基于协进化粒子群算法的齿轮传动优化
2015-12-31 09:12谢能刚
重庆理工大学学报(自然科学) 2015年8期
汪 超,王 璐,谢能刚,洪 洁
(安徽工业大学 机械工程学院,安徽 马鞍山 243002)
基于协进化粒子群算法的齿轮传动优化
汪超,王璐,谢能刚,洪洁
(安徽工业大学 机械工程学院,安徽 马鞍山243002)
摘要:针对多约束条件下的行星齿轮传动方案,采取协进化粒子群算法进行优化,并结合其算法特点建立了特有的罚因子评价机制。实际算例表明:该方法合理、有效,计算效率高,为行星齿轮优化方案提供了一个新的求解途径。
关键词:协进化粒子群算法;行星齿轮传动;约束优化
行星齿轮是机械传动的一个重要机构,广泛应用于工业生产、航天航空以及车辆工程等领域。合理优化齿轮参数可以提高其传动性能,因此学者们利用复合型法、二次规划法和内点法等现代优化设计方法对大型行星齿轮、NWG齿轮以及多级行星齿轮进行了参数优化,并取得一定的成效[1-3]。现代设计方法优化性能的优劣取决于初始点选取的好坏,而群智能算法如粒子群算法、遗传算法等可以从随机初始点出发,不断向最优点进化。文献[4-5]应用遗传算法对NWG齿轮传动进行优化。文献[6]应用带有权重的粒子群方法对2K-H型齿轮进行优化,发现粒子群收敛速度更快。行星齿轮的结构复杂,致使数学模型的约束条件复杂。就目前智能算法而言,一般利用罚函数法将目标函数转化为无约束公式进行优化。尽管文献[4]提出了动态罚因子设置,但是使用仅与代数成一定比例关系的罚函数也不尽合理。因此,本文提出协进化粒子群算法,它不仅考虑了目标函数的优化,又兼顾了罚因子在每次寻优过程的变化。通过实例分析可以看出,这种算法收敛快、效率高。
1协进化粒子群算法
1.1 粒子群算法
粒子群算法[7]是由Eberhart博士和Kennedy博士与1995年提出。该算法是受鸟群觅食行为启发构思出的一个随机性算法,简单且高效。在该算法中种群粒子根据当前最优值和全局最优值迭代进化,迭代公式如下:
