
浅谈假人传感器的方向规律
2015-08-02 07:03张秋华
西安文理学院学报(自然科学版) 2015年1期
张秋华
(芜湖职业技术学院汽车工程学院,安徽芜湖241000)
浅谈假人传感器的方向规律
张秋华
(芜湖职业技术学院汽车工程学院,安徽芜湖241000)
在汽车碰撞试验数据中,有时会出现一些异常的反向曲线,这可能是传感器的安装问题,也有可能是数据采集软件没有按规定设置传感器方向,而种种这些最终都会对车辆以及假人安全的判断产生干扰,以H3-50TH正碰男性假人为例谈谈加速度传感器、位移传感器、力传感器的方向设定规律.
加速度传感器;位移传感器;方向规律;正向
1 加速度传感器方向规律
在假人家族当中,不管是正碰假人、侧碰假人、后碰假人还是儿童假人都会安装加速度传感器,下面以H3-50TH正碰男性假人为例浅谈一下加速度传感器的方向规律.H3-50TH的男性假人会在头部、胸部以及盆骨位置加装三轴向的加速度传感器[3].本试验使用的加速度传感器类型是Endevco 7264C-2000,该传感器的重心在传感器芯片伸出的圆形凸台,它不同于Endevco 7264A和Endevco 7264B[4].具体如图2和图3所示,凸台为传感器重心点.
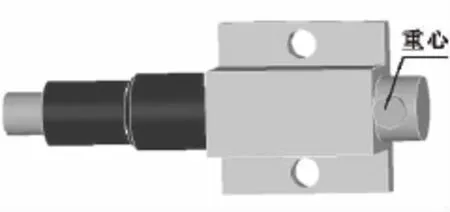
图2 Endevco7264c重心示意图

图3 Endevco7264B、7264A重心示意图
1.1 假人头部
假人头部加速度传感器的安装要求头部重心与三轴向传感器的重心重合,所以假人公司会结合各个碰撞试验室使用的加速度传感器的型号配备不同的安装块,安装块上会有两个安装螺纹通孔用于固定,其三个不同面(XYZ)会有加速度传感器安装螺纹孔,具体的示意图如图4所示.
由于设计空间和安装的限制,假人头部三个加速度传感器的方向不能完全按SAE-J211-1的规定,为此在假人总图里规定了头部加速度传感器的安装方向,头部加速度安装方法如图5所示.与SAE-J211-1相比,头部加速度X为负向,Y为负向,Z为负向.知道这个规律后,就可以直接在数据采集的软件里将头部三轴向的加速度传感器方向全部调整为负向即可.
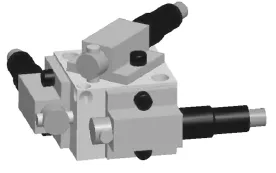
图4 加速度传感器安装块结构示意图

图5 假人头部三轴向加速度传感器安装示意图
1.2 假人胸部
假人胸部三轴向的加速度传感器安装示意图如图6所示.由安装结构不难发现,不论怎样调整,Y向的加速度传感器方向是固定的,为负向.同头部加速度不一样的是,胸部三轴向的加速度传感器的重心要求与假人胸部的重心位置不重合,只是靠近.在假人总图里也规定了胸部加速度传感器的安装方向如图6所示,与SAE-J211-1相比胸部加速度Y和Z均为负向.
1.3 假人盆骨
在假人总图里也规定了骨盆加速度传感器的安装方向如图7所示.首先由于安装结构的限定,X向的加速度方向是唯一的,为负向.从传感器布线以及三轴向加速度传感器重心靠近假人盆骨重心的角度来考虑,按照图7的示意图来布置传感器是最简单方便的,所以与SAE-J211-1相比盆骨加速度Y/Z都为负向.为了确保每次试验采集的加速度是同一个点,所以要求传感器一旦安装即不要随意变动或者更换位置.表1是H3-50TH正碰男性假人的加速度传感器方向规律表,知道了这些规律后并且按照假人安装说明要求来安装传感器,就可以根据表1直接在数据采集软件内进行加速度传感器方向的设置.

图6 假人胸部三轴向加速度传感器安装示意图
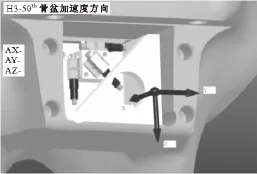
图7 假人盆骨三轴向加速度传感器安装示意图

表1 H3-50TH加速度传感器方向
2 位移传感器方向规律
还是以H3-50TH男性假人为例,浅谈一下位移传感器方向的规律.H3-50TH正碰男性假人会在胸部和膝盖位置安装位移传感器,在C-NCAP 2012版的全正碰试验中,这两项分别占了5分值和2分值,而在偏置碰撞试验中,这两项也都分别占了4分值,所以这两个位移传感器的方向设定尤为重要,一旦弄错就会很大程度上影响到车辆的星级评判[5].
2.1 胸部位移传感器
图8是胸部位移传感器的安装示意图,由于安装结构的限定,胸部位移传感器安装位置也是唯一的,只要安装上方向就确定了.实际胸部位移传感器是一个角度传感器,在标定的过程中将角度的变化转换成连接拉杆位移的变化,通过位移与电压的关系换算出灵敏度,最终通过灵敏度换算在数据采集终端读出假人实际的压缩位移量[6].SAE J211-1-2007规定当假人胸骨受到压缩力的时候位移应该是负值,在实际试验中位移传感器当受到压缩力的时候,实际反馈的是正向值,所以需要在数据采集软件内将胸部位移传感器方向调整为负向.
2.2 膝部位移传感器
图9和图10分别是膝部位移传感器和安装示意图,由于膝部位移传感器的安装也同样受到一些安装螺纹孔的限定,所以安装的方向是唯一的.

