
改进后圆心定位算法
2016-04-11 01:12王小攀郝向阳刘松林朱永丰
测绘工程 2016年4期
王小攀,郝向阳,刘松林,朱永丰
(信息工程大学 导航与空天目标工程学院,河南 郑州 450001)
改进后圆心定位算法
王小攀,郝向阳,刘松林,朱永丰
(信息工程大学 导航与空天目标工程学院,河南 郑州 450001)
摘要:圆心定位是摄影测量学中常用的关键技术,圆形人工标志的检测和定位算法有中值法、质心法等。由于中值法和质心法容易受到噪声影响,会对定位圆心带来干扰,在一些领域应用中受到限制。基于此,提出一种改进的自适应阈值质心法圆心定位算法,统计圆形标志的像素数,排除由噪声影响造成的非圆形目标的干扰,同时记下边缘点位置。利用计算出的圆心位置和统计的边缘位置得到圆形目标的大小。实验表明,该算法能够成功定位圆心和半径并排除噪声的干扰。
关键词:圆心定位;阈值;人工标志;精度;噪声;自适应
在光学测量中,应用着大量的人工标志,其中应用最为广泛的就是圆形人工标志。圆形标志的定位是测量的首要任务。传统的圆心定位方法有基于圆拟合的激光光斑检测算法[1]、重心法[2]、中值法[2]、hough[3]变换等。第一种算法通过最小二乘圆拟合激光光斑轮廓,可以求出光斑半径;中间两种算法对于所拍摄的图像要求比较高,要求图像灰度分布比较均匀,否则将会产生较大的误差。最后一种算法需要逐点进行记录、投票、变换等过程,算法比较复杂,定位精度也比较低,不适合实时的定位应用。传统质心法前期通过图像预处理即滤波、阈值分割等手段分离出目标与背景,在二值图像上进行圆心坐标提取,它易受到噪声连续区域影响,产生错误定位,干扰后期的计算,而且还无法求出圆形人工标志半径。本文提出的自适应阈值质心法圆心定位算法是在传统质心法的基础上,利用先验知识得到圆形标志的像素个数,并将此设为阈值,在圆心定位的过程中统计每一个目标的像素个数并与之比较,同时记下边缘点位置,成功过滤掉噪声区域并求出目标大小。
1传统质心法
如图1所示,设图像大小为M×N对于图像中的圆形标志,通过图像的预处理阶段,将目标与背景分离开来,白色区域代表圆形标志,黑色为背景。设定关于图像中的每一个像素的判定函数G(i,j),如果此像素位于目标圆形标志内时,它的值为1;如果位于背景中,它的值为0。即


图1 圆形标志图
此圆形标志的坐标为
(2)
以时间复杂度来考虑算法的速度,假设圆形目标直径为n,式(2)是在圆形目标区域内求和,因此时间复杂度为O(n2)。但是,由于质心法是对所有目标区域内像点坐标和求平均值,对于二值化后依然含有噪声的图像,噪声区域与圆心目标区域没有分离开来,容易把噪声比较多且连续区域也识别成圆形目标,如图2所示。

