ABB控制器CD522在棒控棒位系统中的应用
2015-12-28 03:39韩利峰汪全全邓辉宇魏永波陈永忠刘桂民
核技术 2015年9期
韩利峰 汪全全 邓辉宇 魏永波 陈永忠 刘桂民
1(中国科学院上海应用物理研究所 嘉定园区 上海 201800)
2(中国科学院核辐射与核能技术重点实验室 上海 201800)
ABB控制器CD522在棒控棒位系统中的应用
韩利峰1,2汪全全1,2邓辉宇1,2魏永波1,2陈永忠1,2刘桂民1
1(中国科学院上海应用物理研究所 嘉定园区 上海 201800)
2(中国科学院核辐射与核能技术重点实验室 上海 201800)
中国科学院钍基熔盐核能系统固态燃料堆(Thorium-based Molten Salt Reactor-Solid Fuel, TMSR-SF)的控制系统设计采用ABB公司800XA系列可编程逻辑控制器(Programmable Logic Controller, PLC)硬件。800XA系列的PLC虽然控制器和I/O模块丰富,但唯独缺少反应堆棒控棒位系统中关键的步进电机控制器模块。利用ABB PLC丰富的现场总线接口,将AC500系列中的CD522步进电机控制器应用到系统中,实现了800XA基于Profibus-DP即插即用的配置。组态过程中通过对控制器输入输出寄存器的灵活分配,不仅实现了控制器功能的定制,而且简化了后续函数库编程。编写了脉冲输出和编码器功能函数库,实现脉冲输出控制和编码器计数两个主要功能,并对棒控棒位系统的硬件结构进行了可靠性分析。组态好的控制器各项参数可满足棒控棒位系统的要求。
钍基熔盐堆,CD522,棒控棒位系统,可靠性分析,Profibus-DP
ABB公司AC800M系列可编程逻辑控制器(Programmable Logic Controller, PLC)具有丰富的现场总线接口,如Profibus-DP、Modbus/TCP、RS232等,利用这些总线接口可以组态其它系列或其它厂商的设备。另外AC800M系列PLC硬件从电源、CPU控制器、接口模块、I/O实现全方位的冗余,且冗余结构上下层独立。如CPU冗余跟通讯接口冗余独立,CPU冗余切换不影响接口模块的切换,反之也成立。这些结构的特点使AC800M系列PLC硬件具有较高的可靠性和更加灵活的组态方法。
钍基熔盐固态燃料堆(Thorium-based Molten Salt Reactor-Solid Fuel, TMSR-SF)控制棒驱动机构结构(Control Rod and Drive Mechanism, CRDM)设计如图1所示。步进电机通过离合器和减速器驱动链轮进行旋转运动,链轮带动链条和控制棒棒体做上下直线运动,3组6个旋转变压器用于棒位的粗略和精确测量以及相互校核。通常PLC的步进电机控制器分为两种:一种使用V/F转换模块,将模拟电压信号线性地变换成频率值正比于电压的数字脉冲信号,全量程范围内的线性度是影响该模块性能的主要因素;另一种是使用数字量控制的步进电机控制器,如ABB CD522步进电机控制器。这样的模块使用数字量控制脉冲频率和脉冲输出个数,不存在转化误差。并且CD522数字步进电机控制器具有编码功能,可以同时实现角位移测量数据的采集,结合控制策略可构成闭环步进电机控制系统。CD522提供两路编码器和两路脉冲输出功能。
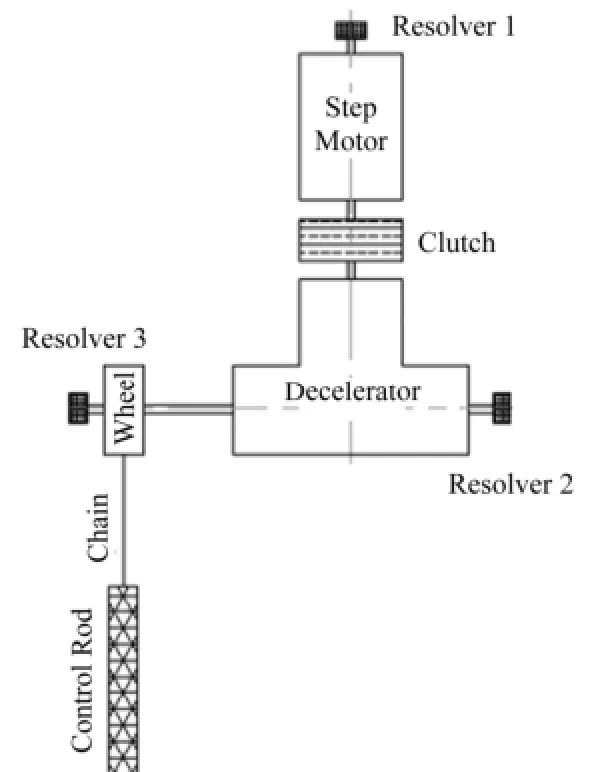
图1 控制棒驱动结构设计Fig.1 Design of control rod and drive mechanism.
