基于增强微分器的永磁同步电机速度控制研究
2016-01-21 08:43张文安韩瑞祥
浙江工业大学学报 2015年4期
关键词:永磁同步电机
董 辉,高 阳,张文安,韩瑞祥
(1.浙江工业大学 信息工程学院,浙江 杭州 310023;2.浙江金火机床有限公司,浙江 杭州 311400)
基于增强微分器的永磁同步电机速度控制研究
董辉1,高阳1,张文安1,韩瑞祥2
(1.浙江工业大学 信息工程学院,浙江 杭州 310023;2.浙江金火机床有限公司,浙江 杭州 311400)
摘要:为了实现永磁同步电机高精度速度控制,提出一种将自抗扰和增强微分器相结合的新型自抗扰速度控制方法.该方法通过增强微分器提取速度信号,并以此作为系统的输出构造线性扩张状态观测器,对负载扰动和其他噪声进行估计和补偿.避免了常规差分方法带来的噪声放大问题,防止将测量噪声引入线性扩张状态观测器中,影响系统的控制精度.仿真结果表明:新型自抗扰速度调节器相对于PID调节器和普通自抗扰速度调节器,响应速度更快且超调小,尤其在速度测量环节存在噪声和低速情况下,系统控制精度更高.
关键词:永磁同步电机;速度控制;自抗扰控制;增强微分器
近年来,永磁同步电机因为结构简单、高惯性比、功率因数高等优点,被广泛应用于工业调速中[1-2].同时,随着现代工业的发展,在机器人、精密数控、航空航天等高性能应用场合对于永磁同步电机控制精度要求越来越高.传统的PI(比例积分)控制方式由于调速范围小、抑制参数摄动效果不明显等缺点难以取得令人满意的调速效果[3].精确的速度信息提取是制约高精度调速控制的另一个重要因素,目前在工业领域应用最广泛的光电编码器通常对位置测量值进行后向差分来估计瞬时速度,由于编码器量化误差和测量噪声的存在,难以获得精确的速度信息,尤其低速情况下,效果更差.为了改善永磁同步电机调速性能,很多先进的方法被用于永磁同步电机调速控制中,例如自适应控制[4]、滑模控制[5]、神经网络控制[6]等.基于自抗扰(ADRC)的电机调速方法[7],自抗扰控制由跟踪微分器(TD)、扩张状态观测器(ESO)和非线性反馈率(NLSEF)三部分组成[8].该算法不依赖系统模型,能够实时估计和补偿扰动.但是由于非线性环节的存在,使其在工程应用时,计算量大、参数整定复杂.而且普通自抗扰通常采用差分法提取速度信号,会将测量噪声放大后引入ESO,影响ESO观测效果,降低系统控制精度.
针对上述问题,结合线性自抗扰控制器与增强微分器,提出了一种新的永磁同步电机调速控制方法,该方法采用线性ADRC,在保留自抗扰控制算法优良控制性能的前提下,更加简单,同时,利用增强微分器来提取精确的速度反馈信号,避免了普通自抗扰控制方法因采用差分法提取速度而造成的噪声放大问题,进一步提高了系统控制精度.
1永磁同步电机数学模型
对于面装式转子结构的永磁同步电机,在两相转子旋转坐标系,即d—q坐标系下,根据永磁同步电机电压方程、磁链方程、转矩方程、运动方程,整理可以得到永磁同步电机理想数学模型为
(1)
(2)
(3)
其中:iq和id分别为d和q轴定子电流;ud和uq分别为定子电压d和q轴分量;ω为转子角速度;Rs为定子电阻;np为电机极对数;TL为负载转矩;J为转动惯量;B为粘滞摩擦系数;Ld和Lq分别为d和q轴的同步电感,对于面装式转子结构永磁同步电机Ld=Lq=L.
在高性能控制场合通常采用id=0的控制方法,该方法可实现d和q轴电流解耦,具有调速范围宽、转矩性能好等优点[9].基于矢量控制的永磁同步电机调速系统原理框图如图1所示.
