
虚拟射击试验中航迹生成的验证方法
2015-11-28 05:08葛承垄朱元昌邸彦强孟宪国
火力与指挥控制 2015年8期
葛承垄,朱元昌,邸彦强,孟宪国
(军械工程学院,石家庄050003)
虚拟射击试验中航迹生成的验证方法
葛承垄,朱元昌,邸彦强,孟宪国
(军械工程学院,石家庄050003)
针对高炮武器系统射击精度试验中存在的问题,提出了虚拟射击试验方法,其中航迹生成是其核心问题。为验证航迹生成方法的合理性,首先给出了航迹生成的基本过程,得到了航迹生成的两大支撑点:某一时刻误差分布的正态性和区间的平稳性;其次,分别利用Kolmogorov-Smirnov检验法和t检验法、F检验法对航迹生成的两大支撑点进行验证;检验结果表明了两大支撑点的合理性,进而说明了虚拟射击试验中航迹生成的正确性。
虚拟射击试验,航迹生成,正态性检验,平稳性检验
0 引言
高炮武器系统作为地面防空部队的重要作战力量,其靶场试验已形成一套成熟的试验方法,然而传统高炮武器系统对空射击试验存在试验周期长、试验消耗大、试验组织繁琐等问题,为此必须应用先进技术来改进当前试验模式。随着仿真技术的发展,特别是虚拟试验场VPG[1](Virtual Proving Ground)技术的应用,为高炮武器系统射击试验开辟了新的试验思路。高炮武器系统虚拟射击试验技术的研究,对于促进仿真技术的靶场应用,加快试验模式转变具有重要的实用价值。虚拟射击试验原理如图1所示。

图1 高炮武器系统虚拟射击试验原理
高炮武器系统虚拟射击试验采用一种虚拟环境与实装结合的试验方式,即虚实合成[2]。其基本思想为:通过航迹生成得到目标实测数据,包括目标真值数据和目标测量值数据;利用目标真值数据在虚拟空间驱动虚拟靶机飞行,并将目标测量值数据通过特定注入接口注入到火控系统中,进而解算射击诸元,驱动炮塔转动;在特征点处,高炮武器系统进行射击,通过坐标映射算法,将脱靶量测量标准设备测得的弹丸坐标数据映射到虚拟空间,驱动虚拟弹丸飞行;最后,在虚拟空间中,利用目标真值数据和弹丸坐标数据得到脱靶量统计结果。其中,目标实测数据的生成过程称为航迹生成,且航迹生成是虚拟射击试验的核心组成部分,生成的航迹是整个试验系统运行的数据源,其生成过程的正确与否关系整个试验的可信性。
1 航迹生成的基本过程
在实际靶场试验中,先进行动态精度飞行试验即校飞,用于检验高炮综合体的动态精度,而后进行对空射击试验。动态精度飞行试验除了不射击外,其他过程与射击试验类似,因而考虑将动态精度飞行试验数据作为航迹生成的数据源。航迹生成过程如2所示。
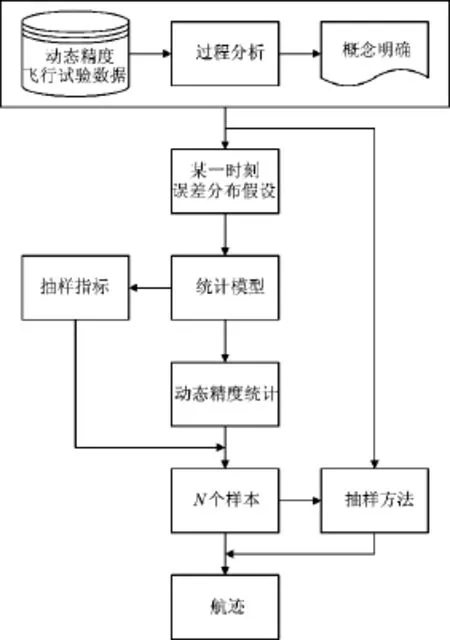
图2 航迹生成过程
动态精度飞行试验中,靶机沿固定航路重复飞行,得到若干航迹,并根据航迹数据得到测量误差(计算方法不再赘述)。靶机沿航路的飞行过程是一个随机过程,每一条航迹是随机过程的一个实现,某一时刻是随机过程的一个截口。因而对于某一时刻的测量误差有:所有可能航迹在此时刻的误差称为总体;每一条航迹上在此时刻的测量误差称为个体;做若干次飞行试验得到若干测量误差的过程称为抽样,若干个测量误差称为样本。为针对测量误差进行统计分析,必须明确某一时刻测量误差的分布。由于在靶场试验中,测量误差受人为因素、环境因素等多种随机因素的综合影响,因而某一时刻的测量误差服从正态分布[3-4]。
记动态精度飞行试验中某一时刻的测量误差为随机变量X,那么X服从正态分布即X~N(μ,α2)。设X1、X2、...、Xn是来自X的样本,则样本均值和方差为:
根据区间估计理论,整理可得均值μ的置信水平为1-α的区间估计[5]为:

