井下视像技术在鲁迈拉油田大斜度井修井作业中的应用
2016-01-07 01:24占焕校,冀成楼,崔可平等
非常规油气 2015年2期
井下视像技术在鲁迈拉油田大斜度井修井作业中的应用
占焕校,冀成楼,崔可平,索明武
(中国石油伊拉克公司鲁迈拉项目作业部,北京 100120)
摘要:井下视像技术可获得直观、清晰的井下井筒图像,有助于快速识别井况并为后续作业提供相关信息和依据。针对鲁迈拉油田大斜度井在修井作业过程中存在的小井眼井筒尺寸限制、井况复杂、难以掌握井底实际情况等作业难题,引入了井下视像新技术,从作业管柱内下入井下视像工具对井筒进行实时检测和分析。多个方面的现场应用实例表明,井下视像技术在大斜度井的井筒检测、井况分析及打捞作业诸方面能够有效提高诊断精度及作业效率,缩短作业周期,降低作业成本。同时,井下视像技术对于观测井底落鱼及管柱损坏情况、检查射孔质量及分析井筒损坏机理等工作均具有一定的指导意义。
关键词:井下视像技术;大斜度井;修井作业;鲁迈拉油田
中图分类号:TE358
作者简介:第一占焕校(1983年生),男,硕士,工程师,2008年毕业于中国石油大学(华东),现主要从事修井工程及现场作业协调管理工作。邮箱:zhanhuanxiao@cnpcint.com。
Application of Downhole Video Technology to High Angle Well
Workover in Rumaila Oilfield
Zhan Huanxiao, Ji Chenglou, Cui Keping, Suo Mingwu
(PetroChinaIraqFZEInternational,Beijing100120,China)
Abstract:Downhole video technology can provide valuable wellbore information for the forward operations with its timely clear and stable images. In order to solve the downhole technical problems of wellbore diameter’s limitation and complex underground condition during workover operation in high angle well, the downhole video technology was introduced to obtain the necessary downhole wellbore real-time information in Rumaila Oilfield. The field applications showed that downhole video technology could provide an effective method to improve diagnostic accuracy and work efficiency, reduce operation time and cut the overall cost of workover operations in high angle well. The application also had a good guiding significance for investigating downhole fish or tubular condition, detecting perforation quality and analyzing the mechanism of wellbore damages.