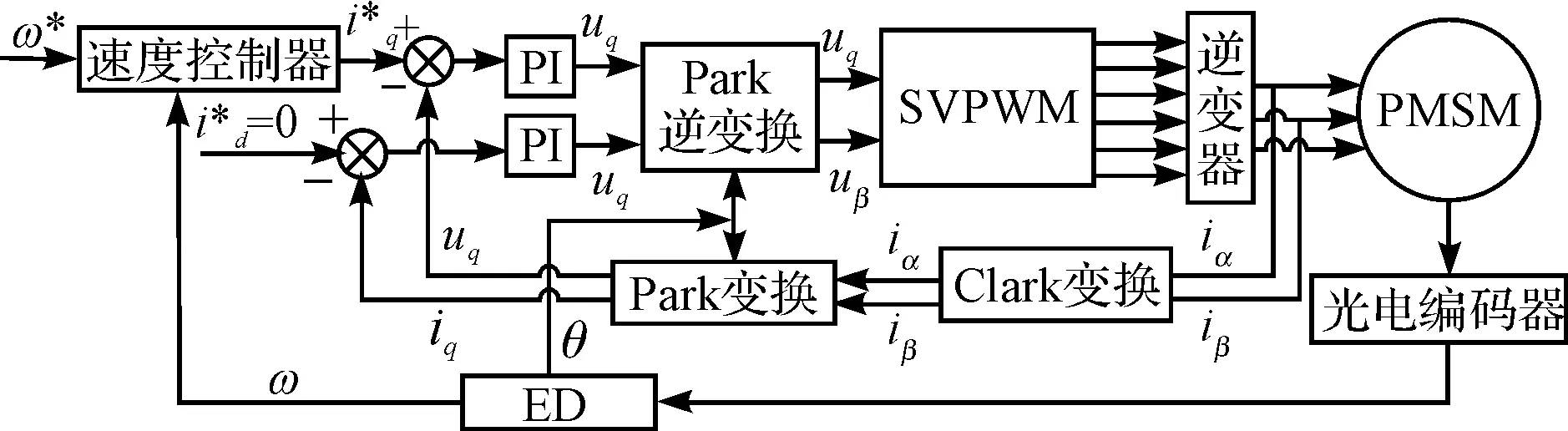
图1 永磁同步电机矢量控制系统原理框图Fig.1 Block diagram of the PMSM control system
这个系统包含一个永磁同步电机、一个SVPWM空间矢量发生器、一个电压逆变器、编码器等.
2速度控制器设计
考虑到系统对于电流环实时性的要求,电流环仍采用PI控制,速度环采用新型自抗扰控制器.考虑电流环的动态响应过程,由电流环PI控制器得
(4)

(5)
由式(1)可将PMSM的速度输出方程写为
(6)
将式(5)中iq带入式(6)得到

(7)


(8)
a(t)包含了负载扰动和其他扰动,根据式(8)可设计二阶自抗扰速度控制器,根据自抗扰的特性它可以实时补偿a(t),消除内外干扰对系统性能的影响,从而实现高精度速度控制.
自抗扰控制器三个组成部分均含有非线性函数,这造成了实际应用时,计算量大,参数调节复杂.采用二阶线性自抗扰来设计速度控制器,并且加入增强微分器来提取精确的速度反馈信号,可以消除转速测量环节的干扰.而且该方法简化计算量和参数调节过程的同时保证了自抗扰算法的优良控制效果,十分符合实际工业控制的需求.新型二阶线性自抗扰控制器结构图如2所示.

图2 新型二阶自抗扰控制器结构图Fig.2 Block diagram of the new second-orderADRC speed controller
图2中的控制器主要由四部分构成:二阶跟踪微分器TD、增强微分器ED、扩张状态观测器ESO和线性PD控制律.这四个部分可被看作四个相对独立的部分,可分别设计再组合成为新型自抗扰控制器,具体设计过程如下:
1) 跟踪微分器TD
(9)
对于给定速度信号ω*可通过TD安排过渡过程,选择适当的参数k1和k2,跟踪微分器不仅能够给出给定速度过渡过程v1,同时给出了过渡过程的近似微分信号v2.
2) 增强微分器ED
(10)

3) 线性扩张状态观测器LESO
采用增强微分器ED提取的速度信号ω,来构建LESO,防止了将测量环节的噪声引入扩张状态观测器.