置信区间长度为:

从式(4)出发,提出确定N个样本的抽样指标:置信区间长度、置信区间长度变化率,同时还要考虑成本等实际因素。且这些指标针对的是全航路,而不是仅仅一个时刻,为此必须进行全航路动态精度统计。从整个时间过程看,测量误差受随机因素影响在整个航路上是不平稳的,但是可以根据平稳性的概念将全航路划分为若干平稳区间。在某一平稳区间内,所有测量误差可以看作来自同一正态总体,整个航路就可以看作是由若干正态总体组合而成,因而能将其精度统计结果应用于由某一时刻服从正态分布推导出的抽样指标中。文献[6]给出了动态精度的计算方法,动态精度统计示意图如图3所示。根据动态精度统计方法得到不同航次数量下对应的精度指标,然后根据斜距离误差、方位角误差、高低角误差均值的置信区间长度及变化率得到N的取值。最后根据动态精度飞行试验过程选取适当的抽样方法从N条航迹中抽取一条应用于虚拟射击试验中的航迹。
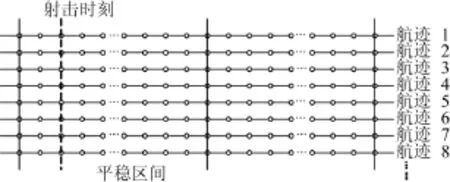
图3 动态精度统计示意图
2 航迹生成的验证方法
为验证仿真系统/模型的可信性,在建模与仿真(Modeling and Simulation,M&S)领域有专门的验证方法即建模与仿真的校核(Verification)、验证(Validation)与确认(Accreditation)(简称VV&A)。VV&A[7]的基本思想为首先给出仿真系统的可接受误差区间,然后计算仿真输出与实际输出的差值是否在可接受区间内。然而航迹生成的特殊性在于最后获取的一条航迹就是经过实际动态精度飞行试验得到的,而不是仿真产生的数据。因而传统的VV&A方法在此并不适用,必须考虑其他的验证思路。
从航迹生成的基本过程可以看出:一方面,统计模型及抽样指标是根据某一时刻的测量误差服从正态分布得出的,因而某一时刻测量误差分布的正态性决定了统计模型及抽样指标的合理性;另一方面,动态精度统计中平稳区间的划分影响动态精度统计结果,进而影响N值的确定以及航迹的获取。
通过以上分析,某一时刻测量误差分布的正态性和动态精度统计中区间的平稳性是航迹生成方法的两大支撑点。由此,航迹生成的验证可从以下两点入手:某一时刻测量误差分布的正态性检验和区间平稳性的检验。
2.1正态性检验
在统计应用中,常用的正态性检验方法有正态概率纸检验法、Kolmogorov-Smirnov检验法、Lilliefors检验[8]法、Jarque-Bera检验[8]等。其中Kolmogorov-Smirnov检验法不用数据分组且不损失数据中的信息,对于小样本的可靠数据,是一种有效的方法,因而正态性检验采用Kolmogorov-Smirnov检验法。
Kolmogorov-Smirnov检验[9-10]法是一种基于假设检验理论的分布拟合优度检验方法,用于检验来自某一总体的样本是否服从指定的分布。首先对样本数据进行排序,由小到大得到N个样本数据x1、x2、…、xN,按照经验分布函数的建立方法得到分段累积频率FN(x)。FN(x)是一个阶跃函数,函数曲线呈阶梯状,在每一个数据点处的阶跃值为1/N。

