
浮筏安装姿态对机械隔振系统性能的影响
2015-12-04 07:06周赤奇徐北平
舰船科学技术 2015年1期
周赤奇,许 锐,徐北平
(武昌船舶重工有限责任公司 减振降噪所,湖北 武汉430060)
0 引 言
船舶上很多重要机械设备都安装在浮筏上面,为了合理分配振动源的激励力向下传递,需要控制浮筏的姿态。为了更好地控制浮筏振动向隔振器下端传递的振动能量,需要确定合适的浮筏安装姿态参数范围。
通过对某舱浮筏安装现场施工进行调研得知,由于机械隔振器的刚度较小、存在蠕变效应和大部分设备采用侧挂安装、重心和中心不重合等原因,浮筏单个方向安装的平行度误差不易控制在1 mm以内的理想状态,同时将制约产品的建造周期。但若将浮筏的单个方向平行度误差控制在5 mm 以内的最大平行度时将易于实现[1-4]。
本文采用理想平行度及最大平行度(包括纵向与横向水平度)误差样本,开展浮筏不同安装姿态下,对隔振系统的隔振效果影响试验。通过获取试验中LMS 采集到的激励点到响应点间的频响函数数据,对比分析在理想平行度及最大平行度下浮筏的振动传递性能,确定平行度参数对系统振动传递性能影响显著的样本范围,为某舱浮筏安装提供指导性原则,为工艺文件的制订提供依据。
1 浮筏安装姿态对隔振性能影响试验研究方案
1.1 研究对象
选取某船舶低速巡航时需开启关键设备所对应的某舱浮筏作为研究对象,开展浮筏不同安装工艺状态对隔振效果的影响试验研究。
本试验装置示意图和测试现场浮筏安装图分别如图1和图2所示。刚性平台的固有频率低于1.5 Hz,浮筏不同安装姿态参数调整到位,试验台架内无其他设备及人为干扰。

图1 试验装置示意图Fig.1 Schematic of the experimental apparatus

图2 测试现场浮筏安装图Fig.2 Test field installation of the floating raft
1.2 试验方案
利用前期现场调研得到的某舱浮筏安装时产生的最大平行度及最大平行度(横向和纵向)范围,调整某舱浮筏到特定的安装工艺姿态,采用锤击法分别对浮筏上6个隔振器的安装位置按顺序进行单点激励,测量各激励点到响应点间的传递函数。通过对试验结果进行分析对比,明确某舱浮筏安装的纵向平行度及横向平行度对系统振动传递性能影响显著的样本区间[5-6]。
某舱浮筏安装现场较易控制的平行度调整误差约为5 mm (称之为最大误差),在此范围内研究纵向平行度和横向平行度误差对系统振动传递性能的影响。
1)对于浮筏纵向平行度工艺误差,分别在理想纵向平行度和最大纵向平行度下对结构的传递函数进行测量,并合成基座各测点的平均归一化加速度级。如果差值仅在2 dB 以内,则接受结果并停止计算;如果差值大于2 dB,则采取二分法在理想平行度和最大平行度误差的中值处对系统振动传递性能进行测试,并合成基座各测点的平均归一化加速度级。如果与相邻样本点的差值仅在2 dB 以内,则接受结果并停止计算;如果与相邻样本点差值大于2 dB,则继续在差值大于2 dB的区间采取二分法,以此类推,直到最后测试的样本点与相邻样本点的差值小于2 dB,浮筏安装姿态试验方案流程图如图3所示。

图3 浮筏安装姿态试验方案流程图Fig.3 Test program flow chart of floating raft installation postures
2)对于浮筏横向平行度工艺误差,处理步骤完全如上所述。
2 试验结果分析
试验中某舱浮筏各姿态平行度误差实际数值如表1所示。