Key words: downhole video technology; digh angle well; workover operation; Rumaila Oilfield
鲁迈拉油田现有1000多口油水井,经过40多年的开发,受油藏压力递减、水层推进及部分井底H2S、CO2腐蚀介质的影响,油田部分老井因井筒完整性问题而停产,如套管腐蚀穿孔、作业或完井管柱断脱坠井、井口设备严重腐蚀、井口及方井周围出现的气体或液体溢流等,需要进行打捞落鱼、挤水泥封堵漏失套管段、隔离水层或重新射孔等修井作业。在修井作业过程中,高效完成井下作业的前提:在作业前,尽可能全面地掌握井底情况和井史资料,同时在作业过程中正确地分析和判断井下状况并发出高效的作业指令。大部分老井因年代久远,井史资料大多无从查起,加之井筒受腐蚀、挤压变形等影响,难以获知实际井筒信息。在后期修井过程中通常需要采用下测井电缆、封隔打压、铅模打印等多种措施,以期获得井筒的详细资料和数据,为制订下一步的作业计划和方案提供依据。此外,油田还存在数十口采用小井眼尾管(如φ114mm套管)完井的大斜度开采井,井深普遍在3300m左右、造斜点在2200m以上。在修井作业中,管柱受尾管井筒内径及井眼曲率的限制及摩擦力、附加轴向力的作用[1-5],井下工具极易在小井眼大斜度井段内遇卡,作业难度更大,起下作业工具时间更长,且采用常规测井、铅模打印等方法难以获知复杂的井底情况及井壁形态。早期有部分小井眼大斜度井在多次铅模打印无结果后不得不采取暂时弃井措施。
井下视像技术图像直观清晰、实时性好、作业成本较低[6-9],在近两年来在鲁迈拉油田大斜度井的井筒形貌检测、井下落鱼打捞、射孔质量检测等方面获得了良好的现场应用效果。对井筒井壁及井底图像的分析判断,有助于工作人员正确判断井况并为制订后续施工方案提供可靠依据。目前,井下视像新技术在诊断鲁迈拉油田大斜度井的井下复杂情况时得到了大范围的应用。
1 井下视像系统
井下视像系统可实现在井下预定位置进行摄像并将图像传送回地面接收装置,通过分析图像实现对井筒状况的实时监测。目前主要存在4类井下视像系统,分别是光纤电缆视像系统、同轴视像系统、单芯电缆视像系统和鹰眼视像系统。其中,鹰眼视像系统以其携带方便、可在井底连续移动、图像信息质量高及适应性强等优势而被广泛应用于各类复杂的井下作业中。
1.1 构成
井下视像系统由井下摄像设备及地面接收设备构成。井下摄像设备主要包括井下摄像头、照明装置、电子装置和扶正器等(图1);地面接收设备主要由地面控制器、应用软件及笔记本电脑组成。这两种设备之间通过普通测井电缆进行连接并传输信号。
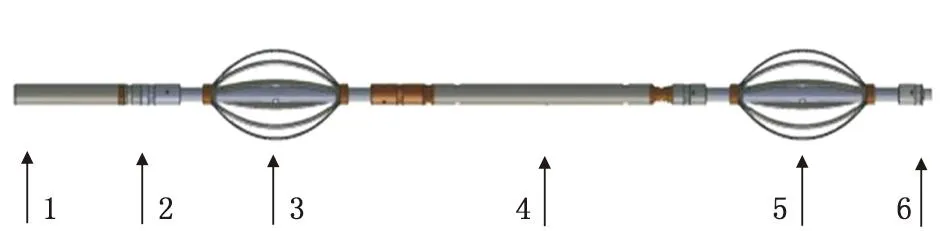
图1 井下摄像设备结构示意图 Fig.1 Schematic diagram of downhole video equipment 1—井下摄像头;2—照明装置;3—扶正器; 4—电子装置;5—扶正器;6—电缆
1.2 工作原理
