
基于双目视觉的越野机器人硬件系统的设计与实现
2015-12-08 13:03宋伟奇覃妮妮
电脑知识与技术 2015年25期
宋伟奇++覃妮妮
摘要:本文首先简单介绍了越野机器人特点和现在研究发展的现状。针对存在的问题,通的实验研究设计出越野机器人硬件电路系统,提出一种采用 CCD 图像传感器的双目视觉越野机器人系统,为障碍物检测研究搭建实验平台。
关键词:越野机器人;障碍物检测;双目视觉
中图分类号:TP18 文献标识码:A 文章编号:1009-3044(2015)25-0125-02
1概述
越野机器人是一种可以室外非结构化路面环境下通过传感器识别环境和自身状态,实现对目标导航的机器人系统。越野机器人在行驶过程中,通过不断地收集、处理路面环境数据,最后运算并做出决策判断,随时调整自身的行进状态并执行相应的动作和操作,并且其还应具有自主学习和自适应的功能。。
越野机器人的研究涉及图形图像处理、计算机视觉、人工智能、自动化控制、等多个专业的理论与技术,是计算机科学和电子传感技术的结合。可实现障碍物自主识别、无人驾驶汽车、安全测距、车速控制等功能,在军用及民用多个领域都有重要应用价值。越野机器人的研究是相关技术领域交叉相互促进发展的结果,其中视觉识别技术是其中的一个重要研究内容。
越野机器人的视觉系统就像人的眼睛,主要完成路面信息采集、识别障碍物等功能,是机器人自主行驶中最重要的部分,称为视觉信息传感与实时处理技术。通常越野机器人的视觉信息的采集大多采用彩色摄像机来完成。视觉信息的正确与否、处理是否及时都关系到越野机器人行驶的速度、道路跟踪以及避障的效果,更是实现越野机器人运行实时性和鲁棒性的基础,可能认为是整个越野机器人系统中最关键的技术。越野机器人采用的视觉技术主要有二维视觉和三维立体视觉两种,因三维立体视觉可以直接获取路面环境三维特征,比较适合于越野环境下行驶区域与障碍区域的检测与识别,从而得到广泛研究和重视。
越野机器人三维立体视觉系统的障碍物检测技术主要又分为单目视觉和双目视觉检测。单目视觉检测的方法是基于特征和运动参数,结合模式识别来进行检测,但这种类方法中提取特征和运动参数估计相对困难,且适应性不强;双目视觉技术是模仿人的眼睛特点,从而计算多种视差图来获取障碍物距离、位置等数据。本项目开发设计的是基于双目视觉的越野机器人硬件平台和软件系统。
2硬件系统的结构设计
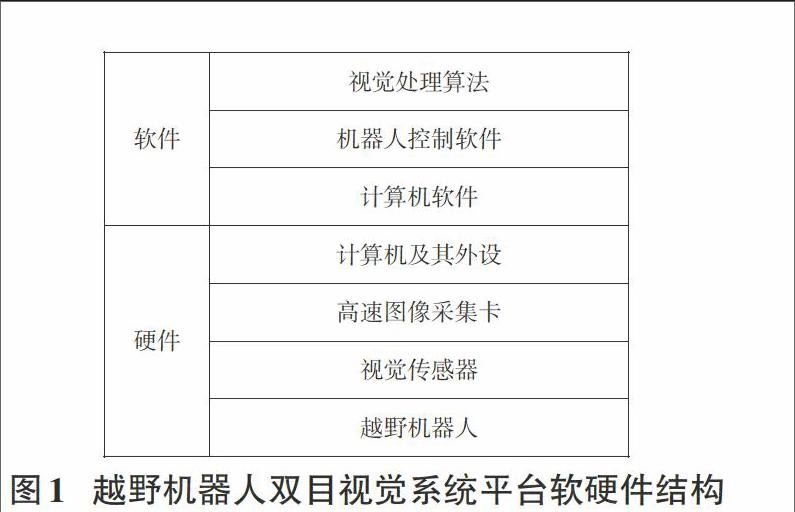
越野机器人的视觉系统在整个机器人系统中起着非常重要的作用,其能够帮助机器人进行目标识别和目标定位。越野机器人视觉系统一般以计算机为中心,硬件系统由越野机器人、计算机、视觉传感器和高速图像采集卡组成;软件系统由计算机系统软件、视觉处理算法、机器人控制软件组成。如图1所示。
图1 越野机器人双目视觉系统平台软硬件结构
2.1越野机器人
越野机器人是一种能自主识别环境,并完成动态决策与规划、行为控制与执行等多种功能综合机器人系统。越野环境中的运动机器人的行驶机构主要分为履带式、步行式和轮式三种,三种行驶机构各有其优点。本项目的越野机器人采用是自主履带式移动机械平台机器人系统。平台硬件系统的组成部分:车体、智能控制箱、立体导航系统,也就是双目立体视觉系统安装在车体的前部,智能控制箱安装在车体后部,车体为履带式行走机构,包括电池,直流电机、各种驱动器以及两个前驱动轮和两个后被动轮。左、右轮式机构分别由左、右直流伺服电机驱动。