图2 分割后图像
这样把噪声区域当成圆形目标来计算出噪声区域中的错误坐标,对于后期的计算产生干扰。
2一种改进的圆心定位算法
针对传统质心法的缺点,提出一种改进的自适应阈值质心法。在传统质心法的基础上,前期图像处理使用均值滤波过滤掉一些离散的噪声点,再使用自适应阈值法对图像进行分割,分离出目标和背景,遍历图像找出圆形目标的第一个点即是边缘点,记录第一个点,统计圆形目标的像素个数T,以此为阈值,判断搜索其他的圆形目标的像素个数T′,如果与T相差不大,则判定为圆形目标,下一步进行圆心坐标提取。如果与T相差比较大,则判定为噪声区域,不对它进行圆心坐标提取。利用提取出的圆心坐标与边缘点进行圆形目标半径计算,得到圆形目标的大小。
具体定位步骤:
1)首先对采集的图像进行滤波平滑处理。过滤掉离散的噪声点,常用的滤波模板有高斯滤波、均值滤波、中值滤波等。高斯模板是根据高斯函数和高斯半径尺寸来构造的。高斯函数:
(3)
(i,j)代表图像的像素位置,δ是尺度空间因子,值越小表示图像平滑的越少,相应的尺度也就越小。均值滤波模板如下:
(4)
可以适当增加中心像素点的权重。中值滤波是通过统计其八邻域像素的大小进行排序,取中间值的像素大小为目标点的像素。
2)阈值分割,分离出目标与背景。阈值分割可以人为设定固定阈值,也可以采用自适应阈值的方法,本文采用的是自适应阈值分割。首先,选取一个初始迭代阈值,初始迭代阈值是根据灰度图像像素的最大和最小灰度值的平均值来确定。设灰度图像中最大像素值为Smax,最小像素值为Smin,则初始迭代阈值为
(5)
然后,以初始迭代阈值为界,将灰度图像中的像素值大小分为两个部分,分别统计两个部分像素的个数,设为n1和n2,并分别计算两个部分的像素值之和,为SUM1和SUM2,计算新的平均值
SUM=(SUM1/n1+SUM2/n2)/2.(6)
3)圆心定位。对于处理后二值图像,遍历搜索每一个像素点,判断灰度值,此时图像灰度值只有0和255,可以选取一个近似中间值120来标记找到的像素点。如果像素灰度值大于120,则认为找到了圆形目标的第一个边缘点,记录下这个点的坐标信息,并将此边缘点的灰度值赋为120,并以此像素点为中心,给定半径R(半径R的大小确保能够把一个圆形目标包含在内),在此半径大小的矩形区域搜索,搜索区域内灰度值大于120的像素点,并统计其个数,与利用先验知识得到的像素个数进行比较,若符合条件,根据式(2)计算出圆心坐标。参考搜索到的第一个边缘点可以计算得到圆形目标的半径。
3实验结果与分析
打印的一张圆形人工标志照片。该人工标志是用于相机标定场的8点位编码图像。由于拍摄环境受到自然环境光的影响,所拍摄的图片如图3所示会有一些噪声。实验结果如图3所示。

图3 原图像
实验分析:图4是使用自适应阈值处理后的结果,很明显还有一些噪声区域没有被过滤掉。使用传统重心法进行圆形定位的结果如图5所示,很明显,噪声区域也被当成圆形目标被识别出来。图6是本文改进的算法处理的结果。图7是为进一步验证本算法的稳定性拍摄的另一组普通圆形标志图像;图8是图像处理后的图像;图9是传统重心法的定位结果;图10是本文算法的定位结果。通过对比,本文算法过滤掉噪声连续区域,而且计算出圆形目标半径的大小。