(11)

4) 线性PD控制律
(12)
3仿真及结果
为了验证所设计速度控制器的有效性,在Matlab 8.1.0的Simulink环境下对永磁同步电机调速系统进行了仿真研究.仿真中所采用永磁同步电机的参数如下所示:定子电阻Rs=1.75 Ω,转动惯量J=0.000 8 kg·m2,d-q轴电感Ld=Lq=0.01 H,额定力矩TN=2.67 N·m,粘滞摩擦系数B=0.04 μN·m·s/rad,极对数Pn=2,额定转速nN=2 500 r/min.
设定目标速度为500 r/min,分别采用新型自抗扰速度调节器和PI速度调节器对永磁电机进行调速控制,选取二阶自抗扰控制器TD参数k1=40 000,k2=1 000,三阶ESO极点ω0=1 200,b=39,调节PI控制器,使其达到最优控制效果.两种控制的转速动态响应曲线如图3所示,由图3中可以明显看出:采用PI速度调节器时系统有较大的超调量、调节时间长,而采用新型自抗扰速度调节器控制,系统超调量较小,而且系统调节速度更快.
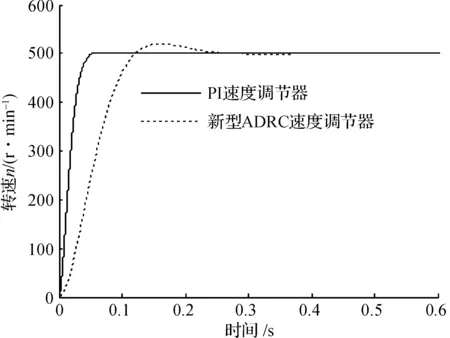
图3 转速阶跃响应曲线对比Fig.3 Speed response comparison