图8 假人胸部位移传感器安装示意图

图9 膝部位移传感器

图10 膝部位移传感器安装示意图
在实际试验中使用的膝部位移传感器是Firstmark Controls厂家的,而该膝部位移传感器出厂设置的方向是有差异的,有些拉出为正值,而有些拉出为负值,所以没有规律可寻.在安装前需要实时检测传感器出厂设置方向,拉出一段距离查看实时曲线方向的变化,根据检测结果最终再在数据采集软件内对方向进行设置.SAE J211-1-2007规定当膝部受到压缩力时,最终的方向应该是负向的变化.
3 大腿力传感器方向规律
H3-50TH正碰男性假人会在左右大腿分别安装两个单轴向力传感器,安装示意图如图11所示.在假人大腿内侧会有一个传感器线束的诱导槽,所以该力传感器的安装相对也是固定的,方向也是固定的.SAE J211-1-2007规定当大腿受到压缩力的时候应该为负向值,而实际力传感器按照图11的示意安装在假人大腿内则反馈的压缩力就是负值,所以在数据采集软件内将该大腿力设置为正向即可.
4 小腿力传感器方向规律

图11 大腿力传感器安装示意图
H3-50TH正碰男性假人的左右小腿会分别安装两个四轴向的力传感器,分别用来测量Fx、Fz、Mx、My,安装示意图如图12所示.由于安装空间、定位销以及线束诱导槽的局限,该四轴向的力传感器安装位置也是固定的.结合SAE J211-1-2007规定,小腿四分力的方向都为正向,在数据采集软件内将所有的方向设置为正向即可.
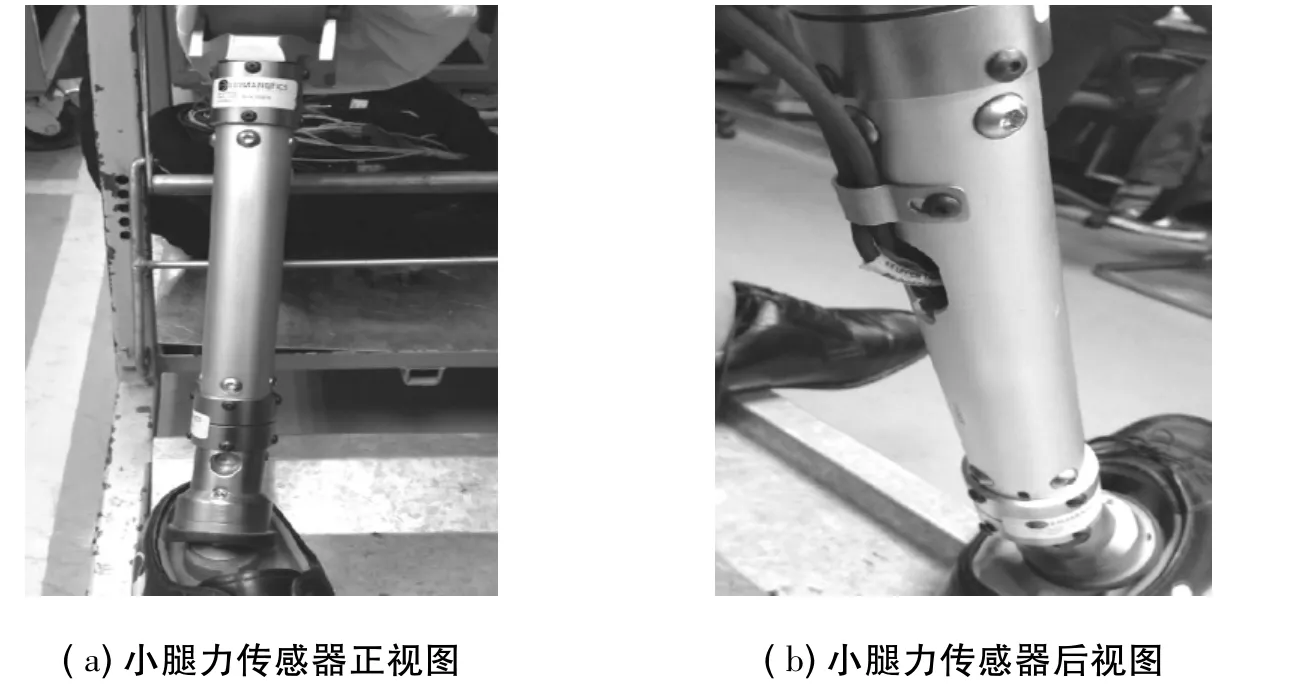
图12 小腿力传感器安装示意图
5 标准曲线模板
以正面100%重叠刚性壁障碰撞试验为例,H3-50TH正碰男性假人的传感器经过上述的调整后,试验后标准的碰撞曲线模板如图13所示.由于车辆的结构以及相关安全辅件的配置不一致,曲线没有完全的一致性,所以列举以上比较典型的曲线趋势方向供参考.具体曲线的细节还需要结合车辆以及假人的运动来进行深入分析.
6 结语
结合各个假人传感器的安装要求以及一些安装配件夹具的结构,同时了解各类型传感器的工作特性就不难发现传感器方向上的一些规律,不仅仅是H3-50TH,其他类型的假人也有方法和规律可寻.本文作为一个引子,希望相关工程师可以正视假人传感器方向的设置,尽量避免错误信号,提升采集数据的质量.
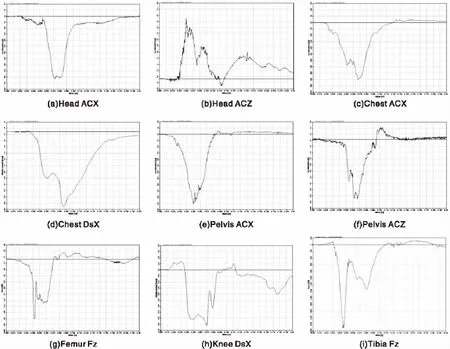
图13 正面100%重叠刚性壁障碰撞试验前排假人曲线模板
[1] 周新良.汽车碰撞试验用假人多轴力传感器的校准技术研究[J].北京汽车,2009(6):31-33,36.
[2] SAE J211-1-2007.冲击测试设备仪器Instrumentation for Impact Test—Part1—Electronic Instrumentation[S].美国汽车工程师协会,2007.
[3] 混合Ⅲ50百分位男性假人用户手册User'smanual for the 50thpercentilemale hybrid III test dummy[S].美国第一技术安全系统公司(FTSS),1998.
[4] 加速度计用户手册User'smanual for Endevco accelerometer[S].美国恩德福克公司(Endevco),2005.
[5] C-NCAP管理规则[S].中国汽车技术研究中心,2012.