井下视像系统主要利用光学成像原理,用测井电缆将井下摄像头及照明装置等组件下入井底预设位置后,通过地面控制器调节照明装置LED灯的强度及井下摄像头的旋转角度进行摄像,并可在电缆的下降过程中快速采集下向或侧向视图(帧频为1~30f/s),所拍摄的分组图像数据经压缩和编码调制后通过测井电缆传输到地面控制器。经地面控制器解码、解压缩和数模转换后,将原始图像及相关信息显示在监视器或电脑屏幕上。为便于观察和分析,作业过程中选择灰度单帧图像进行保存,并自动生成视频文件,同时还可自动记录拍摄的深度、井斜及方位。所用的井下视像系统主要技术参数如表1所示。

表1 井下视像系统的主要技术参数表
1.3 优点
井下视像技术的最大优点是可提供直观的井底实时图像信息,有助于技术人员快速识别及判断井下问题。与铅模打印相比较,克服了因信息不足而导致的分析失真及后续可能遇到的不当处理方法,节省了作业工时。同时,通过普通测井电缆传输信号,可在较深的井底进行检测,耐压耐温性能良好,耐酸碱腐蚀性强。
2 解决措施
鲁迈拉油田的大斜度井大多采用φ114mm尾管完井(图2),井眼尺寸较小,作业管柱极易在尾管头或小井眼的尾管段内遇阻。此外,井下摄像设备自身的一些工作特点和局限性对修井作业也提出了较高的要求,在一定程度上制约其应用范围。操作过程中需要考虑的主要因素有:
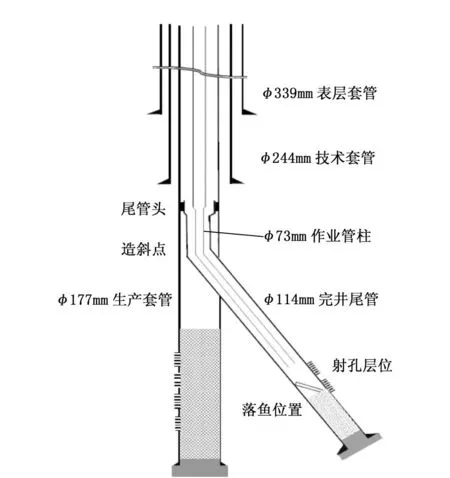
图2 大斜度旧井的井筒及作业管柱示意图 Fig.2 Schematic diagram of high angle well and work string
(1)连接电缆为软索类传输介质,需要靠井底仪器的自重(或加重棒)下入井底,当井斜过大时,则需要借助专用测井爬行器将电缆连同井下摄像设备一起下入大斜度井段。
(2)井下摄像头无法在油相或混浊液体介质中进行观测,对入井液的洁净度要求极高,而油井作业时井筒内一般都存在不透明液体介质,尤其是井底落鱼顶部还可能存在固相颗粒沉积。
(3)φ114mm尾管的井筒尺寸较小,在起下电缆及井下摄像设备时,电缆及井下摄像头难免会刮碰腐蚀或变形的井壁而遇卡,易造成电缆及井下摄像设备受阻或后期作业坠井。
(4)井下视像系统最前端是精密的井下摄像设备,在下入至大斜度井的尾管头及小井眼斜井段时极易因遇阻或撞击而损坏摄像头,或在起出过程中遇阻而与电缆缠结在一起。
针对以上现场作业难题,制订了以下主要解决措施:
(1)在电缆安全张力范围内,将额外的加重棒和井下摄像设备随电缆一同下井,用于增加井下仪器的质量和长度。
(2)尽量保持井筒内井液的洁净度(要求入井液混浊度指标NTU<10)。为获得清晰的井底图像,在下入井下摄像设备前对需要观测井段的井壁进行刮削,降低仪器入井过程中受黏附于井壁的杂质的影响,循环洗井并向井内替置清洁的入井液,必要时可考虑向井内泵入先期替置液(高黏剂和表面活性剂)。同时,为防止密封脂对井液洁净度的干扰,作业管柱下井时仅在外螺纹端涂抹螺纹脂。
(3)为解决井下摄像设备在入井过程中的遇阻问题及便于后续可能的打捞作业,根据鲁迈拉油田修井作业情况,加工了一批配套作业管柱:在保证入井管柱抗拉强度的基础上,在φ73mm VAM TOP油管接箍两端加工20°倒角,并将接箍外径由φ89mm减薄至φ80mm,油管接箍的抗拉及抗压性能均为原来的80%。井下摄像设备从作业管柱内下入井中,避免了与尾管头及原井套管壁接触。
(4)在下入井下摄像设备前应预先了解井底落鱼位置、观测深度、井筒形态,并在接近观测点时减速下放,防止井下摄像设备因撞击而损坏镜头或者遇阻使电缆缠结而无法顺利退出。此外,井下摄像设备在入井及起出过程中,均应按照速度要求操作。