表1 浮筏安装各姿态平行度误差数据Tab.1 Parallelism error data of floating raft installation postures
由测试报告可知:
1)各测点的平均归一化加速度级
在浮筏3个不同安装姿态下,测试共选取15个振动测点,其中6个测点 (测点1~测点6)布置在浮筏下层隔振器船体基座垫板上,测量垂直于基座面板方向(Z 向);8个测点(测点7~测点14)布置在基座腹板、基座肘板与耐压壳体交接部位上,测量X,Y,Z 三个方向;测点15位于筏架下舱段中部,测量X,Y,Z 三个方向。响应点具体布置位置如图4所示。将测点1~测点6、测点7~测点15 在6个激励点激励叠加后的归一化加速级均合成得到响应点在6个激励点激励叠加后的平均归一化加速度级(归一化振动加速度级基准:a0=10-6m·s-2/N),如图5~图6所示。
2)各测点归一化加速度总级
浮筏不同安装姿态下,各测点在10~700 Hz 频段内的归一化加速度总级,以及1~6 号点、7~15号点平均归一化加速度总级,对比图如图7所示。
图5~图6 中,实线曲线代表姿态1 时筏架基座测点1~测点6和布置在筏架基座肘板、腹板与耐压壳体的交汇处和耐压壳体中心处的测点7~测点15 在6个激励点激励下的平均归一化加速度级频谱图(10~700 Hz),虚线曲线代表姿态2 时筏架基座测点1~测点6和测点7~测点15 在6个激励点激励下的平均归一化加速度级频谱图(10~700 Hz),点虚线曲线代表姿态3 时筏架基座测点1~测点6和测点7~测点15 在6个激励点激励下的归一化加速度级频谱图(10~700 Hz)。
由图5和图6 可知:在10~700 Hz 内,3 种浮筏安装姿态对应的3 条曲线波形相近,幅值差异很小,各波峰及波谷几乎在同一个频率位置出现。
由试验数据可知:
1)在10~700 Hz 范围内,筏架6个基座处测点在姿态1下6个激励点激励后的平均归一化加速度总级为53.60 dB,在姿态2下为54.25 dB,在姿态3下为54.52 dB,显然筏架6个基座处测点在姿态1 即平行度均为理想状态下6个激励点激励后的平均归一化加速度总级最小,而在姿态2和姿态3时平均归一化加速度总级会略有增大。从数值上看,三者两两相差仅仅0.65 dB和0.92 dB,因此试验无须采用二分法继续向下进行。

图4 响应点布置示意图Fig.4 Schematic of response points

图5 浮筏不同姿态1~6 号测点在6个激励点激励叠加后平均归一化加速度级频谱对比图Fig.5 Comparison of average normalized acceleratio level spectrum of No.1 to No.6 measuring points on floating raft under 6 points excitation superposition

