
乌东德水电站双向门机大车同步与定位控制技术
2015-10-30 07:20覃建青王孝鲁
制造业自动化 2015年10期
覃建青,王孝鲁
(中国葛洲坝集团 机械船舶有限公司,宜昌 440007)
1 项目背景
乌东德水电站坝址所处河段的右岸隶属云南省禄劝县,左岸隶属四川省会东县。乌东德水电站开发任务以发电为主,兼顾防洪;电站建成后可发展库区航运,具有改善下游河段通航条件和拦沙等作用。水库正常蓄水位975.0m,设计洪水位979.38m,校核洪水位986.17m,水库总库容74.08亿m3,电站装机容量10200MW。两岸靠河侧各布置6台单机容量为850MW的机组,电站厂房采用左、右岸各布置6台机组的首(中)部式地下厂房。
发电机组引水系统采用单机单洞,左岸布置2条低导流洞,右岸布置2条低导流洞,4条低导流隧洞的出口和电站尾水洞相结合,电站尾水检修门兼作4条低导流隧洞封堵时的隧洞出口挡水门。其中左岸电站尾水2×2000kN(单向)门式启闭机1台,轨道及附件1套,液压自动挂脱梁1套。右岸电站尾水2×2000kN(双向)门式启闭机1台,轨道及附件1套,液压自动挂脱梁1套。本文以右岸门机为例,根据双向门机的工艺特点和技术要求,阐述了西门子变频器在双向门机应用的方案,主要说明了大车同步与定位控制技术。

图1 乌东德水电站效果图
2 工艺介绍

图2 双向门机结构图
双向门式启闭机简称门机,安装在水电站的坝顶,用来启闭泄洪闸门,控制闸门进行泄洪,调节水库区内正常水位,保护大坝枢纽和水电站安全运行。门机主要有驾驶室、电气室、大车运行机构、小车、门架、电缆卷筒、大车夹轨器等组成。其中小车由起升机构、小车架、卷筒装置、电动机、制动器、减速器、集中润滑系统、液压挂脱梁电缆收放机构、小车运行机构、小车机房罩、机房内检修吊、电力拖动和控制设备等组成。其中大车运行机构由电动机、制动器、减速器、集中润滑系统、台车架和车轮组、电力拖动和控制设备等组成。双向门机通过大车行走机构沿着坝顶铺设的轨道行走至闸门位置,闸门通过液压自动挂拖梁在主起升机构带动下启闭,主起升机构可以通过小车行走机构沿着横梁行走,主提升机构可以通过小车行走机构沿着横梁行走使得双向门机区别于单向门机。

图3 乌东德双向门机

图4 双向门机大车
3 控制要求
大车运行机构、小车运行机构、起升机构不同时工作。大车最大连续运行距离133.3m,运行速度范围为2m/min~20m/min,满载恒转矩调速范围1:10,启制动加速度≤0.1m/s2,大车两侧分别驱动并能实现电气同步。大车运行能自动对位(对位闸门孔口中心线和闸门门库中心线),并且可运行到设定位置(可调整的6个位置)自动停车。
4 系统方案
本项目为2×2000kN双向门机控制系统。上位机采用10寸MP277触摸屏,安装在司机室的操作台上。控制器采用S7-300西门子可编程序控制器,安装在电气室的电气柜内,ET200M负责采集司机室的控制信号,安装在司机室的操作台内。主提升卷扬由两台160kW的S120变频器驱动,采用带传感器矢量控制方式;大车行走机构由相同的四套行走装置组成,两台45kW G120变频器分别各驱动4台电机,采用V/F控制方式。小车行走机构由相同的两套行走装置组成,一台5.5kW G120变频器驱动2台电机,采用V/F控制方式。变频器均安装在电气室的电气柜内。
1)系统配置
S7-300PLC站:
CPU313C-2DP
订货号6ES7313-6CG04-0AB0 版本 V3.3 数量1
DI16*DC24V
订货号6ES7321-1BH02-0AA0 数量4
DO16*DC24V/0.5A
订货号6ES7322-1BH01-0AA0 数量1
AI8*12Bit
订货号6ES7331-7KF02-0AB0 数量1
SM338 POS-Input
订货号6ES7338-4CB01-0AB0 版本V2.0 数量1
ET200M站:
IM153-1
订货号6ES7153-1AA03-0XB0 数量1
DI16*DC24V
订货号6ES7321-1BH02-0AA0 数量3
DO16*DC24V/0.5A
订货号6ES7322-1BH01-0AA0 数量1
触摸屏:
MP277
订货号6AV6643-0CD01-1AX1 数量1
主提升:
CU320-2DP
订货号6SL3040-1MA01-0AA0 CF卡V4.5 数量1
SLM 355KW
订货号6SL3330-6TE37-3AA3 数量1
MM 160KW
订货号6SL3320-1TE33-1AA3 数量2
SMC30
订货号6SL3055-0AA00-5CA2 数量2
大车变频:
G120 CU240E-2DP
订货号6SL3244-0BB12-1PA1 版本V4.5 数量2
G120 PM240
订货号6SL3224-0BE33-7UA0 数量2
小车变频:
G120 CU240E-2DP
订货号6SL3244-0BB12-1PA1 版本V4.5 数量1
G120 PM240
订货号6SL3224-0BE25-5UA0 数量1