为了进一步验证提出新型ADRC速度调节器对于负载突变的抗干扰性能,在转速稳定状态t=0.5 s,突然加入5 N·m的负载转矩.图4为新型自抗扰速度调节器和PI速度调节器对负载扰动的转速响应曲线,由图4可见:当系统存在负载突变时,新型ADRC具有更小的转速变化和更快的恢复速度,说明新型ADRC对外界扰动有较强的补偿和抑制能力.
高精度的调速控制系统需要精确的速度反馈信息,在考虑速度环节存在测量噪声的情况下对采用差分法提取速度信息的普通自抗扰和加入增强微分器的新型自抗扰速度调节器的调速性能进行比较.在转速测量环节附加一个最大幅值为1的随机噪声干扰,存在测量噪声时,普通自抗扰速度调节器与新型自抗扰速度调节器转速对比如图5所示.
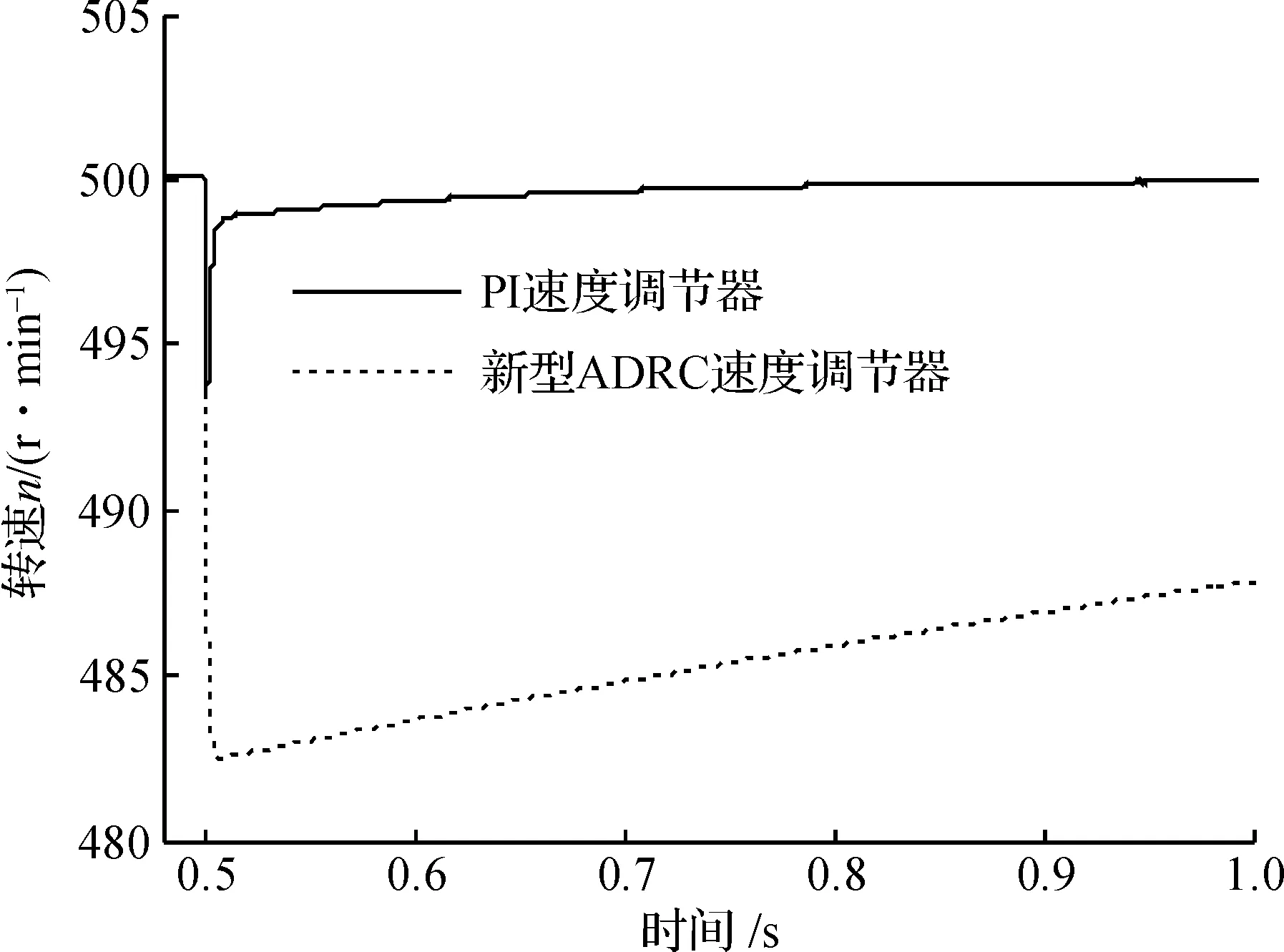
图4 加入负载扰动的转速局部放大曲线Fig.4 Speed response comparison under load disturbance
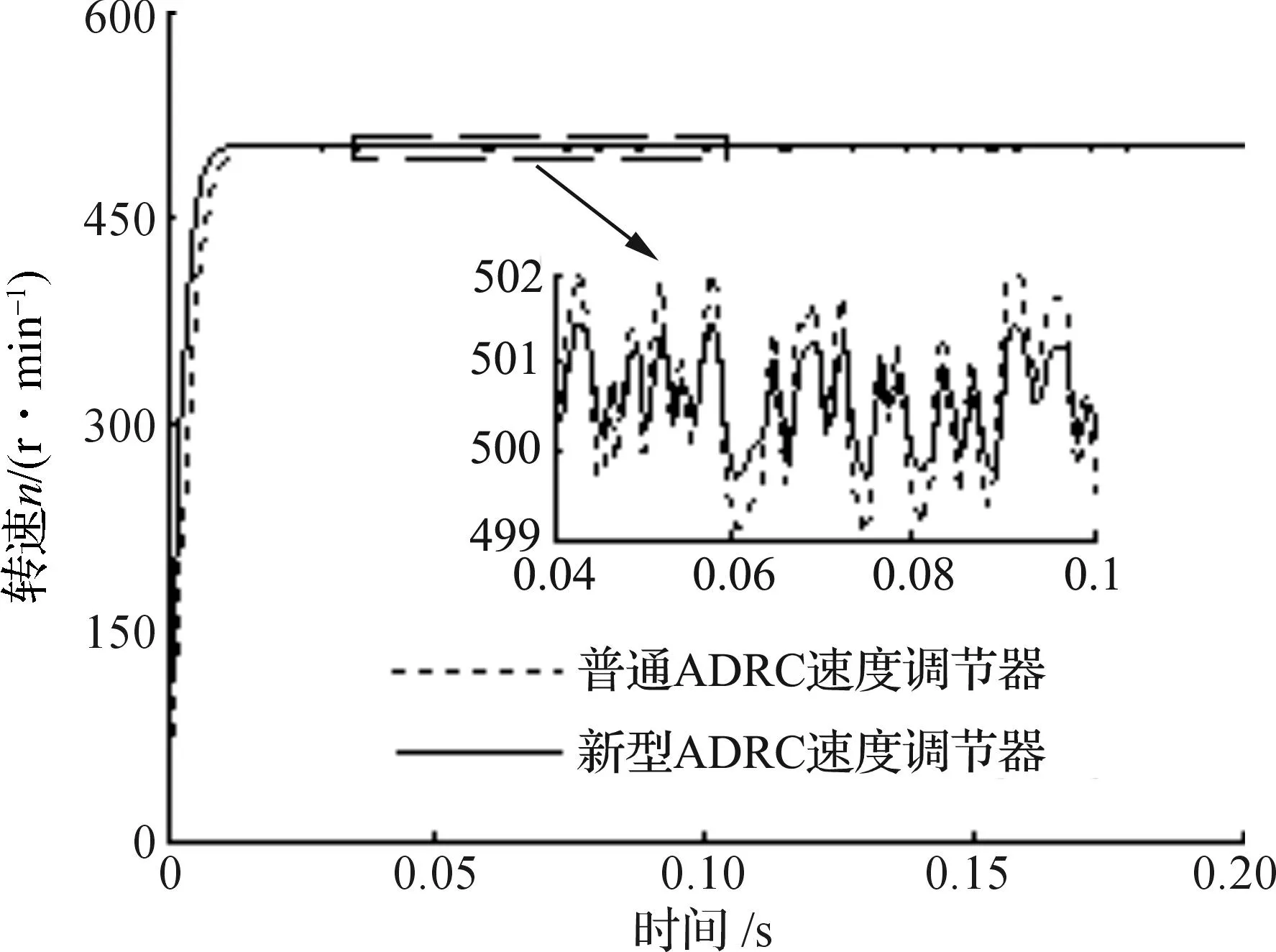
图5 转速测量环节存在噪声情况下的转速响应曲线Fig.5 Speed response comparison under measurement noises
从图5可以看出:在存在转速测量噪声情况下,新型自抗扰的稳态转速波动比普通自抗扰的转速波动要小,这说明增强微分器ED的能够获得一个更加精确的测量速度,避免了转速测量环节的噪声引入ESO,使得ESO能对转速和扰动估计的更加准确从而更大程度地对系统扰动进行补偿,使新型自抗扰具有更好的扰动抑制能力,提高了调速系统的精度.
