
横向追拍中的影像动感性实验研究
2016-03-22 01:53汤霞
人间 2016年1期
汤霞
(扬州大学新闻与传媒学院,江苏 扬州 225100)
横向追拍中的影像动感性实验研究
汤霞
(扬州大学新闻与传媒学院,江苏 扬州 225100)
摘要:横向运动的物体产生的影像动感效果与物体和相机的角速度以及摄距相关。通过实地实验设计与操作获取多张动态影像效果,并且依据图像动感效果自定义图像的清晰阶级,以实验输出数据样本的方法,对照影像清晰度进行数值统计与分析;在模糊摄影的语境下,建立主体运动状态与相机工作状态的对应关系;用建立数据模型方式将主体数据与相机数据进行对比性分析研究,通过计算相机角速度与物体角速度之差得出影像效果。实验结果表明:对于同一内容的图像,在同一快门时间内,运动主体与相机的角速度之差越大,影像动感效果越大;摄距越远,影像动感效果越小。
关键词:角速度;摄影;动感效果;清晰度
引言
影像的清晰与模糊历来是摄影创作与评价的重要的话题。何为清晰?其答案事实上也就回答了何为模糊。为此,许多摄影工作者都进行了长时间的探索。
很多情况下,影像的模糊又与被摄体的动感直接相关。于是,为了表现被摄体的动感效果,常常追求影像的模糊。那么,从技术层面上看,在曝光过程中,而相机与被摄体又存在相对移动的时候,如何才能获得恰当的动感效果?
为了更完美地表现动体运动的动感, 摄影家们创造出来了许多表现动感的新方法, 突出地“ 强调了运动的转变过程”的视觉效果。比如追随动体物拍摄法(也称“摇镜头拍摄法”)、多次曝光拍摄法、连续闪光拍摄法、变焦距拍摄法、慢速拍摄法等等。但是这些方法的创立没有一个准确的技术参数来精确的阐释其中存在的数理规律,而这对创作者所要表达的诉求起着关键作用。因为只有把这一点抓牢了,才能谈所谓的“客观真实”升华到“艺术真实”的高度。在一些动感图像中,那些风驰电制、急飞猛进的生动画面,能很快诱发观众对画面上有节奏感的渐变形态产生乐趣,从而把宽度、高度、深度的“三维空间”熔炼成“运动空间”,即产生一种所谓的“时间感”。而“横向追拍中的影像动感性实验研究”在这方面起到了独特作用。
一、横向追拍与动感效果
为了以实验研究的方法来探讨被摄体的动感效果,我们首先应该明确三个基本概念:即横向追拍、影像清晰度和动感。
(一)横向追拍。
横向追拍,是摄影创作中的双动拍摄技术,即主体与相机同时运动的拍摄形式,产生的画面效果属于模糊摄影的艺术表现领域。所谓追随摄影是指用相机追踪被摄的运动主体,并在追踪的过程中按下相机的快门,使运动主体的影像较为清晰,而背景则呈现模糊的线条状,使画面形成强烈的动感效果。快门速度的选择要根据拍摄时的实际情况而定,因为快门速度的选择与拍摄距离的远近、镜头焦距的长短、拍摄角度的大小、相机移动的角速度、主体移动的快慢等方面有着密切的关系。需要指出的是主体移动的越快,快门速度越慢,动感效果越好。并且在拍摄过程中会形成关于拍摄的角度的问题。当图像动感效果不明显的时候,主体和背景都很清晰,而当图像动感效果很明显的时候,主体和背景都很模糊,甚至图像中还会有很明显的线条运动的痕迹。
(二)影像清晰度与动感。
所谓清晰度,又称“象界”,摄影透镜的成像在细微纹理上表现清晰的能力,是说明镜头成像的清晰力和影纹纤细的程度如何。①在这个研究当中,对数据与图像对比进行清晰度描述的时候,这里的清晰度是建立在人眼视觉上的效果去界定的,即通过对主体和背景视觉效果的呈现作客观描述,在分析之前自主对清晰度进行梯度划分。
动感,是指运动物体产生主体清晰,背景呈现有规则的、强烈的线条状模糊的画面效果。②胶片相机在拍摄时,由于曝光时间较长,一些运动物体的成像在焦平面发生位移出现影像模糊,即形成了动感。数码相机在曝光时同样因为曝光时间较长,运动物体的影像在影像传感器上发生位移出现影像模糊,这种影像即是动感影像。③
(三)研究维度。
在此研究中,笔者从技术层面上进行研究。第一,先对横向追拍中的被摄主体进行摄距、角速度和环境因素的实验性数据采集,从而为主体提供数据;第二,对横向追拍中的相机移动角速度、快门速度长短进行实验性数据采集,从而获取相机数据;第三,建立数理模型,将主体数据、相机数据和对应图像效果进行对比性研究,描述数据的变化对影像效果的影响。
在研究过程中,笔者使用单反相机,以实验性产出数据样本的方法,对照影像清晰度进行数值统计与分析,然后在模糊摄影的语境下,建立主体运动状态与相机工作状态的对应关系。
二、实验设计
根据实验所需选取与本实验相关的装置,并且根据实际情况对其相关装置进行改造设计,改造的目的在于降低其误差,同时也降低人工操作的难度。
其中被摄动体的横向移动速度为恒量,以测量计算出的实际数值为基准;
实验变量:摄距、快门速度,在实验过程中,两者都是人为去控制的。
(一)实验研究技术路线。
本研究的技术路线采用实验研究法。首先运用单反相机设备对物体进行实地拍摄,采集相关数据,通过进行大量的实验,对其摄距、快门时间、相机转动角度不断变换,产生不同的动体图像效果。然后对每一种情况的数值对照图像效果进行分析,发现各变量在性质、效果方面发生的变化,以及变量之间可能存在的数量关系,建立分析模型并进行分析,最终得出横向追拍中的影像动感的理化模型,论证横向运动物体其拍摄原理,把握其内在规律,根据所得数据与影像效果进行对比性分析,最后整合研究结论,得出研究结果。
(二)实验装置设计。