清华大学的10MW高温气冷堆在控制系统改造设计中也采用了AC800M系列硬件[1]。但控制棒控制使用非标的V/F转换模块作为步进电机控制脉冲输出源,主要原因是AC800M系列硬件中没有相应的步进电机控制器模块,V/F转换方式是改造前现成的方案。经调研ABB AC500系列中有步进电机控制模块CD522,通过Profibus-DP接口模块CI542可以将其组态到了AC800M软件系统中。
1 CD522模块组态
按照国际标准IEC61158,Profibus-DP可以实现主站和多种类型从站间的数据通讯。不同厂商或类型的从站设备参数完全不同,为识别这些设备并且实现各种数据交换,主站需要连接到从站的技术特性数据,这就是设备数据库文件GSD (Generic Station Description)[2]。
GSD文件主要包括模块的功能配置数据和模块I/O寄存器地址数据。功能配置数据完成功能模式的初始化,在模块运行过程中这些初始化模式参数是不能改变的,除非模块功能性重启。I/O寄存器地址是模块运行过程中用户可以跟模块进行交互的寄存器地址。通过监视或者控制这些寄存器,用户可以监视或控制模块在特定功能模式下的状态。例如:在CD522初始化过程中指定其工作模式为PWM (Pulse Width Modulate)脉冲调宽调制输出模式或Pulse脉冲输出模式。模式指定之后I/O寄存器功能即发生相应转化,如PWM模式下占空比控制寄存器在Pulse模式下转变为脉冲输出数量控制寄存器。
本文厂家提供的GSD文件在配置数据部分定义比较详细(46字节),可通过优化GSD文件使其功能单一,以便实际操作。编码器功能由原来13种模式减至4种,如表1所示。脉冲输出由两种模式优化为一种,步进电机控制只需Pulse模式。
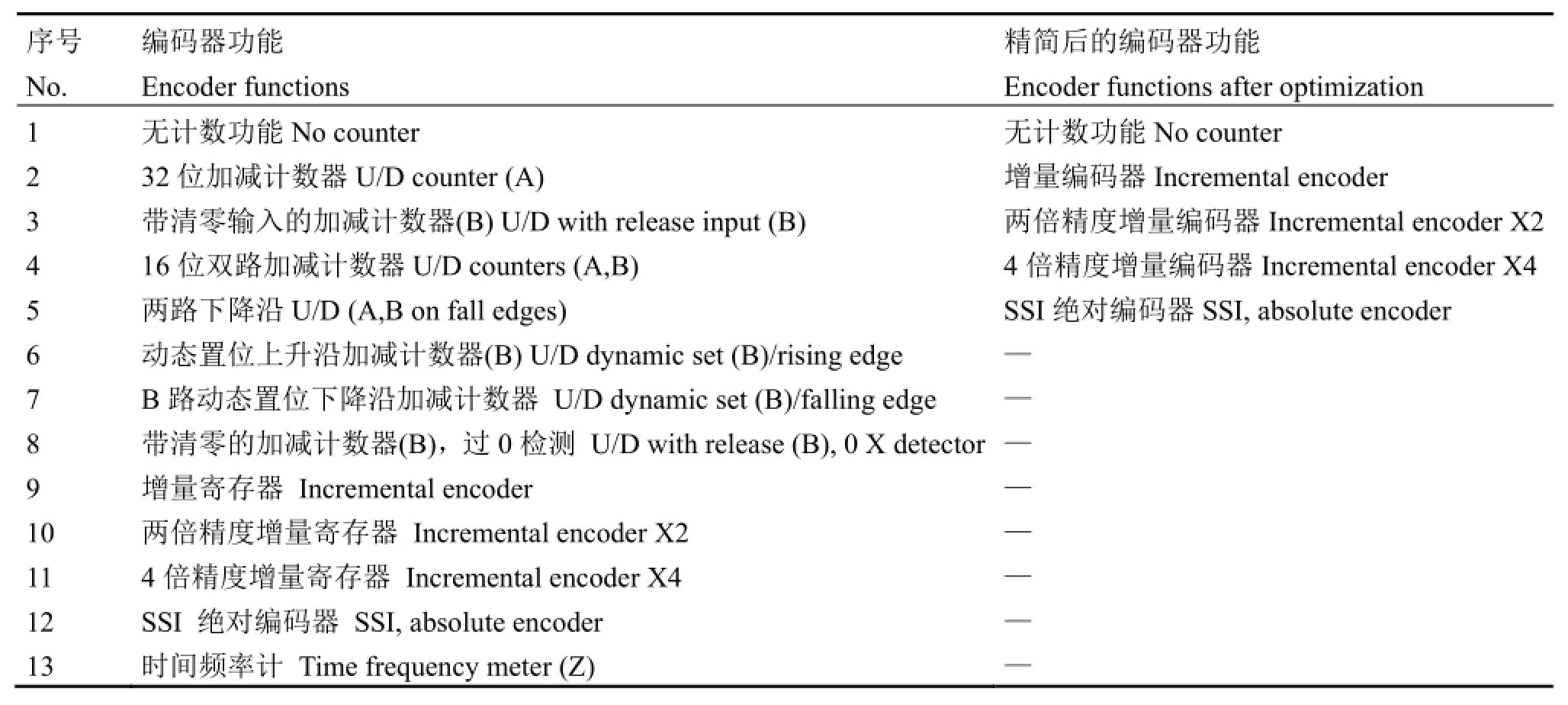