(1)
(2)
1.2 协进化粒子群算法
协进化粒子群算法[8]的基本原理是将种群分成多个子种群,子种群相互独立,但同时又相互共享信息。其优点是各子种群不仅借助于外界信息朝有利方向进化,又同时传递有效经验给其他种群,避免陷入局部最优。
协进化粒子群算法[9]包含两类种群:Swarm1和Swarm2。Swarm1用于决策解的进化,它由M1个子种群Xj组成,Xj又包含M2个微粒子,每个粒子代表一个可行解。Swarm2用于罚因子进化,其规模为M1个微粒子yj。
1.3 目标评价函数
针对多组约束条件的优化问题,需要将违反约束条件的量与程度考虑其中。设置函数如下:
Fi(x)=fi(x)+sum×w1-num×w2
(3)
式中:fi(x)表示优化问题的目标函数;w1,w2为罚因子;sum为违反约束的总量;num为违反约束的个数。sum按式(4)进行计算。
(4)
式中maxGi(xj)表示K代所有粒子对i个约束的最大违反量。这样可以保证每个约束反量的归一化处理。
1.4 罚因子的评价函数
若Xj中至少一个有效粒子yj(可行解),则评价函数如下:
(5)
式中num_fit为有效解的个数。可以看出,num_fit数量越多,P(yi)越小。
若Xj中没有一个可行解,有可能是罚函数数值过小导致,则按式(6)进行评价。
(6)
式中max(F)表示种群所有有效粒子的最大评价函数值。
1.5 协同粒子群算法流程
步骤1根据变量范围随机生成Swarm1和Swarm2。
步骤2利用yj对应的罚函数算出Xj对应的适应度,并利用粒子群基本的更新公式进化K代下的Xj。
步骤3根据Xj所有解的优劣,得到评价函数评价罚因子yj。此后,yj根据评价数值的大小,利用粒子群算法进行进化,得出新的yj。
步骤4在下一代协同进化中,如没有达到指定的循环次数,则返回步骤2;否则执行步骤5。
步骤5将进化过程中整个种群中Xj历史最优解Gbest输出,此时对应的罚因子也为最佳罚因子。