然后根据经验分布函数FN(x)与假设分布FN(x)的差异值来建立统计量D。

Kolmogorov-Smirnov检验的零假设和备择假设为:零假设H0:样本数据服从指定的分布;备择假设H1:样本数据不服从指定分布。对于给定的显著性水平α,查找Kolmogorov-Smirnov检验的临界值DN,α,若D<DN,α则接受零假设,若D>DN,α则拒绝零假设。Kolmogorov-Smirnov检验的原理示意图如图4所示。
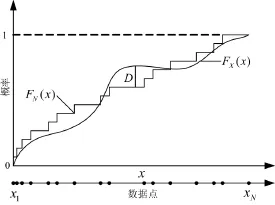
图4 Kolmogorov-Smirnov检验原理
2.2平稳性检验
理论上,若要区间保证平稳性,则要求区间内任意两个时刻的误差分布相同,即来自于同一正态母体。这就要求对区间内任意两个时刻所服从的正态分布的均值和方差进行比较。统计学上,两个正态变量均值和方差的比较等价于两个正态变量均值差和方差比值的假设检验,分别对应t检验和F检验[11-12]。
设平稳区间内任意一时刻的测量误差X~N(μ1,),另一时刻的测量误差,样本分别为(x1、x2、…、xn)和(y1、y2、…、ym),样本的均值分别为,样本方差分别为SX2、SY2。均值相等的检验中只考虑未知且的情形。检验的假设为:
零假设H0:μ1=μ2;
备择假设H1:μ1≠μ2。
构造统计量:
方差相等的检验中考虑μ1、μ2未知的情况。检验的假设为:
零假设H0:;
构造统计量:

3 实例分析
航迹确定过程中共获取动态精度飞行试验航迹数据20条,共计860个时刻,划分为6个平稳区间,根据已有数据得出样本量为16,这16条航迹数据在一定置信水平下代表了所有航迹的数据特征,并根据抽取算法得到虚拟射击试验所需要的一条航迹。以斜距离测量误差为例,先对某一时刻误差分布正态性进行验证。