表1 编码器功能优化前后对比Table1 Encoder functions before and after optimization.
GSD文件只提供了I/O寄存器地址,对I/O寄存器的功能没有分配。参考CD522使用说明书《Encoder & PWM Module CD522》[3]对模块的24个字节的输入(反馈状态)和36个字节的输出(控制命令)进行了配置。表2是编码器1状态字及控制字功能分配,表3是脉冲输出模式状态字(I)和控制字分配(Q)。
功能参数精简和输入输出寄存器的地址分配完成后,可以将CD522模块集成到ABB PLC的组态编程软件CB (Control Buider)中。组态方式如图2,冗余的控制器PM861通过接口共享模块BC810与冗余的Modbus/TCP通信模块CI854和冗余Profibus-DP通信模块CI867相连。主控制器PM861通过冗余电缆与备用控制器实现互为冗余,同样共享接口模块BC810也通过冗余电缆互为冗余。对控制器来说冗余的通讯模块通过BC810实现共享,即每个控制器都可以单独访问到冗余的通讯接口。这种设计实现了控制器和通讯接口的相互独立,也就是说控制器故障切换时不会引起通讯接口的切换,反之也成立。不仅冗余切换对系统造成的扰动小,而且各级冗余配置选择更加灵活。从CB软件组态也可以观察到这种组态结构时PM861 (Up/Low)、CI867(总线位置1/7)、CI854(总线位置2/8)冗余配置并相互独立。

表2 编码器1状态和控制字功能分配Table 2 Functions allocation of encoder 1.

表3 脉冲模块1状态和控制字功能分配Table3 Functions allocation of pulse module 1.