[6] 赵敬月,徐坚杰,陈杰.HybridⅢ50~(th)假人胸部位移传感器的应用[J].上海计量测试,2014(2):42-44,58.
[责任编辑 王新奇]
On the M ovement of Crash Test Dumm y Sensor
ZHANG Qiu-hua
(School of Vehicle Engineering,Wuhu Vocational Technology College,Wuhu 241000,China)
Car crash test data have shown that theremay occur some abnormal reverse curves. The causemay lie in the sensor installation or the inappropriate installation of sensor direction of data acquisition software.These factorsmay lead to the misjudgment of vehicle and dummy safety performance.With the H3-50THhead-on collision male dummy as an example,this study addresses themovement setting of the accelerometer,displacement sensor,and force sensor.
accelerometer;displacement sensor;movement;positive
1008-5564(2015)01-0051-05
U467.1+4
A
在汽车碰撞安全试验中,会根据不同的试验类型在车辆内安放假人,为了对整车安全以及星级进行评价,会在假人的不同位置加装加速度、位移、力等传感器[1].而试验前工程师会在数据采集软件内部根据SAEJ211标准并结合假人实际安装方向对传感器的方向进行设置,以便获取到正确的传感器曲线.本文结合试验室内的假人以及传感器的使用和安装进行方向规律探究,为汽车整车性能试验提供参考和依据.
美国SAE J211-1-2007对假人的不同姿态以及坐标系有明确的规定:正向的X是指从假人的后面指向假人前面(PA),正向的Y是指从假人左侧指向假人右侧(L-R),正向的Z是指从假人的上端指向假人的下端即由头指向假人的脚(SI)[2].具体的方向如图1所示.
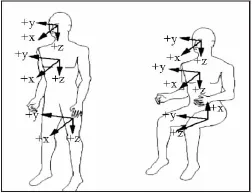
图1 假人不同坐姿的坐标系
2014-10-22
张秋华(1977—),女,安徽绩溪人,芜湖职业技术学院汽车工程学院讲师,硕士,主要从事汽车传感器理论研究.
猜你喜欢
昆明医科大学学报(2021年10期)2021-12-02
昆明医科大学学报(2021年3期)2021-07-22
数学小灵通(1-2年级)(2020年9期)2020-10-27
数学大王·低年级(2020年4期)2020-04-20
时代汽车(2020年23期)2020-03-03
当代贵州(2019年41期)2019-12-13
经理人(2019年12期)2019-09-10
汽车技术(2017年7期)2017-08-08
汽车工程学报(2016年6期)2017-01-11
中国共青团(2015年7期)2015-12-17