3 现场作业
(1)下入作业管柱到设定位置,管柱缓慢通过φ114mm尾管顶部,并确保专用作业管柱处于造斜井段上。
(2)连接泵压管线与井口阀门并试压。低压2MPa、高压20MPa均稳压10min,试压成功后泄压并做好记录。
(3)泵入1.5倍于井筒容积的压井液进行反循环洗井,确保井筒内的井液清洁,便于摄像头正常工作;泵速为0.5m3/min,泵压为5.5MPa。不洁净的返出液不得重新泵入井筒。
(4)将测井绞车、电缆防喷器及泵车(含泵入接头)安排到位,连接好后按照作业要求对电缆防喷器进行试压。低压1.5MPa稳压 5min,高压10MPa稳压10min;将电缆防喷器的连接活接头与井下摄像设备相连并试压到10MPa。
(5)检查并涂抹镜头表面活性剂,防止油污黏附于镜头与光源灯罩上。连接井下摄像设备并进行功能性测试,确保各个元器件工作正常。
(6)将井下摄像设备连同加重棒及测井电缆下入预定位置后开启光源进行摄像。最大下入速度为45m/min,如果有遇阻情况则减缓至9m/min。若无法获得清晰的井底图像数据,则向井筒内泵入净化处理的压井液;如果摄像头遇阻,则提出重新清洗并涂抹表面活性剂。
(7)作业结束后,起出井下摄像设备。最大起出速度为45m/min,若有遇阻现象则将速度降至15m/min。井下摄像设备在退回到专用作业管柱内时需要控制好速度及上提力,以防遇阻或断脱。
4 典型实例及效果评价
井下视像技术已应用于鲁迈拉油田大斜度井的修井作业,在检查射孔质量、观测井底落鱼及管柱形态、分析井筒腐蚀及受损情况等方面均取得了良好的效果,为后续修井作业方案的快速制订及更新提供了信息和依据。
4.1 典型实例1——Ru162z井
该井造斜点在2330m,φ114mm尾管下到3661m(尾管头位置在2222m),人工井底在3626m。电缆射孔后提出射孔枪时曾在3480m遇阻,随后不久该井停喷,连续油管作业采用铅模打印仅发现一侧存在锋利的划痕,下捞筒打捞且连续油管循环洗井、氮气气举作业均未见效后转入大修作业。将井下摄像设备从作业管柱底端3474m处继续下放至3477m处并拍摄,拍摄到的侧向井壁射孔段图像(图3a),发现之前射孔作业未有效穿透尾管。接入一根短节,循环洗井后再次下入井下摄像设备,在3483m处开启下向摄像头拍摄,显示只有少量沉积物,没有落鱼(图3b)。后续修井施工作业以此为依据,在刮削井壁后直接下入较大口径射孔枪射孔后完井取得成功。
井下视像系统及时发现和解决了原井存在的射孔质量问题,整个起下时间在5小时以内,比下管柱铅模打印方案节约了60多个小时,加快了作业进度,并获得了准确、可靠的井筒信息。
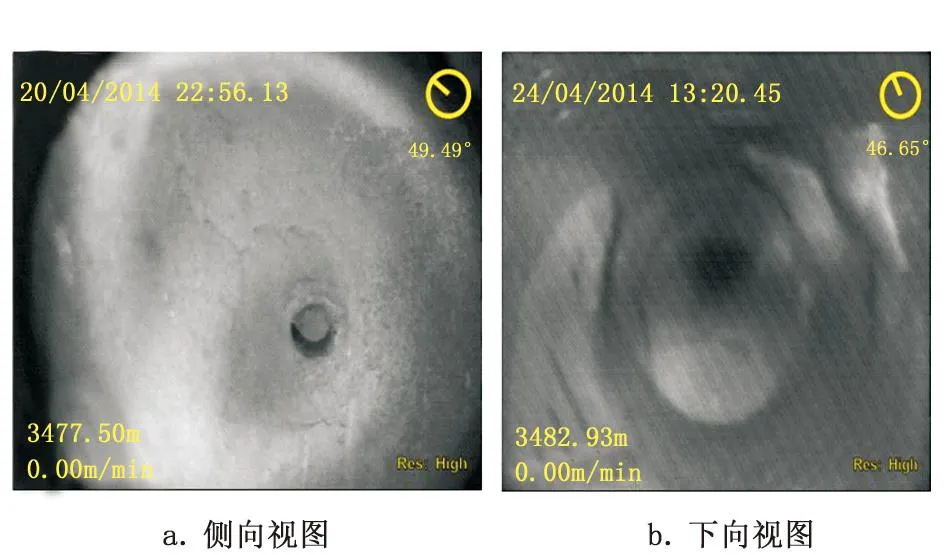
图3 Ru162z井井下视像系统拍摄图像 Fig.3 Downhole video images in Ru162z well
4.2 典型实例2——Ru321y井
Ru321y井是一口大修井,造斜点为2446m,采用φ114mm尾管完井。井底落鱼位置在3213m,包括35mm电缆头、φ54mm×1.5m加重杆、φ54mm×6m射孔枪及约40m残余电缆等。
前期修井下入多次打捞工具均告失败,未发现电缆;下铅模打印显示落鱼顶部没有缠绕太多的电缆线,但在铅模一侧有严重变形(图4a)。井下摄像设备从作业管柱底端3208m处继续下行并拍摄至3210m,观测到落鱼的鱼顶为电缆头(图4b);分析获得的图像信息后下入卡瓦式捞筒、电缆捞矛和平底磨鞋等组合工具打捞出射孔枪、加重杆及残余电缆,循环洗井后射孔并顺利完井。
