的影响,仿真结果表明算法具有可行性。
敏捷卫星;同轨立体;最优成像规划;步进搜索
0 引言
姿态敏捷控制可极大地提高卫星使用灵活性和观测效率,快速高效地获取所需的非星下点目标遥感数据,是当今世界商业遥感卫星的一个发展方向[1]。美国Ikonos卫星、QuickBird卫星、GeoEye-1卫星和WorldView-1/2卫星等商业遥感卫星具备姿态敏捷能力,另外,法国的Pleiades卫星和印度的Cartosat-2卫星也具备了这种姿态敏捷控制能力[2-6]。
随着遥感数据应用的快速发展,获取地面目标的三维信息成为一种新的市场需求。一般情况下,专用的立体测绘卫星需要安装不同指向的2台相机或3台相机来完成立体观测任务。随着空间分辨率的进一步提高,立体测绘相机的尺寸急剧增大,卫星平台的承载能力受到了极大挑战。安装单台相机的遥感卫星利用敏捷控制技术可实现俯仰轴的快速姿态机动,短时间内实现对同一地物的不同角度观测,形成立体像对,以满足立体观测需求。敏捷卫星的同轨立体成像工作模式极大地解决了安装多台相机导致遥感卫星承载能力过大的问题,并且降低了卫星的经济成本和研制难度[7]。
敏捷卫星获取目标区域的同轨立体像对有多种观测模式,本文从立体成像质量最优的角度出发,找到一种最优的获取模式使得同轨立体像对间几何分辨率差异最小、基高比最优,从而为后续的处理提供最优化的原始数据。
1 同轨立体成像模式评价指标
本文对于同轨立体成像模式的最优评价基于以下准则:首先,该成像模式应能使同轨立体像对的基高比为最优基高比;在此基础上,寻找同轨立体像对之间几何分辨率差异最优的成像模式。
前视条带和后视条带在推扫成像过程中,3个姿态角保持恒定,不考虑地形起伏的情况下,可认为各条带影像的几何分辨率保持一致,则由成像比例尺式(1)分别获取前视条带影像的几何分辨率Sf和后视条带影像的几何分辨率Sb。

式中,f为主距;(X0,Y0,Z0)为像主点对应的物方点在地心坐标系下的坐标;(Xo,Yo,Zo)为像主点在地心坐标系下的坐标。
基高比是影响立体成像模型高程精度的重要因素,当基高比趋近于1时,模型高程精度最优[8],

式中,H为卫星平均航高;B为基线长。
综合考虑基高比和几何分辨率差异的影响,即模型基高比趋近于1且前后视影像几何分辨率差异[9]最小,建立同轨立体规划模式评价指标如式(3),指标越小则成像质量越优。

式中,WJG和WS分别为基高比和几何分辨率差异在评价指标中所占的权重。
2 成像目标区域再生成
通常,给定的原始目标区域并不平行于卫星的星下点轨迹,对这样的原始目标区域进行规划是很复杂的,因此必须进行目标区域的重新确定,生成平行于卫星星下点轨迹且最小覆盖原始目标区域的规则成像条带区域,同时得到条带起始中心点坐标和结束中心点坐标。
2.1 卫星星下点轨迹拟合
卫星的星下点(Li,Bi)(i=1,2……,N)轨迹近似一条直线,则待拟合的星下点轨迹直线为:

式中,a,b为待拟合直线参数。
初始给定每个轨迹点等权,运用最小二乘法解求待拟合星下点轨迹直线方程,即解求式(5):

将每个待拟合的星下点坐标代入用式(5)解求的直线方程式(4),计算该点与拟合的直线的距离的平方,重新确定每个待拟合的星下轨迹点的权。以新权再次进行最小二乘直线拟合,得到新的星下点轨迹拟合直线,迭代完成求解。
2.2 生成规则成像条带区域
计算原始目标区域的各个角点(Li,Bi)距离卫星星下点轨迹所拟合的直线方程式(4)的垂直距离,找到其中最小和最大的2个点。用这2个点分别解求过其并平行于卫星星下点轨迹拟合直线方程式(4)的新的矩形目标区域的2条边:

再求得垂直于卫星星下点轨迹所拟合的直线,同理找到其中最小和最大的2个点并得到新矩形目标区域的2条边:

分别解求l1和l3、l1和l4、l2和l3、l2和l4的交点(P13,P14,P23,P24),即为新的矩形目标区域的4个角点,P13和P23的中点、P14和P24的中点分别为规则成像条带的起始中心点和结束中心点。
3 同轨立体成像规划算法
卫星成像规划的过程,是在卫星平台运行限制条件下,求解卫星成像参数并使规划目标评价函数获取最优解。在上述建立的成像模式评价指标及确定了规则的条带成像区域的基础上,采用一种步进搜索[10]的策略,遍历在敏捷卫星平台最大摆动圆锥角的限制下全部可行的前后视成像模式,如图1所示。给定目标条带区域的起始中心点和结束中心点,可得到在平台最大摆动圆锥角限制下的前视条带最早成像时刻TF0与后视条带最晚成像时刻TBE;设定前视条带起始成像时刻为TFS,前视条带结束成像时刻为TFE,卫星姿态调整时间为t,步进搜索时间间隔为dT。
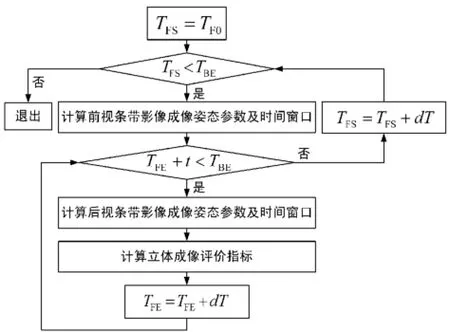
图1 同轨立体成像最优成像模式搜索策略
首先以前视条带最早成像时刻为搜索起点,从TF0时刻起进行前视成像,计算其成像姿态参数及成像时间窗口,得到前视成像结束时间TFE;之后以TFE+t作为后视成像的起始时刻,计算后视成像姿态参数及时间窗口,并对该前后视成像模式进行评价;在后视成像起始时刻上添加步进值dT,循环计算各时刻下后视成像的各项参数及评价指标直至不可成像;在前视成像起始时刻TFS上添加步进值dT,循环上述步骤;对全部可行的前后视影像获取模式完成遍历后,选取具有最佳评价指标的成像模式作为最优规划结果。
3.1 卫星外方位元素拟合
卫星实际运行轨道由于受到多种非地球中心引力的影响而偏离开普勒轨道,这些非地球中心引力被称为摄动力,主要摄动力均连续作用于遥感卫星上。因此,通常情况下遥感卫星轨道是一个平稳运行的轨道。
考虑到卫星轨道运行的平稳性,在一个短时段内,可用多项式来描述遥感卫星的运行轨道[11],从而避开复杂的卫星受力分析。采用多项式回归分析来对卫星轨道数据建模,任意时刻的轨道数据都可以通过多项式模型内插获得[12]。
3.2 条带成像姿态参数计算
传感器的姿态参数通常表示本体坐标系和轨道坐标系的姿态关系,在不考虑安装角的情况下,传感器的姿态参数即为传感器坐标系和轨道坐标系之间的三姿态角(pitch,roll,yaw)。由于已知当前模式下某条带影像起始时间,用卫星轨道拟合多项式内插得到其投影中心在地心坐标系下的坐标(Xo,Yo,Zo)。该条带起始点在地心坐标系下的坐标(X0,Y0,Z0)通过大地坐标转换成地心坐标得到。很显然,条带影像起始点和像主点以及投影中心满足共线方程[13]:

式中,RCG为传感器坐标系到轨道坐标系的旋转矩阵;RGF为轨道坐标系到地固坐标系的旋转矩阵。
园博会与城市发展、百姓生活的关系越来越密切。从园博会的规划设计、运营管理到会后利用不仅要体现地方文化特色、会后利用,更要贴近百姓生活,使市民和游客充分享受到绿色美好生活,才能充分发挥园博会的综合效益。
由内插所得卫星在地固坐标系内的位置(XS,YS,ZS)和速度(XvS,YvS,ZvS),则求得轨道坐标系与地固坐标系之间的转换关系为:
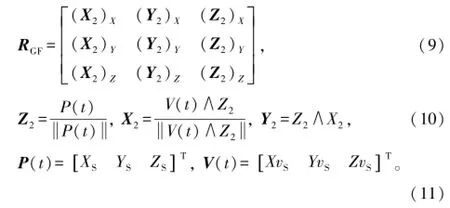
由于RGF为空间两标准正交基的转换矩阵,故其为一正交矩阵,故

主光轴向量在轨道坐标系下的坐标解求后,可解求其俯仰角和滚动角为:

3.3 成像时间窗口计算
当前后视条带影像起始成像时刻确定时,成像持续时间T可由条带长度S及卫星运行速度V求得:

从而得到相应的条带成像结束时刻。
敏捷卫星姿态的调整过程并非匀角速度的姿态变化过程,其存在角加速度及姿态稳定过程的影响。通常描述敏捷卫星姿态机动能力的方法为给出一组机动一定角度所需要的调整时间,例如5 m机动5°、10 m机动10°、15 m机动20°。当姿态调整的角度在0°到一定小范围内时,由于姿态稳定过程的影响认为其所需机动时间基本固定,之后随着角速度的变大,每进一步调整特定角度所需的机动时间依次变短,则机动时间参数模型如图2所示。

图2 敏捷卫星姿态机动参数描述
计算姿态调整时间时,首先设定姿态调整时间t为最小值,以TFE+t为后视成像起始时刻计算后视条带成像姿态参数,与前视条带成像姿态参数相比求得姿态摆动角Δφ;然后将Δφ代入如图2描述的姿态机动时间模型,求得实际所需姿态调整时间t2,若t2<t,则确定姿态调整时间为t,否则令t=t+Δ,重复上述步骤。为防止设计姿态机动能力较弱使姿态调整时间计算不收敛,加入TFE+t<TBE的限制。
4 实验结果分析
基于提出的同轨立体成像规划算法,本文在C语言环境进行了实现,并以仿真数据进行了验证。输入参数包括:目标成像区域的各个角点经纬度坐标、卫星轨道星历数据、敏捷卫星平台参数及敏捷姿态机动时间参数;规划结果包括:最优成像模式下前后视条带影像的成像姿态参数、时间窗口、几何分辨率、基高比和成像模式评价指标。实验输入敏捷卫平台参数如表1所示,目标规划区域位于北京地区,沿卫星推扫方向长约60 km,垂直卫星推扫方向宽约15 km。

表1 敏捷卫星平台参数
规划结果如表2所示(表中所列时刻是以输入卫星轨道星历数据首历元时刻为基准的相对时间)。
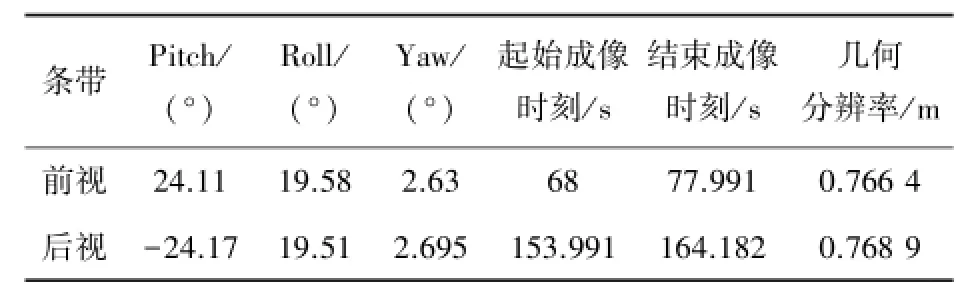
表2 同轨立体成像规划结果
规划结果中,所得最优成像模式下立体成像基高比为1.011,可获取较高的立体量测高程精度,且前后视条带影像的几何分辨率差异较小。
分析上述实验中,选取不同的成像时间窗口对立体成像质量的影响,图3、图4和图5显示了在全部可行的立体像对获取模式下,不同的前后视起始成像时刻对基高比、几何分辨率差异及本文建立的质量评价指标的影响。