图1

图2
图3

图4
图1是根据云台上螺丝的直径大小定制而成,直径约7mm,用于固定云台、全角量角器及相机。图2是360全角量角器,用圆规取中心点再用电钻在中心点打一个直径大约7mm的洞,再把图1螺丝由下而上穿过云台和全角量角器。用全角尺是方便相机在转动的时候观看相机的转动角度。此图为已固定好的云台和全角量角器。图3是粘合于单反镜头上的铜丝,即读数指针。图4是(佳能450D+适马18-50mm镜头的中心点上粘合着铜条指针)。

图5

图6

图7

图8
图5、图6将是将图3铜条对准相机的中心点标记点固定在相机镜头的下方的效果,这样能够在相机转动结束后更准确地读取到相机转动角度值。当相机转动角度60度~90度区间时,手在转动的那一刹那会因为角度增大让行动导致最后读取度数产生误差,为了减小误差,更换了铁丝材质指针固定于相机,将强力磁铁吸附于设定好的度数,待相机转动靠近磁铁时,指针自动吸附于强力磁铁上,即刻听到“啪”的一声,便停止操作,立即读取数据即可。如图7 和8所示。

图9

图10

图11

图12
图9为相机以上整个部分装置的形式。图10卷尺测量相机到运动主体的距离。图11中的相机后方的背景是定制的4m*3m的广告牌,广告牌上只有两行文字和蓝天白云与黄色相间的背景,简洁方便后期影像效果与主体小车的分析对比,即只需要表述背景的动态影像效果和小车的动态影像效果即可。图12是操控主体模型汽车的遥控器。