图4 分割后的图像


图5 传统质心法
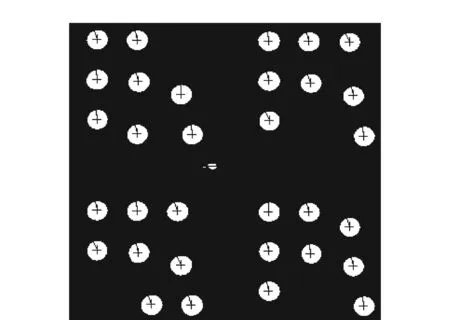
图6 本文算法

图7 噪声图像

图8 处理后的图像

图9 传统质心法

图10 本文算法

点号V-STARS检测结果传统质心法本文算法检测结果传统算法误差本文算法误差1(133.380,194.108)(133.467,194.065)(133.468,194.066)0.0950.0972(396.954,194.108)(397.006,194.083)(397.008,194.083)0.1870.1863(660.529,194.107)(660.523,194.080)(660.525,194.080)0.0270.0274(924.104,194.106)(924.147,194.165)(924.147,194.167)0.0710.0755(1187.679,194.108)(1187.731,194.102)(1187.730,194.102)0.0500.0516(1451.253,194.108)(1451.293,194.102)(1451.290,194.102)0.0360.037
4结束语
针对传统质心法无法过滤掉噪声连续区域,易产生错误的定位,而且还无法计算出圆形标志的半径大小,本文算法在传统重心法的基础上,采用统计圆形目标像素个数为目标阈值的方法成功的解决了这一问题,并能够计算出半径的大小。但根据文献[2]可知由于图像畸变,圆形投影会发生变形,该算法受到圆形目标的形状影响较大,而且由于搜索过程设定阈值,过滤噪声区域,过大或者过小的圆形目标也被当成噪声区域过滤掉。因此,对于一些领域不能很好的应用,还需要进一步提高。
参考文献:
[1]孔兵.基于圆拟合的激光光斑检测算法[J].红外与激光工程,2002(3):275-279.
[2]唐冠群.几种激光光斑中心定位算法的比较[J].北京机械工业学院学报,2009(1):61-64.
[3]焦圣喜,肖德军,阚一凡.霍夫变换算法在圆心视觉定位中的应用研究[J].科学技术与工程,2013(14):4089-4093.
[4]夏丽.基于迭代最佳阈值分割的边缘检测研究[J].时代教育,2012(11):29-39.
[5]SAHOO P K,WILKINS C,YEAGE J.Threshold Selection Using Renyi’s Entropy[J].Pattern Recognition,1997,30(1):71-84.
[6]SAHOO P K.A Thresholding Method Based on Two-dimensional Renyi’s Entropy[J].Pattern Recognition,2004,37(6):1149-1161.
[7]CHEN D,LIU J,YU L.Comparison of Image Segmentation on the Thresholding Method[J].Machine Building and Automation,2003(1):77-80.
[8]陈新禹,马孜,胡英,等.视觉测量中圆形标记点的高精度定位[J].光电子·激光,2013(8):1524-1528.
[9]曹建海,路长厚.基于灰度图像和矢量的圆心定位[J].光电子·激光,2004(6):714-718.
[10] KAPUR J N,SAHOO P K,WONGA K C.A New Method for Gray-level Picture Thresholding Using the Entropy of the Histogram[J].Computer Vision,Graphics and Image Processing,1985,29(3):273-285.
[11] 吴慧兰,刘国栋,刘炳国,等.基于SIFT算法的圆心快速精确定位技术研究[J].光电子·激光,2008(11):1512-1516.
[12] 张虎.光学测量中椭圆圆心定位算法研究[J].应用光学,2008(6):905-911.
[13] 邢德奎,达飞鹏,张虎.圆形目标精密定位方法的研究与应用[J].仪器仪表学报,2009(12):2593-2598.
[14] 李旭.空间圆拟合方法在地铁洞门坐标计算中的应用[J].测绘与空间地理信息,2015,38 (3):177-178.
[责任编辑:李铭娜]
An improved algorithm of center location
WANG Xiaopan,HAO Xiangyang,LIU Songlin,ZHU Yongfeng
(School of Navigation and Space Target Engineering,Information Engineering University,Zhengzhou 450001,China)
Abstract:Center location is a key technology used commonly in photogrammetry.The algorithm of detection and localization about circular artificial mark are Median method and Centroid method.The Median method and Centroid method are easily affected by noise.It can disturb the localization of center.So it is limited in some fields.In light of this,the paper presents an improved adaptive threshold circle Centroid location algorithm through priori knowledge of the number of pixels of circle mark and the position of the edge point.Using the calculated center position and statistical position of the edge it can get the size of the circular target.The experiment shows the algorithm can locate center of circle and remove the effect of noise.
Key words:center location;threshold;artificial mark;accuracy;noise;self-adaption
中图分类号:P231
文献标识码:A
文章编号:1006-7949(2016)04-0015-04
作者简介:王小攀(1990-),男,硕士研究生.
收稿日期:2014-12-10;修回日期:2015-06-10
猜你喜欢
数学年刊A辑(中文版)(2020年3期)2020-10-27
制造技术与机床(2019年9期)2019-09-10
西南交通大学学报(2018年6期)2018-12-18
中学生数理化·八年级物理人教版(2017年9期)2017-12-20
河北遥感(2017年2期)2017-08-07
科技视界(2016年26期)2016-12-17
科教导刊·电子版(2016年26期)2016-11-21
汽车科技(2016年5期)2016-11-14
中国新通信(2016年16期)2016-10-18
衡阳师范学院学报(2016年3期)2016-07-10