井下摄像设备的起下作业时间仅为3小时,极大地提高了井底落鱼打捞作业效率。
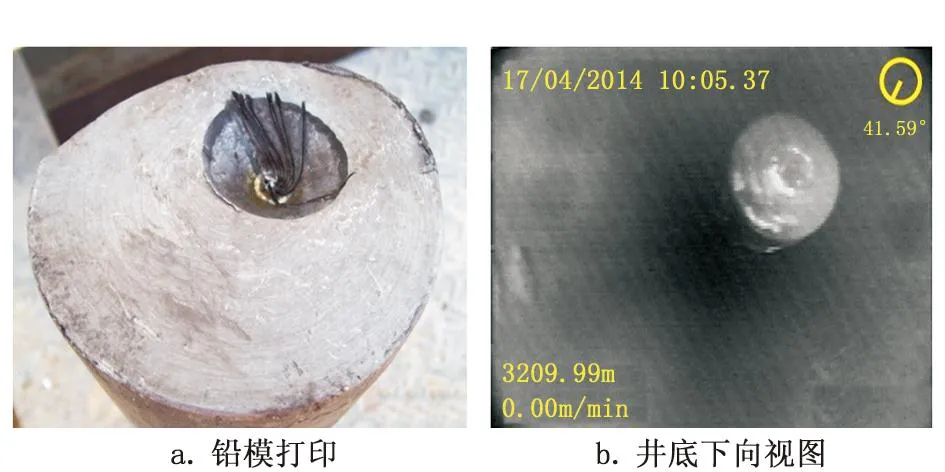
图4 Ru321y井井底落鱼图像 Fig.4 Downhole fish images in Ru321y well
4.3 典型实例3——R488z井
R488z井造斜点为2180m,采用φ114mm尾管完井,原井停喷后转为修井作业,计划由自喷井转为电泵井。修井过程中下入多趟3in铣鞋磨铣,并反循环洗井带出零星的铁屑射孔枪碎片;但向井底泵入高黏剂后,正循环洗井多次出现管柱遇堵现象。为探究井底具体情况,下入作业管柱及井下摄像设备,获得的图像(图5)均表明,射孔位置的套管存在严重的腐蚀穿孔现象。经查明原因是套管腐蚀,而后修订了作业方案,对原射孔段酸洗后重新射孔、完井,取得成功,省去了原作业方案中的刮削、打捞及洗井等多趟试探性工序。
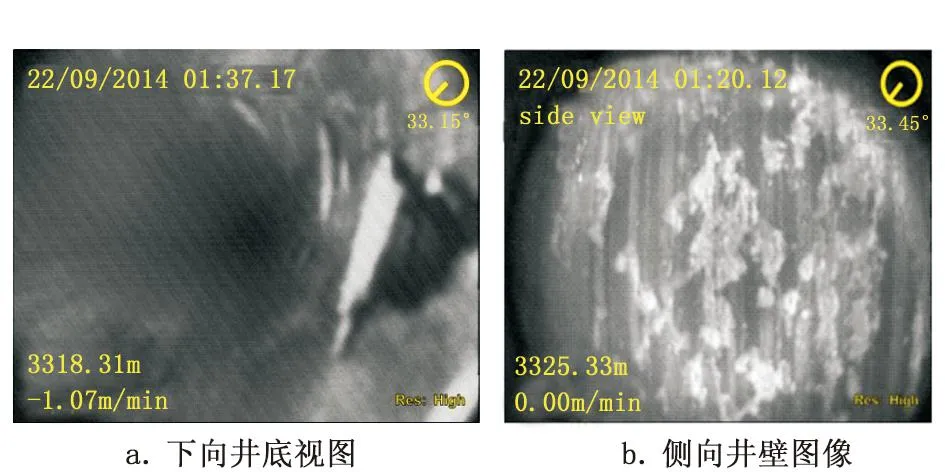
图5 R488z井井下视像系统拍摄图像 Fig.5 Downhole video images in R488z well
5 结束语
(1)井下视像技术在大斜度井修井作业过程中多次应用,效果显著。针对大斜度井修井作业过程中遇到的井下复杂疑难井况,利用井下视像技术能够获得直观、清晰的井底图像,有助于提高对井下井筒问题的分析和处理能力,节约了作业时间及成本。
(2)井下视像系统对入井液的洁净度要求极高,在下入井下摄像设备及操作过程中要尽可能保持井液清洁。若发现设备下行遇阻或者镜头模糊时,应及时取出并清洗镜头。同时,需要避免用井下摄像工具去探落鱼鱼顶并控制其起下速度,防止下放过程中镜头损坏、遇阻,使电缆打结及在上提过程中遇卡。
(3)井下视像系统操作方便,现场工作适应性强,可广泛应用于各类复杂的井下作业,对观测井底落鱼及管柱损坏情况、检查射孔质量、分析井筒腐蚀及损坏机理等方面都有重要指导意义。
参考文献
[1]李文魁,陈建军,王云,等.国内外小井眼井钻采技术的发展现状[J].天然气工业,2009,29(9):54-56.
[2]吴壮坤,谢先平.小井眼修井工艺技术应用研究[J].断块油气田,2007,14(1):83-85.
[3]贾正发,黄德辉,樊震刚,等.侧钻井小井眼内事故处理技术[J].石油钻采工艺,2011,33(5):99-101.
[4]刘永刚,陈春梅.大斜度井中不同管柱下入的可行性分析[J].中国石油和化工标准与质量,2013,(6):67.
[5]李满国,滕立强,党冠,等.小井眼侧钻定向井磨铣打捞技术及应用[J].石油矿场机械,2012,41(10):54-58.
[6]Maddox S D. Downhole video is more than a repair tool [J].Petroleum Engineer International, 1996, 69(5):47-48.
[7]郭嗣杰,孟刚,蔡晓波.井下电视技术的发展和应用[J].舰船防化,2010,(3):6-9.
[8]柴满洲,向绪金,张庆生,等.井下电视测井系统在套管检测中的应用[J].测井技术,2002,26(3):242-246.
[9]张家田,严正国,胡长岭,等.井下视频成像测井技术[J].仪器仪表学报,2007,28(4):714-716.