图13
图14
图13遥控器上的操纵手柄,操控模型汽车的时候,遥控器的操纵柄一直拨动到最前端。图14为整个实验的运动主体。
三、实验过程与数据处理
在本研究中笔者共进行了5组实验。在摄距为1m,2m,3m,4m,5m时,分别对每一摄距值中快门时间分别在1/4s,1/8s,1/15s,1/30s,1/60s时,在每一个快门值上拍摄10张左右相机转动角度不一样的影像并且对每一张影像所对应的数据作记录。最后得出的影像效果比较理想,与整体显示出来的规律相吻合。
(一)数据获取过程。
实验场地默认是在平地,正常选择有光照的白天拍摄,通常8:00am~4:00pm。一天的拍摄数量依据拍摄情况而定。操作时记录的数据有两个,其一快门时间T,其二相机转动角度ɑ。
a、测模型汽车速度。用卷尺测出3m的距离,将模型小车的最前端放置对准起点位置,即车头对准0刻度处,一人看模型小车行驶状态,一人操控模型小车,一人看秒表计算小车行驶时间。一声“开始”口令之下模型手柄和秒表同时按下,待模型车头行驶至3m处时叫“停”,立即按下秒表让其停止计算,再用笔记录下3m使用的时间,循环往复10次获得10组时间数据,分别为t1=1.83s,t2=1.82s,t3=1.83s,t4=1.84s,t5=1.84s,t6=1.83s,t7=1.81s,t8=1.82s,t9=1.82s,t10=1.83s,V车=s/t(平均)=3/【(1.83+1.82+1.83+1.84+1.84+1.83+1.81+1.82+1.82+1.83)/10】≈1.67m/s。
b、测背景与模型汽车距离实验模型汽车离背景距离大约1m,因为在正常拍摄中运动主体和背景都是有预留的一定距离的。将背景置于平地上,从背景到模型侧面量出1m距离,并画线做记号。
c、测量摄距。起始位置于模型侧面的那道线,往后量出1m的距离,并在此位置画线做记号。这1m就是摄距,即相机与运动主体之间的距离,往后2m,3m,4m,5m以此类推进行。
d、将相机装置放置摄距1m处,操控相机者把镜头上的指针对准到全角量角器的0刻度,车行驶起点位于背景的最左边起点,由左向右横向行驶,操控模型者站在模型的后方。将相机快门时间T调为1/4s,相机操控者下口令“开始”,操控模型者将遥控器手柄推至最前端致小车行驶,同时操控相机者将相机向右转动一定角度并且按下快门,两者动作随“开始”口令并行而至,这时,观看画面效果并记录下相机转动的角度和快门时间。依照这样的方法再进行10组相机转动角度不同的数据。接下来相机分别设置为1/8s,1/15s,1/30s,1/60s,分别在不同快门时间内以同样的方法采集相机转动不同角度时的动态影像效果。接下来分别以同样方法在摄距2m,3m,4m,5m时,采集同一摄距里不同快门时间内的相机转动不同角度的值和动态影像效果。
(二)实验数据处理。
计算角速度:
设相机转动角度为ɑ,相机角速度为ß,物体移动线距离为M,物体角速度为Φ,曝光时间为△t,最后用ß-Φ得出画面效果。计算角速度方法如图15、图16所示:
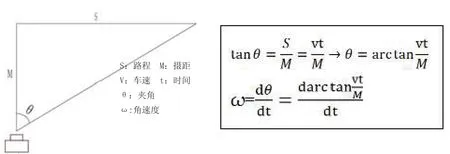
图15
例如:已知V车≈1.67m/s,摄距1m,T(快门时间)=1/4s,ɑ1(相机转动角度)=3°,即M=vt=1.67*1/4≈0.4175m,3°=π/60。
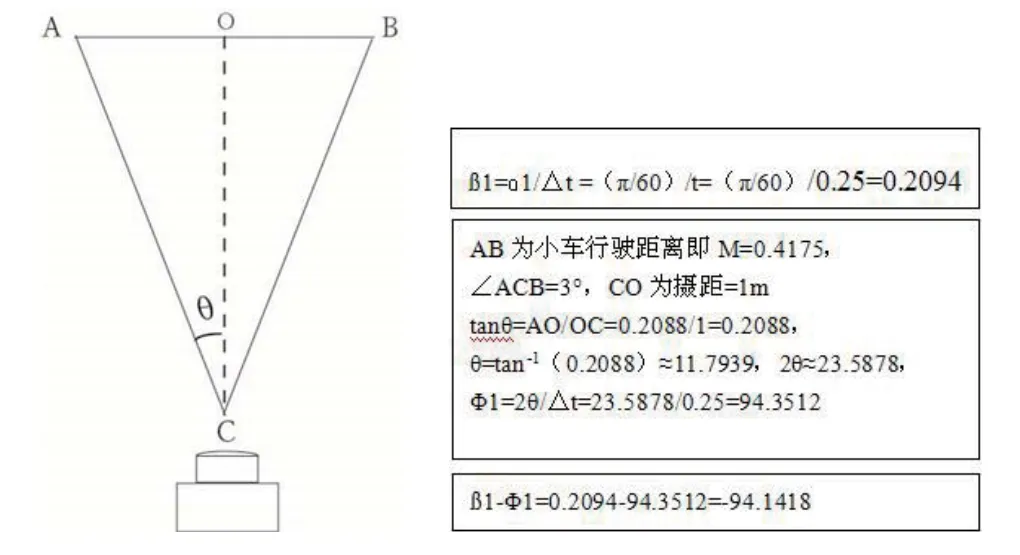
图16
图17 ß1-Φ1即相机角速度与物体角速度之差产生的影像效果
四、实验研究结论
(一)划分清晰梯度。
为了区分动感影像的清晰度,笔者把影像动感效果分为7个阶级,分别用罗马数字表示,Ⅰ、非常清楚,Ⅱ、中等清楚,Ⅲ、一般清楚,Ⅳ、清楚,Ⅴ、轻微模糊,Ⅵ、中等不清楚,Ⅶ、非常不清楚,把动态效果也分为7个阶级表示,a、非常不明显,b、中等不明显,c、有些不明显,d、明显,e、一般明显,f、中等明显,g、非常明显,Ⅰ对应a,Ⅱ对应b,Ⅲ对应c,Ⅳ对应d,Ⅴ对应e,Ⅵ对应f,Ⅶ对应g。如图18所示:

图18
(二)数据建模。
由于数据繁多,共占文档58页,在进行数据和影像效果对比分析后,笔者发现在摄距为1m,2m,3m,4m,5m时每一组数据的角速度差与画面对应效果的规律是一致的,因此笔者选取最具代表性的两组数据进行对比阐述,分别为摄距2m快门时间1/15s和摄距5m快门时间1/15s时的数据,通过笔者自定义的清晰阶级和实际影像动态效果描述给影像动态效果的大小做一个定论。
如图19(摄距2m 快门时间1/15s):
1、当角速度差为-46.5063时,画面清晰阶级为Ⅰ(非常清楚),动感效果为a(非常不明显),背景很清晰,所有字包括细节都能看得很清楚,小车稍有模糊,但还是能够看到它整个形状;
2、当角速度差为-39.9613时,画面清晰阶级为Ⅱ(中等清楚),动感效果为b(中等不明显),背景字体已经出现模糊的效果,并且小车的动态效果产生了微微的线条;
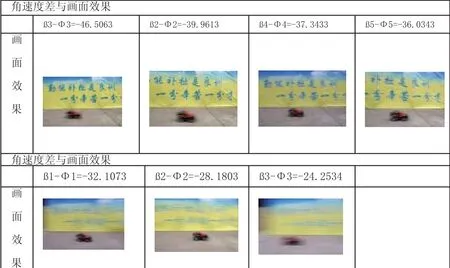
图19
3、当角速度差为-37.3433时,画面清晰阶级为Ⅲ(一般清楚),动感效果为c(有些不明显),背景字体相比前一组更加模糊不清,明显有动态的痕迹,比如“能”这个字已经不能很清楚在第一时间内看清楚是什么字,小车也是模糊的;
4、当角速度差为-36.0343时,画面清晰阶级为Ⅳ(清楚),动感效果为d(明显),背景字体不仅比之前模糊而且还出现了重影状态,小车不仅产生线条,而且也出现了重影;
5、当角速度差为-32.1073时,画面清晰阶级为Ⅴ(有些不清楚),动感效果为e(一般明显),背景字体除了隐隐约约看到“一”字之外其它字体已经看不清是什么字,小车虽然车的形状还能辨别,但整体处于模糊状态;
6、当角速度差为-28.1803时,画面清晰阶级为Ⅵ(中等不清楚),动感效果为(中等明显),背景上不仅看不清任何一个字而且出现线条和重影,但隐隐约约还能辨别出上面是文字,小车形状还能看清但比上一组还要模糊;
7、当角速度差为-24.2534时,画面清晰阶级为Ⅶ(非常不清楚),动感效果为g(非常明显),背景已经完全模糊,线条感很强,小车也呈模糊状态,也产生出了动感线条,整个画面动感效果非常强烈。综上所述,得出图20:

图20
由分析可知:第七幅动感效果最强烈。第一幅到第七幅影像的动感效果递增,即动感效果越来越大。
如图21(摄距5m 快门时间1/15s):
1、当角速度差为-17.8213时,画面清晰阶级为Ⅰ(非常清楚),动感效果为a(非常不明显),背景完全清楚,小车稍微模糊,但能够看清具体形状;
2、当角速度差为-13.8943和-12.5853时,画面清晰阶级为Ⅱ(中等清楚),动感效果为b(中等不明显),背景较前一组有一些模糊,小车的状态和前一组对比变化较小;
3、当角速度差为-10.4909和-9.9673时,画面清晰阶级为Ⅲ(一般清楚),动感效果为c(有些不明显),背景模糊,小车也出现一些模糊的线条;
4、当角速度差为-6.5639时,画面清晰阶级为Ⅳ(清楚),动感效果为d(明显),背景模糊,字体出现重影,车的模糊变化较前一组没有明显动态;
5、当角速度差为-6.0403时,画面清晰阶级为Ⅴ(有些不清楚),动感效果为e(一般明显),背景模糊,字体已经有拉伸现象,出现线条和重影,不能很清楚得看出上面是一句什么话,小车依然是模糊状态;
6、当角速度差为-3.4223时,画面清晰阶级为Ⅵ(中等不清楚),动感效果为(中等明显),背景完全模糊,并且完全看不到上面的字体,只能辨别上面是字体,但是字体和小车呈明显的线条状态;
7、当角速度差为-0.8043和3.6462时,画面清晰阶级为Ⅶ(非常不清楚),动感效果为g(非常明显),影像中只有线条,而看不见任何字和物体,画面完全模糊。综上所述,得出图22:
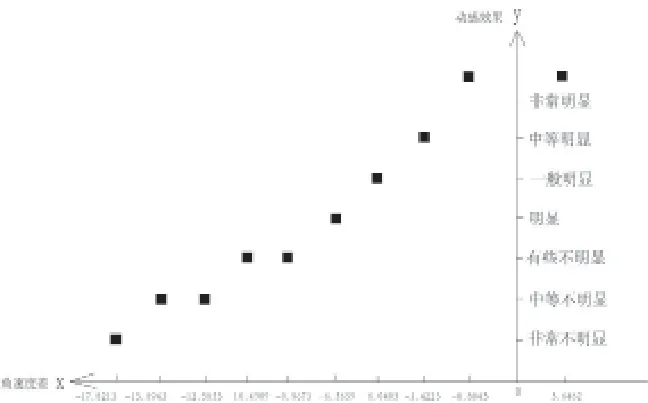
图22
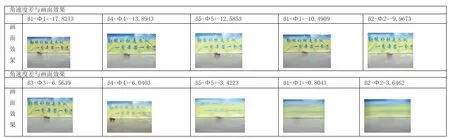
图21
由分析可知:第十幅动感效果最强烈。第一幅到第十幅影像的动感效果递增,即动感效果越来越大。
另外,整体对比摄距2m快门时间1/15s和摄距5m快门时间1/15s的画面,可以清楚地看出相同区间里,摄距越小,动感效果越明显。如摄距2m时角速度差为-24.2534的画面与摄距为5m时角速度差为-17.8213的画面,他们之间的差值很小,但画面的清晰与模糊程度相差很大,综上所述,相同快门时间内,摄距越小,动感效果越明显。
(三)结论。
本研究在模糊的语境上对横向运动的物体与相机的角速度差形成的影像动感效果进行了探索,通过实际实验获取了相机与被摄体存在相对移动的时候怎样才能获得恰当的动感效果的方法。实验中通过相似性准则、模糊性准则和距离误差的约束减少整体误差的存在,更加验证了实验结果的客观性。
根据实验得出结论: 对于同一内容的图像,在同一快门时间内,运动主体与相机的角速度之差越大,影像动感效果越大;摄距越远,影像动感效果越小。在具体实施过程中,会由于个人自身的一些原因,难免会导致一些误差的存在,但无论误差是多少,其中存在的规律是一定的。
注释:
①古原鸣.摄影实践指南[M].香港:香港崇明出版社,1976,第53页。
②朱清宇.追随摄影的魅力与技巧[J].照相机,2011.
③胡宗祥.动感摄影的秘密[J].照相机,2014.
参考文献:
[1]张维中,张丽艳,潘振宽,王小平,周玲.一种基于标记点的近景摄影测量系统[J].东南大学学报( 自然科学版),2006.
[2]胥蔚蔚.浅谈模糊摄影的表现形式[J].科技信息,2008.
基金项目:江苏省普通高校学术学位研究生科研创新计划项目《横向追拍中的影像动感性实验研究》
作者简介:汤霞(1989-),女,江苏省宝应县人,研究生,学生,研究方向:摄影艺术。
中图分类号:J705
文献标识码:A
文章编号:1671-864X(2016)01-0247-04
猜你喜欢
医院管理论坛(2022年8期)2022-10-14
科学与生活(2021年16期)2021-11-25
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
求学·素材版(2016年12期)2017-01-03
小学教学参考(综合)(2015年2期)2015-05-04
旅游纵览(2014年8期)2014-09-10
焦点(2014年3期)2014-03-11