图3 不同窗口下的基高比
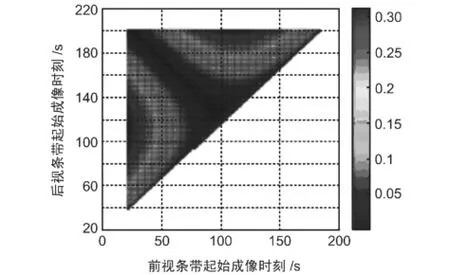
图4 不同窗口下的几何分辨率差异
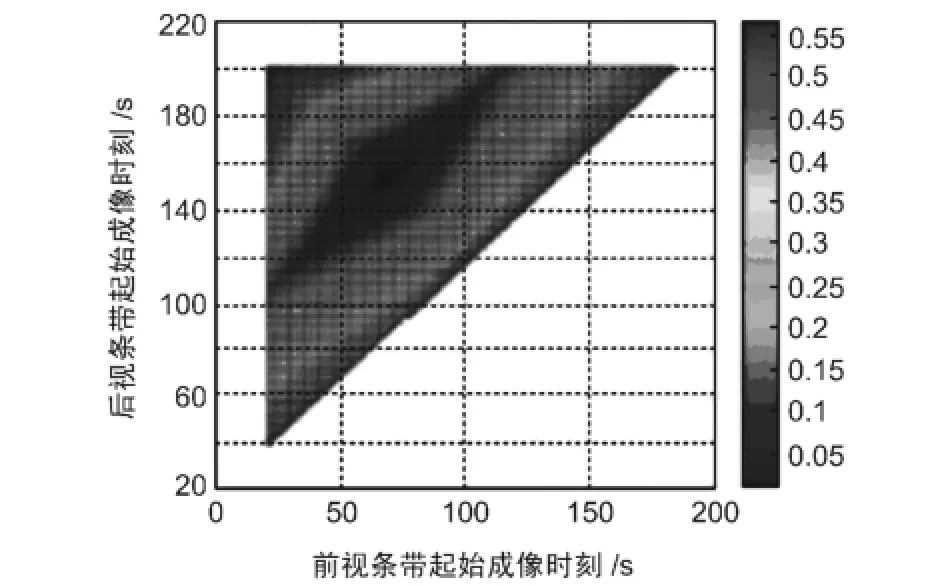
图5 不同窗口下的质量评价指标
不同的立体像对获取模式下,基高比越接近1立体量测精度越高,几何分辨率差异越小质量越好,则在图3中所示基高比最接近1的区域(浅色带状区域)和图4中几何分辨率差异指标最小值区域(深色带状区域)的交集区域可获取最优成像模式,该区域与本文所建立的质量评价指标搜索出的最佳区域(图5中所示深色区域)一致。可直观看出,本实验规划结果同时具有最佳基高比与最小几何分辨率差异的优点,且在各可行的立体成像模式中最优。
5 结束语
敏捷型遥感卫星是当今遥感卫星的一个重要发展方向,利用姿态敏捷能力可以制定灵活多变的工作模式,满足国土资源调查、地质勘探、城市规划、国土测绘、防灾减灾和军事侦察等多个领域的需求,极大地提高了卫星使用灵活性和观测效率。本文针对敏捷卫星的同轨立体观测模式,由成像质量评价的角度出发,提出了一种同轨立体成像最优规划方法,并由实验定量分析,体现其规划结果对立体成像质量的提高,证明该算法的可用性。因此,本文可以对敏捷卫星成像资源的合理优化利用提供技术支撑和参考。
[1]LEMAITRE M,VERFAILLIE G,JOUHAUD F.Selecting and Scheduling Observations of Agile Satellites[J].Aero-space Science and Technology,2002,6(5):367-381.
[2]韩昌元.近代高分辨地球成像商业卫星[J].中国光学与应用光学,2010,3(3):201-208.
[3]杨秉新.美国IKONOS和QuickBird-2卫星相机的主要性能和特点分析及看法[J].航天返回与遥感,2002,23(4):14-16.
[4]郭今昌.商用高分辨率光学遥感卫星及平台技术分析[J].航天器工程,2009,18(2):83-89.
[5]SCHAAP N.IKONOS:Future and Present[J].SPIE,2003,4881:660-668.
[6]RYE G D,COX S M.Orbview 2,3 and 4[J].SPIE,1999,3870:674-675.
[7]张新伟.敏捷遥感卫星工作模式研究[J].航天器工程,2011,20(4):32-38.
[8]HIROYUKI H.Dem Accuracy and the Base to Height(B/H)Ratio of Steteo Images[C]∥International Archives of Photogrammetry and Remote Sensing,2000,XXXIII-B4: 356-359.
[9]YANG B.An Optimal Imaging-scheduling Algorithm for the Multi-strip Imaging-mode of the High-resolution Agile Satellites Based on Certain Step-size Search[C]∥Inter-national Archives of the Photogrammetry,Remote Sensing and SpatialInformationSciences,2012,XXXIX-B1:339-343.
[10]SCHUMERS MA,STEIGLITZK.AdaptiveStepsize Random Search[J].IEEE Transactions on Automatic Con-trol,1968,13(3):270-276.