图5 正态性检验实例
类似地,对斜距离误差其余859个时刻和方位角误差、高低角误差各时刻进行正态性检验,检验结果如表1所示。
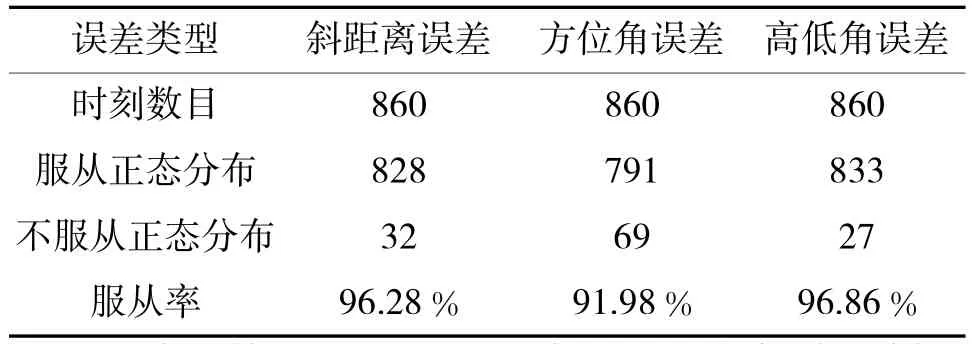
表1 正态性检验统计表
从检验结果看,3种误差类型的绝大部分时刻的误差数据均满足正态性,证明某一时刻误差数据服从正态分布的假设是正确的。其中,斜距离误差和高低角误差的正态性较好,方位角误差的正态性相对较差,主要是在航路捷径附近方位角变化剧烈引起的。
同理,利用平稳性检验方法(t检验和F检验)对斜距离误差、方位角误差、高低角误差的平稳区间进行平稳性检验。为简化检验过程,考虑到区间的时间跨度较短,且靶机飞行速度较快,因而只对区间端点处的样本数据进行平稳性检验,区间检验结果如表2所示。从统计结果看,区间平稳性假设是合理的。
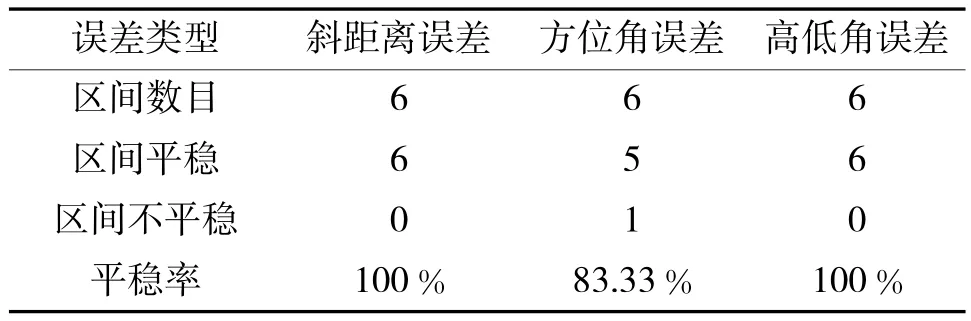
表2 平稳性检验统计表
4 结束语
本文通过分析虚拟射击试验的航迹生成过程,提出了航迹生成的验证方法,即某一时刻误差分布的正态性检验和区间的平稳性检验。检验结果表明,某一时刻误差分布的正态性和区间平稳性的分析假设是合理的,有力证明了航迹生成的正确性,夯实了虚拟射击试验的理论基础。
[1]杨琳.高炮武器系统射击试验仿真推演环境研究与实现[D].石家庄:军械工程学院,2009.
[2]李一,冯楠.反舰导弹突防虚实合成试验方法[J].火力与指挥控制,2012,37(10):185-188.
[3]包国忱,柴义隆.电子装备试验数据处理[M].北京:国防科工委司令部,1997:38-42.
[4]阎章更.兵器试验统计学[M].北京:国防科工委司令部,1990:68-78.
[5]盛骤,谢式千,潘承毅.概率论与数理统计[M].北京:高等教育出版社,2000:195-200.
[6]GJB 3856—99.中华人民共和国国家军用标准——高炮综合体定型试验规程[S].北京:国防科工委,1999.
[7]李姝.导弹系统仿真模型验证方法研究[D].长沙:国防科学技术大学,2003.
[8]包严科,李娜.数理统计与MATALB数据处理[M],沈阳:东北大学出版社,2008:123-128.
[9]周明中.大规模网络IP流行为特性及其测量算法研究[D].南京:东南大学,2006.
[10]王硕.桥梁运营荷载状况分析[D].上海:同济大学,2007.
[11]常显奇,程永生.常规武器装备试验学[M].北京:国防工业出版社,2007:58-63.
[12]白颖,李峻年.舰载火箭炮系统对岸射击试验修正方法[J].四川兵工学报,2013,32(3):23-25.
Validation Method Research of Flight Path Generation for Virtual Firing Test
GE Cheng-long,ZHU Yuan-chang,DI Yan-qiang,MENG Xian-guo
(Ordnance Engineering College,Shijiazhuang 050003,China)
Aiming at the deficiencies of firing accuracy test for anti-aircraft weapon system,the virtual firing test method is proposed and the flight path generation is core problem.To verify the rationality of flight path generation,the flight path generation basic process is introduced firstly and two underprops of flight path generation are obtained:normality of error distribution in a particular time and intervals'stationarity.Two underprops of flight path generation are validated by Kolmogorov-Smirnov test method,t test method and F test method relatively.Test results show the rationality of two underprops and indicate the validity of flight path generation for virtual firing test.
virtual firing test,flight path generation,normality test,stationarity test
TP391.9;TJ35
A
1002-0640(2015)08-0086-04
2014-06-05
2014-08-06
葛承垄(1990-),男,山东平阴人,硕士研究生。研究方向:武器系统仿真。
猜你喜欢
红领巾·萌芽(2022年3期)2022-03-13
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
矿产勘查(2020年6期)2020-12-25
浙江大学学报(理学版)(2020年6期)2020-12-07
科技与创新(2020年19期)2020-10-09
现代商贸工业(2020年24期)2020-07-17
铁道运营技术(2020年2期)2020-04-08
数学学习与研究(2019年8期)2019-06-21
微电机(2019年12期)2019-03-26
电子技术与软件工程(2018年6期)2018-02-23