在低速情况下,转速测量环节的噪声对控制系统的性能影响更加明显,为了验证新型自抗扰速度调节器在低速范围内的表现,给定一个低速的速度输入信号60 r/min,包含一个幅值为1的较大测量噪声,再次对普通自抗扰速度调节器和新型自抗扰转速调节器进行了仿真对比实验.速度响应曲线和稳态转速误差值如图6,7所示,从图6,7中可以看出:新型ADRC转速调节器稳态误差均在1 r/min以内,而普通ADRC转速稳态误差大部分大于1 r/min,所以新型自抗扰速度调节器取得较好的调速效果,说明该速度调节器具有一个比较宽的调速范围.

图6 低速场合存在测量噪声情况下的转速响应曲线Fig.6 Speed response comparison with measurement noises in low-speed ranges
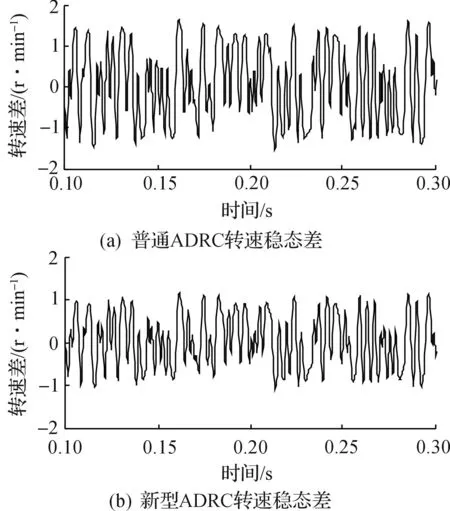
图7 低速场合存在测量噪声情况下的稳态转速差Fig.7 Speed tracking errors with measurement noise in low-speed ranges
以上仿真结果表明:新型自抗扰调速控制具有良好的动态性能,能够有效抑制系统速度测量环节的噪声,鲁棒性较强,而且在低速情形下依然具有良好性能,可实现永磁同步电机的高精度速度控制.