[11]张 过.缺少控制点的高分辨率卫星遥感影像几何纠正[D].武汉:武汉大学,2005.
[12]程春泉,邓喀中.长条带卫星线阵影像区域网平差研究[J].测绘学报,2010,39(2):162-168.
[13]张剑清,潘 励.摄影测量学[M].武汉:武汉大学出版社,2003.
An Optimal Imaging-scheduling Algorithm for Stereo Acquisition Mode of Agile Satellites Based on Step-Size Search
TIAN Yuan,WANG Mi
(The State Key Laboratory of Information Engineering in Surveying,Mapping and Remote Sensing,Wuhan University,Wuhan Hubei 430079,China)
Aimed at the stereo acquisition imaging-mode of the agile satellite,from the perspective of the quality of stereo pair,an imaging-scheduling algorithm based on certain step-size search is proposed.First,the evaluation model of stereo acquisition quality is built.Then traversing all the available imaging time-windows of front view and back view strip based on step-size search method is performed,and the imaging pattern with the best evaluation resultis selected.The algorithm proposed is tested by simulation data,and the effect on stereo pair image quality of different imaging time-windows is analyzed.The results show that this algorithm is feasible.
agile satellite;stereo acquisition mode;optimal imaging scheduling;step-size search
V474.2
A
1003-3106(2015)11-0044-04
10.3969/j.issn.1003-3106.2015.11.12
田 原,王 密.基于步进搜索的敏捷同轨立体成像规划[J].无线电工程,2015,45(11):44-47,51.
田 原男,(1989—),博士研究生。主要研究方向:航天摄影测量。
2015-08-11
王 密男,(1974—),教授。主要研究方向:高分辨率遥感、测绘卫星地面数据处理。
猜你喜欢
小哥白尼(趣味科学)(2020年3期)2020-07-27
数学物理学报(2019年3期)2019-07-23
山西地震(2019年1期)2019-03-20
西安交通大学学报(2019年3期)2019-03-08
家庭影院技术(2018年9期)2018-11-02
军营文化天地(2018年2期)2018-04-20
制造技术与机床(2017年7期)2018-01-19
自动化学报(2017年5期)2017-05-14
小学生时代·大嘴英语(2017年1期)2017-03-20
系统工程与电子技术(2016年2期)2016-04-16