远程I/O DI810、DO810、AI810通过接口模块CI840连入线冗余Profibus-DP网络。步进电机控制器通过RLM (Redundant Line Manager)模块以及接口模块CI542连入线冗余的Profibus-DP网络,实现基于Profibus-DP 网络的组态。AC800M能实现从控制器到I/O模块的冗余,未来我们会做步进电机控制器的冗余方面的研究。
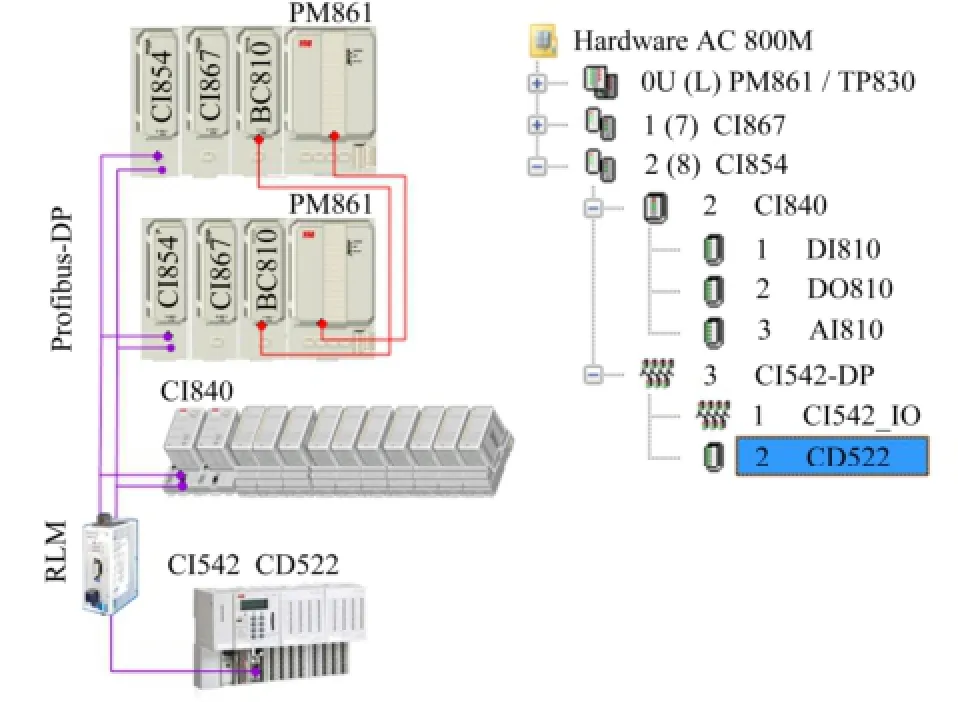
图2 PLC系统组态结构Fig.2 PLC system configuration diagram.
2 旋转变压器输入及脉冲输出
CD522可单独实现对电机的开环控制,配合旋转变压器等位置传感器可组合成闭环控制系统。另外,CD522可根据编码器数据传输方式实现绝对编码函数,从而得到控制棒运行过程的绝对位置信息。
旋转变压器(“旋变”)以其在恶劣环境(高温、高辐照)下工作的可靠性被选为CRDM的行程位置传感器。棒位系统设计方案中,每一根控制棒均设有三组旋变,分别位于链轮链条型驱动机构三个减速点,以进行位置校正;每组旋变均设有精确测量和粗略测量两个旋变,提供不同精度的测量值,同时也可以进行互相校正,以防脉冲丢失[4-5]。
CRDM中选用的行程位置传感器是多摩川TS2640N321E64型无刷内置型旋变,其抗恶劣环境的能力体现在定转子间的磁耦合,不涉及任何机械电气连接。旋变输出的正余弦信号经过解码芯片转换成数字信号以串行方式、并行方式或者脉冲形式的ABZ方式输出(如图3),进而连接到CD522的计数功能部分。旋转输出信号经不同的解码方式和输出方式可输出绝对位置信息或相对位置信息。
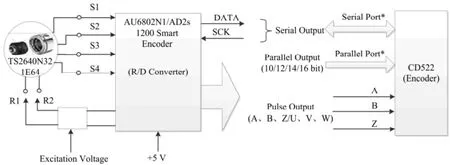
图3 旋变的解码结构框图Fig.3 Decoding block diagram of the resolver.
进行了控制函数的编辑,主要包括32位相对编码函数“CD522_32BIT_Encoder”和脉冲输出控制函数“CD522_PULSE_OUT”。“CD522_32BIT_ Encoder”实现编码器使能、置数、归零、计数工程量的转换等功能;“CD522_PULSE_OUT”实现脉冲输出使能控制、速度/频率转换、行程/脉冲数转换等功能。图4是CD522驱动脉冲输出结果。

图4 CD522 10 Hz脉冲输出结果Fig.4 10-Hz pulse output of CD522.