2齿轮传动模型
2.1 设计变量
本文以NGW行星齿轮为例展开研究。NGW行星齿轮结构如图1所示。设计变量为太阳轮齿数Za,行星轮齿数Zc,以及分别对应的变位系数xa和xc。齿宽B、模数m、太阳轮与行星轮之间的啮合角、行星轮和内齿圈啮合角作为设计变量,即⎣Za,Zc,B,m,xa,xc,αac,αbc」。
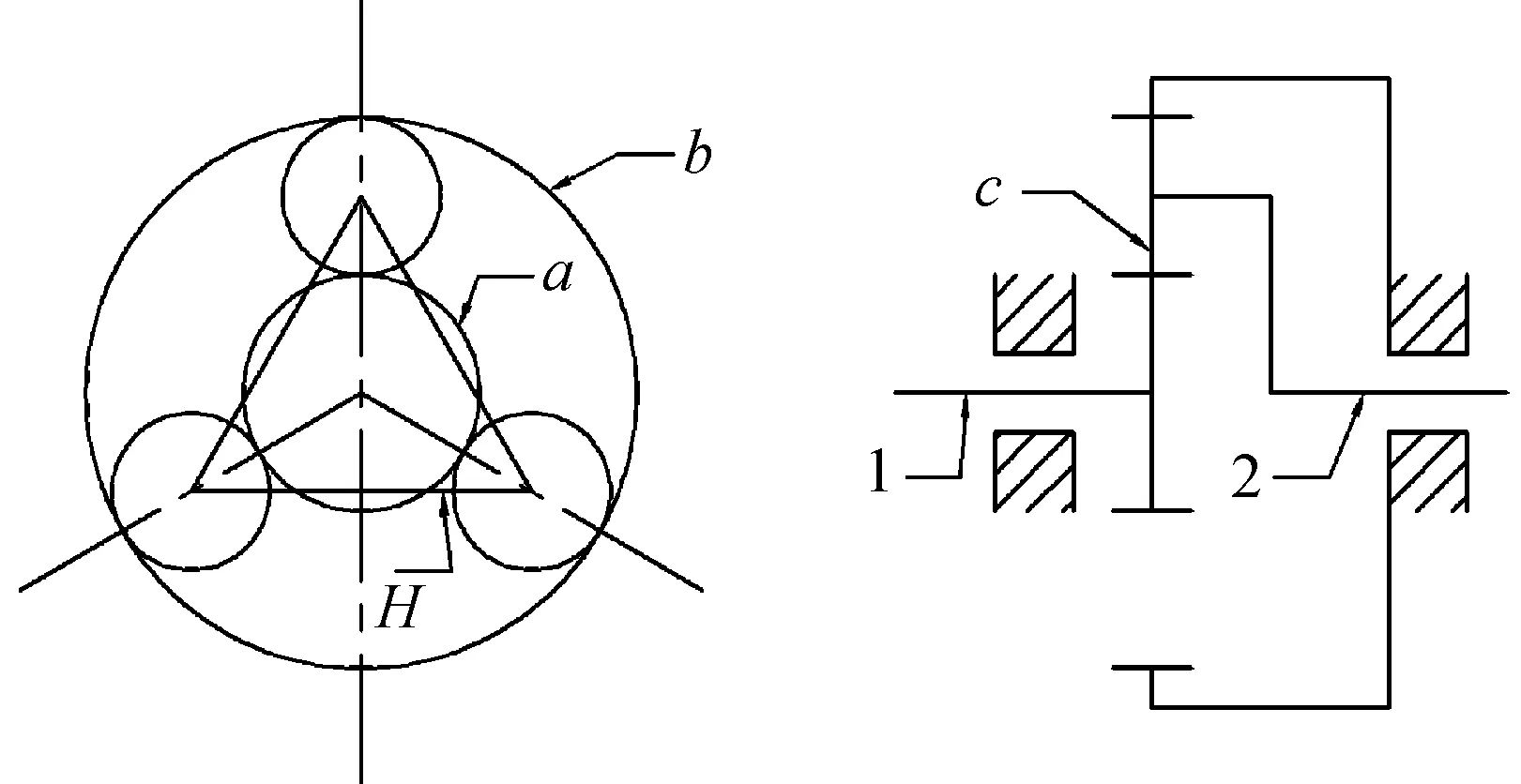
a.太阳轮;b.内齿圈;c.行星轮;H.行星架;
2.2 目标函数
由于行星齿轮传动方案数学模型复杂,鉴于篇幅有限,仅给出重要公式,具体推导和部分参数说明可参考文献[10]。
2.2.1体积
为减少加工成本,尽量使齿轮的体积最小。体积表达式为
(7)
2.2.2重合度
一般而言,齿轮重合度越大,啮合的对数越大,传动越稳定。推导后重合度最终表达式为
(8)
2.2.3传动效率
齿轮传动效率是传动性能的重要评价指标之一,提高传动效率对设计者有着十分重要的意义。齿轮传动功率损失由啮合摩擦损失、轴承摩擦损失以及运行时润滑油泄露损失组成,其对应的效率分别为ηm,ηn和ηs。通常情况下ηn为0.98,ηs为1 。
(9)
(10)
其中:
(11)
f取值2.3,μ取值0.1,得出最终传动效率公式为
(12)
2.3 约束条件
2.3.1邻接条件
为避免相邻行星齿轮碰撞,其间隙必须保证大于0.5模数。可知:
(13)
2.3.2同心条件
太阳轮内齿圈、行星轮之间的旋转轴必须与其主轴相重合。通过相关计算推导出:
(14)
2.3.3安装条件
3个行星齿轮必须分布均匀,各个齿轮必须满足:
(15)
2.3.4无侧隙啮合几何条件

(16)
由齿宽限制得齿宽系数公式:
(17)
太阳轮齿顶厚:
(18)
行星齿轮齿顶厚:
(19)
2.3.5啮合不干涉条件
对于小齿轮,则有:
(20)
同样,对于太阳轮则有:
(21)
2.3.6疲劳强度条件
对于齿面接触疲劳强度条件:
(22)
对于齿根完全疲劳强度可行度条件,太阳轮为
(23)
行星轮为
(24)
3算例分析
本文采用文献[6]的NGW行星齿轮进行算例分析,设定转速为n=750r/min,功率为10kW,α=20°,传动比i=7.6。对于协进化粒子群参数,本研究设置最大迭代次数为100,M1为50,M2为100。
通过常规的设计经验可知体积 f1m一般为 957 550mm3,重合度 f2m为1.339 5,效率f3m为0.959。为了使个目标函数统一量纲,将3个目标值利用权重法转化为单目标函数:
(25)
按照协进化粒子群算法流程进行齿轮传动优化设计,优化结果如表1所示。其中,优化种群适应度的进化图(图2)和罚因子适应度进化图(图3)中的F与Y最终达到最优的代数不一致,这是因为协进化粒子群算法既关联又相互独立的算法特征决定的,即适应度F最小值对应的惩罚因子w1和w2不一定是罚函数适应度Y的最优值。
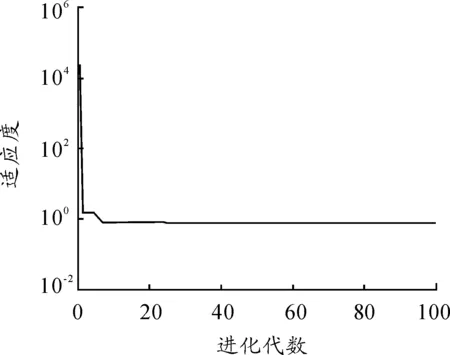
图2 目标函数F进化图
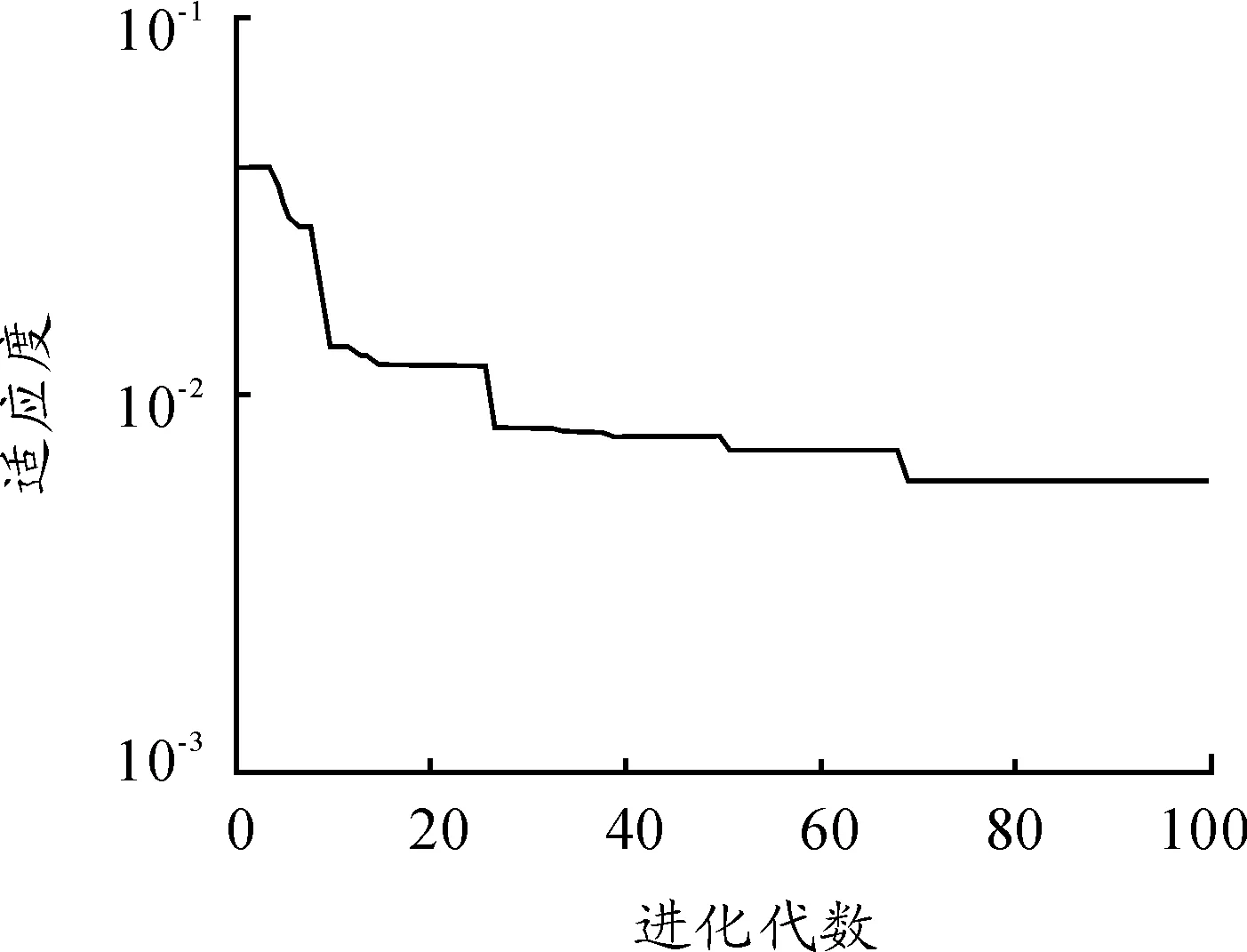
图3 罚因子适应度Y进化图
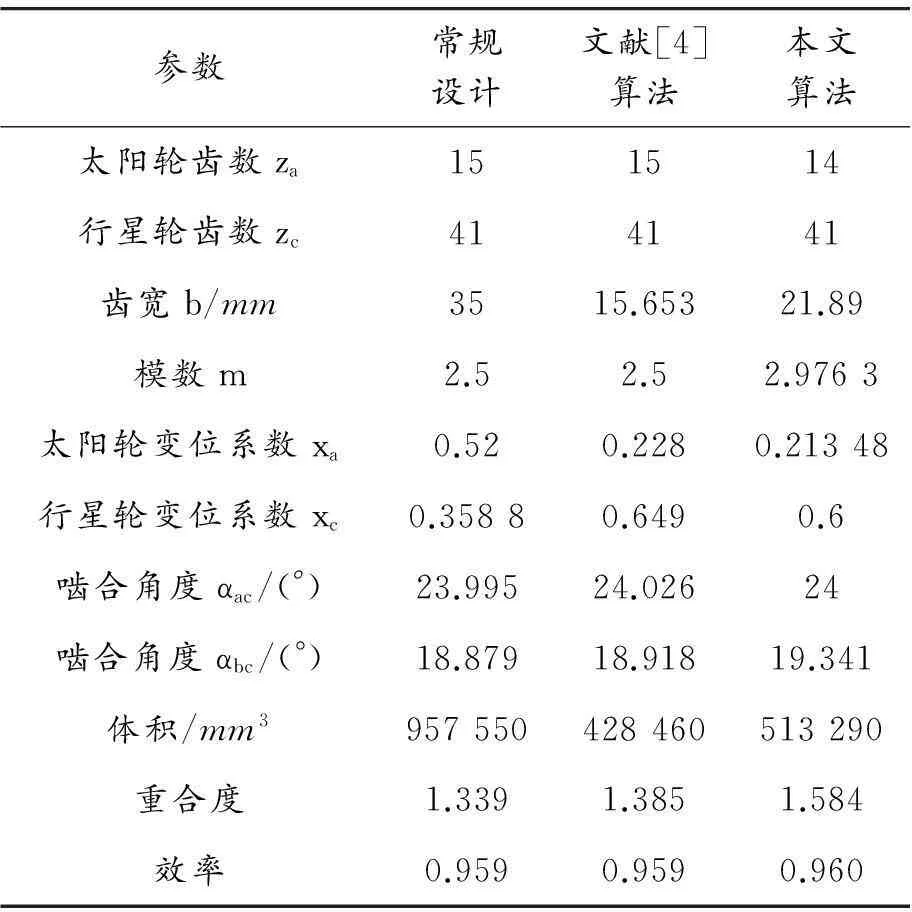
表1 行星齿轮优化结果
通过表1可以发现:本文提出的算法比常规设计体积减少46.4%,重合度增加18.3%,效率提高0.1%。相对于文献[4]的结果,尽管体积偏大,但是重合度增加14.4%,效率提高0.1%。
4结束语
协进化粒子群算法是一种适合处理多约束条件的高效仿生算法。本文将该算法应用到行星齿轮传动方案优化中。结果表明,其进化速度快,优化的齿轮参数合理、有效。该研究成果为复杂环境下的齿轮传动方案优化提供了一个新的途径。
参考文献:
[1]王安麟,蒋涛,昝鹏宇,等.大型齿轮传动机构可靠性设计的多目标优化[J].中国工程机械学报,2009,7(3):253-257.