图5 电气控制柜
2)系统结构

图6 系统结构图
3)硬件配置

图7 硬件配置图

图8 网络结构图
4)网络结构
5)监视画面
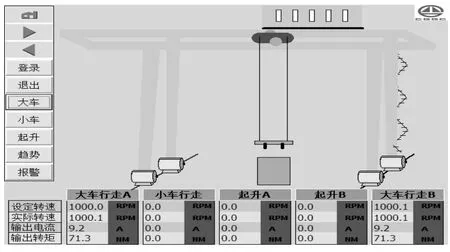
图9 监控画面
5 功能调试
主起升、小车、液压抓梁等控制这里不再讲述,这里主要介绍大车同步及定位控制技术。
1)大车同步
门机的大车行走机构由四个车轮构成,每个车轮由2台电机驱动,轨道上同侧两车轮的4台电机由一台G120变频器驱动,采用V/F控制。因为两侧车轮分别由两台变频控制,为了避免啃轨,两侧车轮的转速需要保持一致。因此采用丛丛通信的方式,将大车变频1的实际转速设为大车变频2的设定转速,在一个DP周期内实现设定转速同步。
首先在硬件配置中设置报文,CPU313C接收大车变频1的PZD同时,将其作为PZD发送给大车变频2。

图10 大车变频1报文

图11 大车变频2报文
在Starter中将大车变频1报文设为自由报文,修改报文P2050[0]=R2050[0]、P2050[1]=R63。

图12 大车变频1自由报文
在CPU313C中调用SFC14、SFC15周期一致性读写报文。

图13 读大车变频1报文

图14 写大车变频1报文

图15 读大车变频2报文
通过丛丛通信,大车变频1的控制字和实际转速成为大车变频2的控制字和设定转速,无需调用SFC15写大车变频2报文。

图16 大车变频2接收报文
由于大车行走机构跨距大、轨道高低平整不一致、车轮直径差、减速机速比差、联轴器联接松紧不一,容易导致大车两侧行走速度不一致而产生啃轨,需要手动调整。因此通常情况下,两台G120主从控制,大车变频2通过DX通信获取大车变频1的控制字和实际转速,并作为自己的控制字和设定转速,使得速度同步。当门架两边位置产生偏差时,由操作员点动大车变频1或2来调节大车位置偏差。
2)大车定位
工艺要求门机大车运行能自动对位(闸门孔口中心线和闸门库中心线),门机大车可以运行至6个设定点位置自动停车,便于对闸门和设定位置其他重物的起吊。G120需要做简单定位,可以采用停车后抱闸的方式。
OFF1和OFF3停车抱闸参数设置:P1215=1,P1216=100,P1217=100,P1226=20,p1227=400ms,P1228=10ms,P1335=0,P1351=0。励磁完成后电机打开抱闸,但延时P1216才输出频率。