图6 浮筏不同状态7~15 号测点在6个激励点激励叠加后平均归一化加速度级频谱对比Fig.6 Comparison of average normalized acceleratio level spectrum of No.7 to No.15 measuring points on floating raft under 6 points excitation superposition
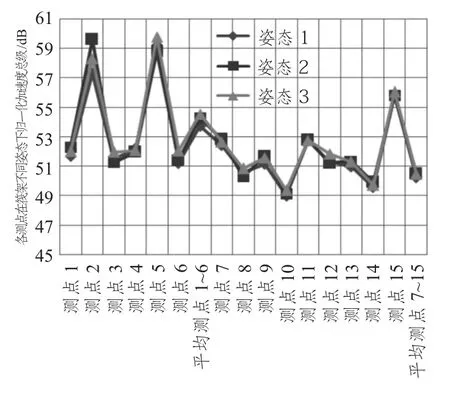
图7 各测点在筏架3 种安装姿态下归一化加速度总级对比图Fig.7 Comparison of normalized acceleratio total level all measuring points on floating raft in there installation postures
2)在10~700 Hz 范围内,筏架9个基座肘板、腹板与耐压壳体的交汇处和耐压壳体中心处的测点(7~15)在姿态1下6个激励点激励后的平均归一化加速度总级为50.25 dB,在姿态2下为50.49 dB,在姿态3下为50.43 dB,显然筏架9个测点在姿态1 即平行度均为理想状态下6个激励点激励后的平均归一化加速度总级最小,而在姿态2和姿态3 时平均归一化加速度总级会略有增大。从数值上看三者两两相差仅仅0.24 dB和0.18 dB,因此试验无须采用二分法继续向下进行。
由图7 可以看出,横向平行度和纵向平行度安装工艺误差对系统振动传递性能影响并不显著:
1)横向平行度误差5 mm:在10~700 Hz 内,姿态1和姿态2 曲线总体波形相似,姿态1的曲线基本在姿态2 曲线下面,大部分测点相差很小,其中最大差值点出现在测点2,相差2.29 dB,最小差值在测点15,相差0 dB;
2)纵向平行度误差5 mm:在10~700 Hz 内,姿态1和姿态3的曲线总体几乎重合,姿态3的曲线稍微在姿态1 曲线上面,其中最大差值点出现在测点2,相差0.98 dB,最小差值点出现在测点11,相差0 dB,测点重合。
由1)和2)的分析可知,当筏架安装的横向及纵向平行度工艺误差较大时,作用在筏架上的振动更易向基础传递,但这种差异很小,不超过1 dB,几乎可以忽略不计。
3 结 语
通过对试验结果进行比较分析,初步认为以目前浮筏现场安装施工工艺的水准,3 种安装姿态下不同的平行度误差对机械隔振系统隔振性能的影响相差约1 dB,可忽略不计。则当浮筏安装纵向平行度误差达到1 mm 内的理想状态时,横向平行度安装工艺误差只需控制在5 mm 内,或者当浮筏安装横向平行度误差达到1 mm 内的理想状态时,纵向平行度安装工艺误差只需控制在5 mm内,即可确保此姿态参数对隔振系统的隔振性能基本没有影响。
[1]梁向东.浮筏安装工艺的改进[J].噪声与振动控制,2011(5):178-180.LIANG Xiang-dong.Improving raft fixing technoque[J].Noise and Vibration Control,2011(5):178-180.
[2]郑涛,陈卫东.吸振器在浮筏隔振系统中的应用[J].噪声与振动控制,2013(3):44-49.ZHENG Tao,CHEN Wei-dong.Application of vibration absorbers in floating raft system[J].Noise and Vibration Control,2013(3):44-49.
[3]彭伟才.浮筏隔振系统有限元模型中基座的等效方法[J].中国舰船研究,2012,7(3):89-92.PENG Wei-cai.Equivalent machinery base method for finite element analysis of floating raft isolation system[J].Chinese Journal of Ship Research,2012,7(3):89-92.
[4]中国船舶重工集团公司七〇一所.GJB 4057-2000.舰船噪声测量方法[S].China Ship Development and Design Center.GJB 4057-2000.Ship Noise Measurement Method[S].
[5]高云剑.基于频响函数综合的浮筏隔振系统误差传递分析[J].噪声与振动控制,2013,33(3):39-43.GAO Yun-jian.Analysis of uncertainly propagation in floating raft system using FRF-based substructuring method[J].Noise and Vibration Control,2013,33(3):39-43.
[6]张峰.浮筏隔振效果评定的矢量四端网络参数方法与试验研究[J].船舶力学,2011,15(10):1173-1181.ZHANG Feng.Evaluation and experimental research on floating raft isolation system by vectorial four pole parameter model[J].Journal of Ship Mechanics,2011,15(10):1173-1181.
猜你喜欢
新高考·高一数学(2022年3期)2022-04-28
思维与智慧·上半月(2022年4期)2022-04-08
制造技术与机床(2022年2期)2022-02-22
小哥白尼(神奇星球)(2021年4期)2021-07-22
防爆电机(2021年2期)2021-06-09
汽车实用技术(2021年10期)2021-06-04
意林(2021年10期)2021-05-28
天津城建大学学报(2020年4期)2020-09-10
模具制造(2019年7期)2019-09-25
船舶标准化工程师(2019年4期)2019-07-24