[2]蒿丽萍.多级行星轮系多目标模糊可靠性优化设计[J].机械传动,2015,39(1):87-91.
[3]江家伍,印崧.NGW型行星减速器的模糊可靠性优化设计[J].合肥工业大学学报,2002,25(6):472-476.
[4]张东浩,吴凤林,张世同,等.改进遗传算法在NGW行星齿轮传动可靠性优化设计中的应用[J].机械传动,2013(2):44-46.
[5]吴玉国,宋崇智,谢能刚.遗传算法在行星齿轮多目标模糊优化设计中的应用[J].机械传动,2007(1):48-49.
[6]舒服华.改进粒子群算法在行星传动设计中的应用[J].机械传动,2006(3):54-45.
[7]EberhartRC,KennedyJ.Anewoptimizerusingparticleswarmtheory[C]//Proc6thIntSympMicroMachineandHumanScience.Nagoya,Japan:[s.n.],1995:39-43.
[8]PoettrMA,DeJongKA.Cooperativeco-evolution:Anacrhitectureofrevolvingcodapatedsubcomponents[J].EvoluitonaryComputation,2000,8(l):l-29.
[9]BerghF,EngelbrechtAP.Acooperativeapproachtoparticleswarmoptimization[J].IEEETransonEvolutionaryComputation,2004,8(3):1-15.
[10]张东浩.NGW行星齿轮传动可靠性优化设计及其动力学仿真[J].太原:太原理工大学,2013.
(责任编辑刘舸)
收稿日期:2015-04-28
基金项目:国家自然科学基金资助项目(61375068);安徽省高等学校省级自然科学研究重点项目(KJ2013A056)
作者简介:汪超(1985— ),男,安徽马鞍山人,硕士,助理实验师,主要从事信号处理、运动仿真等研究;王璐(1976—),男,北京人,副教授,硕士生导师,主要从事信号故障诊断、计算机仿真等方面研究。
doi:10.3969/j.issn.1674-8425(z).2015.08.008
中图分类号:TH13
文献标识码:A
文章编号:1674-8425(2015)08-0038-05
GearTransmissionOptimizationBasedonCo-Evolutionary
ParticleSwarmAlgorithm
WANGChao,WANGLu,XIENeng-gang,HONGJie
(SchoolofMechanicalEngineering,AnhuiUniversityofTechnology,Maanshan243002,China)
Abstract:On the basis of planetary gear transmission plan that under the multi-constraints, using this co-evolutionary particle swarm algorithm, combined with its algorithm characteristics, special establishment of penalty factor evaluation mechanisms was adopted. Ultimately, this method was proved to be reasonable and effective through practical examples. And its high efficiency witnessed a novel approach to the optimization of planetary gear.
Key words:co-evolutionary particle swarm algorithm; planetary gear transmission; constrained optimization
引用格式:汪超,王璐,谢能刚,等.基于协进化粒子群算法的齿轮传动优化[J].重庆理工大学学报:自然科学版,2015(8):38-42.
Citationformat:WANGChao,WANGLu,XIENeng-gang,etal.GearTransmissionOptimizationBasedonCo-EvolutionaryParticleSwarmAlgorithm[J].JournalofChongqingUniversityofTechnology:NaturalScience,2015(8):38-42.