步进电机运行一周带动棒体运动48.45mm,编码器产生4096个脉冲计数,位置分辨率可达12μm。CD522脉冲输出频率为1-15kHz,棒体运动速度可达291mm.s-1(驱动器细分值为5 000),满足棒体正常运动10mm.s-1的速度要求。最大输出脉冲数是65535,为满足1800mm的形成需要循环重复输出脉冲。
3 系统可靠性分析
可靠性分析为控制系统的完整设计提供可靠度指标,具有重要的工程应用意义[6]。可靠度是指设备或系统在规定条件和时间内完成规定功能的概率。在工程应用中,可靠度通常表现为时间的指数分布:

式中,λ是设备或系统的故障率。
实际应用中,可靠度通常由硬件的可靠性框图来计算,而可靠性框图则基于硬件之间的串并联连接关系。该组态系统的硬件可靠性框图如图5所示,而各设备单元的故障率参数通常由厂家提供,表4是系统中各模块单元的故障率参数。

图5 系统可靠性框图Fig.5 Block diagram for system reliability.

表4 各模块单元的故障率参数Table4 Failure rate parameters for each module unit.
由图5的可靠性框图及表4的模块故障率参数,可以得到该硬件系统的可靠度与失效率表达式为:

对可靠度和失效率进行计算和仿真,可得如图6中1年内(0<t<8760 h)可靠度R(t)和失效率λs(t)与时间的关系。由图6中仿真曲线可知,组态CD522系统在1年内的可靠度呈近似线性下降趋势,而失效率曲线变化始终维持在1.2×10-5数量级,表明系统稳定性和可靠性较好[8]。
在10年内(0<t<87600h)进行曲线仿真,可发现系统的可靠度会明显地呈指数趋势下降,但其失效率曲线变化依然不明显,还是维持在1.2×10-5以下,从而说明在实际应用中,需确定定期维护的时间来避免可靠度过快下降,使系统可靠性参数维持在一定水平范围内[9]。

图6 系统可靠度(a)、失效率(b)与时间(0<t<8760 h)的关系Fig.6 Time-dependent system reliability (a) and failure rate (b) (0<t<8760 h).
4 结语
通过步进电机控制模块CD522基于Profibus的组态,实现了棒控、棒位系统中两个关键功能:驱动步进电机脉冲源控制以及位置探测器旋转变压器的位置信号解码。为ABB PLC在整个反应堆控制系统中的应用打下了基础。ABB PLC广泛用于电力行业以及反应堆控制系统中,它冗余功能的优势体现在各个模块实现冗余功能相对独立,如CPU冗余、接口模块冗余都能单独实现。这种对上下层透明的冗余结构决定了其切换时对系统造成的扰动最小,具有较高的可靠性。通过对棒控棒位硬件结构的可靠性数学分析,证明基于CD522的硬件组态故障率可以维持在一个非常低的水平。另外CD522的各项性能参数满足棒控、棒位系统行程、速度、控制精度、位置探测精度等各项指标要求。
1 魏利强, 马涛, 陈晓明, 等. HTR-10数字化运行仪表与控制系统更新设计[J]. 原子能科学技术, 2011,45(9): 1093-1099
WEI Liqiang, MA Tao, CHEN Xiaoming, et al. Design on HTR-10 digital operation instrumentation and control system updating[J]. Atomic Energy Science and Technology, 2011,45(9): 1093-1099
2 卢勇, 杨溪林, 张云贵. GSD文件实现DP从站自动组态[C]. 全国冶金自动化信息网2008年年会论文集, 2008: 524-527
LU Yong, YANG Xilin, ZHANG Yungui. Use GSD file to achieve automatic DP slaveconfiguration[C]. NationalMetallurgical Automation Information Network 2008 Annual Conference Proceedings, 2008: 524-527
3 Encoder & PWM module CD522[EB/OL]. http://www. vaeprosys.cz/dokumentace/ac500/English/CHM-Files/CA A-Merger-2/S500-FBP/Encoder+PWM-Modules/CD522. htm, 2012
4 袁润, 刘延山. 高温气冷堆用控制棒位置指示器的可靠性设计[J]. 江苏理工大学学报, 1997,18(1): 65-69
YUAN Run, LIU Yanshan. Reliability design of position indicator for control rod driving system in high temperature gas cooling reactor[J]. Journal of Jiangsu University of Science and Technology, 1997,18(1): 65-69
5 张冰蔚, 刘延山. 10 MW高温气冷试验堆控制棒驱动系统结构设计[J]. 江苏理工大学学报, 1994,15(1): 61-67
ZHANG Bingwei, LIU Yanshan. The 10 MW high temperature gas cooled test reactor control rod drive system design[J]. Journal of Jiangsu University of Science and Technology, 1994,15(1): 61-67
6 Zio E. Reliability engineering: old problems and new challenges[J]. Reliability Engineering and System Safety, 2009,94: 125-141
7 ABB. Technical specification controller AC 800M SV5.x reliability data sheet[OL]. http://new.abb.com/controlsystems, 2014
8 Wang Q Q, Li Y P, Han L F, et al. TMSR single control rod drive mechanism control system and its reliability analysis[C]. 2ndInternational Conference on Measurement, Information and Control, Harbin, China, 2013: 737-741