图17 OFF1和OFF3停车抱闸曲线
实际频率到达P1226所设置的静态判断值后,延长1228的时间,抱闸关闭。抱闸关闭后,延长1217的时间后,转矩撤走。发出抱闸指令至到正抱紧抱闸,需要一定的响应时间,因此如果设的过短,电磁转矩撤走后,抱闸仍没有抱紧,非被动负载会发生溜车。
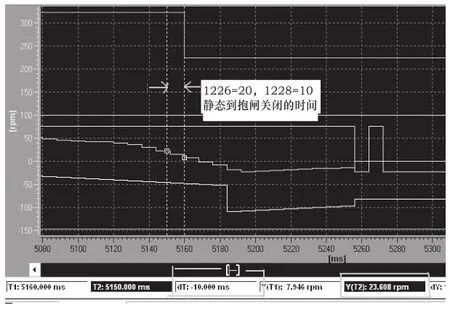
图18 静态至抱闸关闭时间

图19 抱闸关闭至撤磁时间
现场发现OFF1、OFF3停车后抱闸的方式效果不好,由于机械差异且门机惯量比较大,每次停车的位置差别不一。最终采用在定位点两侧设置减速点,以最小速度2m/min运行至定位点后OFF2停车并抱闸。在大车的合适部位布置两个瞬动型接近开关,一个为减速行程开关、一个为准确停位行程开关。在大车轨道旁的若干位置布置撞块,实现大车的准确停位控制。
OFF2停车抱闸参数设置:
P1215=1, P1216=100, P1335=0, P1351=0。
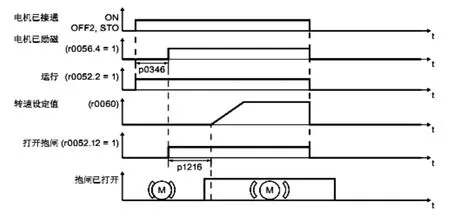
图20 OFF2停车抱闸控制图
CU240B/E-2相对与CU240S有一个改进,CU240B/E-2抱闸打开后,变频器再输出频率,即使最小频率不为0;而CU240S在抱闸打开之前就开始输出频率,最小频率的时候打开抱闸,所以在抱闸打开之前就有了转差形成了转矩,而抱闸还没有打开,可能对抱闸不好,还有可能产生堵转。
由于电机存在转差,需要对抱闸的启动频率做转差补偿。设置参数:V/F:P1300=0,P1352=1351 P1351=100(R0330),P1310=0,P1334=0,P1335=0。

图21 OFF2停车抱闸曲线

图22 CU240B/E-2抱闸控制图

图23 CU240S抱闸控制图

图24 转差补偿功能图

图25 转差补偿曲线
6 结论
本项目的难点在于门机两侧的大车同步和简单位置控制。由于门机两侧行走机构机械差异,虽然大车两侧给定速度一致,仍难免偶尔出现大车两侧位置不一致的情况,此时需要依靠点动来手动调整。工艺要求门机大车运行能自动对位(闸门孔口中心线和闸门库中心线),门机大车可以运行至6个设定点位置自动停车,便于对闸门和设定位置其他重物的起吊。G120需要做简单定位,可以采用停车后抱闸的方式。
[1] 《起重机设计规范》GB/T 3811.
[2] Sinamics S120调试手册.
[3] Sinamics S7-300调试手册.
猜你喜欢
价值工程(2022年27期)2022-10-10
农业装备与车辆工程(2021年8期)2021-08-28
建材发展导向(2021年10期)2021-07-16
南方农机(2021年1期)2021-01-20
快乐语文(2020年36期)2021-01-14
快乐语文(2019年36期)2020-01-04
快乐语文(2019年30期)2020-01-04
现代营销·理论(2019年10期)2019-09-10
中国卫生(2016年12期)2016-11-23
新高考·高一数学(2016年3期)2016-05-19