双目立体摄像头在越野机器人车体的前部,左右各一路超声传感器前摄像头。越野机器人智能控制箱在车体的后部,上面一排依次是:开机按钮、电量指示窗、关机按钮。下面一排依次是:左后超声、倒车摄像头、右后超声。红色的急停按钮和液晶触摸屏显示器分别安装在控制箱的面板上。同时安装有有线网口或无线收发器模块,可以对越野机器人进行远程控制及监控。
2.2视觉传感器
视觉传感器是整个系统中的基础视觉信息源。本项目的越野机器人采用两个视觉传感器组成双目立体视觉系统,两个传感器的性能参数要求一致。其主要功能是从不同角度同时获取行驶环境中的原始图像。常用的视觉传感器有CCD摄像机、CMOS摄像机等。CCD摄像机是一种利用电荷存储传送和读出方式进行工作的固体摄像器件,是目前应用较多的图像采集装置。以CCD摄像机+视频采集卡+计算机结合进行视频捕获的方式应用也最为成熟,同时其具有体积小、重量轻、功耗小的特点,在分辨率、灵敏度和实时传输等方面也有良好的性能。本项目采用的两个相同的CCD摄像机保持水平,并互相平行,组成双目立体平行视觉系统。摄像机是彩色CCD摄像机,呈像颜色为彩色IP180,焦距为2.8mm,广角清晰度为960P/1080p,逐行扫描CCD传感器,镜头可视角度量2.8mm@F1.4,如图2所示。
图2 双目立体摄像机
2.3高速图像采集卡
图像采集卡是将越野机器人从CCD摄像机采集的视觉图像形成的模拟信号,经A/D器转换为离散的数字信号,再将这些数字信号存储在计算机的存储器中。当计算机发出传送指令时,可将图像信息经过PCI总线送到计算机内存用于计算机运算处理。
本项目设计的是双目视觉系统,需要两个摄像机同时采集路面信息,故我们采用是多路彩色视频图像采集卡,具备图像高品质的质量、稳定性和集成度高等特点。图像采集卡支持PCI总线、多路操作的功能,能同时对两路以上彩色图像实现实时采集,将输入的彩色图像信号,经数字解码器、模/数转换器进行缩放比例、裁剪、采集、色度空间变换等处理,最后通过PCI总线送达到计算机内存中实时存储下来。满足了本项目需要支持二路视频的同时采集的双目立体视觉系统的需要。
2.4计算机
本项目的视觉系统采用的计算机为嵌入式计算机,CPU处理器为Intel Pentium Dual-core T4400,内存2G ,主频2.2GHz,具备百兆网络接口和提供PCI外接插槽,Intel芯片组集成显示控制器和图像处理引擎控制,组成成本低、功耗低、速度高的嵌入式系统。越野机器人所采集到的两路图像分别经多路切换器,A/D解码将数据送到数据缓冲器,经裁剪、比例压缩及格式转换后,由内部控制图形系统完成数据传输工作,最后输出到控制计算机系统中。图像信息中障碍物目标位置的数据由软件运件确定,最后存入是计算机系统内存。两路复合图像分时采集正好符合项目要求中对两个摄像机同时进行图像采集的要求。与彩色图像采集卡组成了高速的采集和处理系统,是整个越野机器人视觉系统的核心硬件系统。
3结论
本文主要是对双目立体视觉越野机器人平台进行了研究,实现对复杂空间中的障碍物进行检测并进行三维重构,为越野机器人的导航、定位、避障等设计的越野机器人硬件系统平台。重点分析了建设双目视觉越野机器人的硬件系统组成和结构,及各组成部分的性能特点。根据该平台的性能,分析比较了几种可行的双目视觉障碍物检测方法,为下一步进行程序开发做好理论基础。
参考文献:
[1] 陈雪,张卫彬.基于双目立体视觉的障碍物检测方法[J].软件导刊,2012(2).
[2] 王晶,苏光大.改进的双目立体视觉正面脸合成[J].应用科学学报,2014(1).
[3] 杨建荣,曲仕茹.基于单目视觉的障碍物检测方法研究[J].计算机仿真,2009(2).