4结论
将线性自抗扰与增强微分器相结合,设计了一种新型自抗扰永磁同步电机速度控制器.通过Matlab对新型自抗扰速度控制器进行了仿真,并与PI控制器和普通ADRC控制器进行了比较分析.仿真结果表明:所设计的新型自抗扰速度控制器具有良好的动态特性和稳态性能,能够有效抑制负载扰动对于转速的影响,尤其在测量环节存在噪声的情况下,增强微分器可以有效抑制测量环节噪声对系统影响,从而提高系统控制精度,而且该新型自抗扰速度控制器在低速场合依然具有良好的表现.
参考文献:
[1]陈诚,李世华,田玉平.永磁同步电机调速系统的自抗扰控制[J].电气传动,2005(9):13-16.
[2]张震,吴根忠.基于变频器容量的永磁同步风力发电机最大功率控制的研究[J].浙江工业大学学报,2010,38(1):49-53.
[3]王江,王静,费向阳.永磁同步电动机的非线性PI速度控制[J].中国电机工程学报,2005(7):125-130.
[4]CHOI H H,LEU V Q,CHOI Y S,et al.Adaptive speed controller design for a permanent magnet synchronous motor[J]. IET Electric Power Applications,2011,5(1):457-464.
[5]汪海波,周波,方斯琛.永磁同步电机调速系统的滑模控制[J].电工技术学报,2009(9):71-77.
[6]曹先庆,朱建光,唐任远.基于模糊神经网络的永磁同步电动机矢量控制系统[J].中国电机工程学报,2006,26(1):137-141.
[7]邵立伟,廖晓钟,张宇河,等.自抗扰控制器在永磁同步电机控制中的应用[J].北京理工大学学报,2006,26(4):326-329.
[8]吴根忠,孙亮.基于自抗扰控制器的风力发电系统最大功率追踪控制[J].浙江工业大学学报,2011,39(5):560-565.
[9]潘扬,徐建明,俞立,等.基于卡尔曼滤波的PMSM驱动器死区补偿[J].浙江工业大学学报,2011,39(3):323-328.
[10]SU Y X,ZHENG C H,MULLER P C,et al.A simple improved velocity estimation for low-speed regions based on position measurements only[J].IEEE Transactions on Control Systems Technology,2006,14(5):937-942.
[11]GAO Z.Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the American Control Conference.Denver:IEEE,2003:4989-4996.
(责任编辑:刘岩)
Research on PMSM speed control based on enhanced differentiator
DONG Hui1, GAO Yang1, ZHANG Wenan1, HAN Ruixiang2
(1.College of Information Engineering, Zhejiang University of Technology, Hangzhou 310023, China;
2.Zhejiang GFIR Machine Tool Co., Ltd., Hangzhou 311400, China)
Abstract:In order to achieve the high-precision speed control of permanent magnetic synchronous motor (PMSM), a new active disturbance rejection control (ADRC) speed control method combining ADRC and enhanced differentiator (ED) is proposed. This new method gains speed signal through ED, and use it to construct linear extended state observer (LESO) which can estimate and compensate load disturbance and other noises. It can avoid amplifying the noise brought by conventional differential method and prevent the measurement noises introduced into LESO which affect the system performance. The simulation results show that the new ADRC controller has faster response speed and smaller overshoot than traditional PID speed controller and ordinary ADRC speed controller. It has high precision performance especially in the presence of measurement noise and low-speed ranges.
Keywords:PMSM; speed control; active disturbance rejection control; enhanced differentiator
文章编号:1006-4303(2015)04-0445-05
中图分类号:TM341
文献标志码:A
作者简介:董辉(1979—),男,浙江永康人,副教授,研究方向为嵌人式系统技术,E-mail:hdong@zjut.edu.cn.
基金项目:工业控制技术国家重点实验室开放课题(ICT1409)
收稿日期:2015-01-12
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年2期)2016-03-22
电脑知识与技术(2016年1期)2016-03-22
哈尔滨理工大学学报(2015年6期)2016-02-18
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11