9 汪全全, 尹聪聪, 孙雪静, 等. TMSR核功率控制系统的PID设计与仿真[J]. 核技术, 2015,38(2): 020601. DOI: 10.11889/j.0253-3219.2015.hjs.38.020601
WANG Quanquan, YIN Congcong, SUN Xuejing, et al. PID design and simulation of TMSR nuclear power control system[J]. Nuclear Techniques, 2015,38(2): 020601. DOI: 10.11889/j.0253-3219.2015.hjs.38.020601
Implement the step motor controller of ABB CD522 for RCPI system
HAN Lifeng1,2WANG Quanquan1,2DENG Huiyu1,2WEI Yongbo1,2CHEN Yongzhong1,2LIU Guimin1
1(Shanghai Institute of Applied Physics,Chinese Academy of Sciences,Jiading Campus,Shanghai 201800,China)
2(Key Labs of Nuclear Radiation and Nuclear Energy Technology,Chinese Academy of Sciences,Shanghai 201800,China)
Background:The architecture of the control system for the solid fuel molten-salt reactor (TMSR-SF) is based on the ABB’s 800XA series programmable logic controller (PLC) hardware. The 800XA series PLC is widely used in the power industry due to its unique reliable design, but there is a lack of step motor controller which is the key component for control rod drive mechanism (CRDM).Purpose:This study aims to configurate a ABB AC500 step motor controller CD552 into the 800XA series PLCs to realize stepper motor driven pulse output and position detector inputs decoding. This is a key module for reactor Rod Control and Position Indicator (RCPI) system.Methods:The Proifbus-DP interface of the 800XA series PLCs is adopted to connect the step motor controller CD522 via its CDI 542 module. The plug and play (P&P) functionality of CD552 is achieved and optimized to work coherently based on Proifbus-DP. During the configuration of the controller, by a flexible input and output registers assignment, it not only achieves custom controller function, but also simplifies the subsequent library programming.Results:Two main functions of RCPI were implemented with a very low failure rate at the level of 8×10-6by analyzing of the reliability of the hardware’s configuration based on CD522.Conclusion:Such kind of hardware configuration and software optimization can meet various performance parameters of the RCPI system, such as travel stroke, speed control required accuracy and position detection precision, etc.
TMSR, CD522, RCPI, Reliability analysis, Profibus-DP
TL362+.5
10.11889/j.0253-3219.2015.hjs.38.090404
中国科学院战略性先导科技专项(No.XDA02010300)资助
韩利峰,男,1981年出生,2009年于中国科学院上海应用物理研究所获博士学位
陈永忠,E-mail: chenyongzhong@sinap.ac.cn
2014-03-10,
2014-11-05
CLCTL362+.5
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
有色金属设计(2022年4期)2022-02-04
河北农机(2020年10期)2020-12-14
计算机应用(2020年5期)2020-06-07
成都信息工程大学学报(2018年3期)2018-08-29
凿岩机械气动工具(2017年2期)2017-07-19
西安工程大学学报(2016年6期)2017-01-15
工业设计(2016年11期)2016-04-16
探测与控制学报(2015年4期)2015-12-15
中国铸造装备与技术(2015年5期)2015-12-10