涠洲11-2 WHPB导管架拖拉装船设计及工程应用
2016-04-13 03:02魏佳广严亚林
石油工程建设 2016年6期
魏佳广,严亚林
海洋石油工程股份有限公司,天津 300461
涠洲11-2 WHPB导管架拖拉装船设计及工程应用
魏佳广,严亚林
海洋石油工程股份有限公司,天津 300461
对于万吨级以下的结构物,拖拉装船已成为海洋工程领域最常用的一种装船方法,采用拖拉装船技术取代传统造价昂贵的大型浮吊吊装装船技术,可大幅降低施工成本。以涠洲11-2 WHPB导管架拖拉装船为例,在简要介绍了工程概况的基础上,较详细地介绍了3腿偏心导管架拖拉装船过程中,系泊的稳性要求、拖拉设备的选型、滑道布置、驳船吃水、驳船的调载步骤等,最后阐述了11-2 WHPB导管架的现场拖拉装船过程。工程实践表明,所设计的11-2 WHPB导管架拖拉装船方案成熟、可靠,很好地满足导管架的拖拉装船工程要求。
导管架;拖拉装船;偏心;调载
随着社会对油气及矿产资源的需求日益增加,面对大海深处蕴藏的丰富的油气、矿产资源,人类开始了对海洋资源的开发和探索,海洋资源尤其是我国海洋油气资源的开发逐渐由渤海、黄海等浅海区域向北部湾、东海、南海等较深水区域延伸,深水已成为油气产量的主要接替区和中国海洋石油开发的发展方向。建造的海洋石油采油平台和应用最广泛的导管架的尺寸规模也越来越大,吨位越来越大。
渤海、辽东湾等浅水区导管架一般采用立式建造,其装船方式根据大型船舶资源及建造场地装备设施情况,可以采用吊装装船,也可采用拖拉装船[1-2];南海、东海等深水区导管架一般采用卧式建造,由于导管架体积、质量、高度等因素的影响,其装船方式都采用拖拉方式装船。目前,国内从几百吨到万吨级导管架的滑移装船研究及应用已经趋于成熟。但由于某些导管架的设计结构并非对称结构,拖拉装船过程受到导管架自身性能和结构的影响,在设计中不但要考虑保持拖拉过程的稳性需求,还要考虑滑靴的偏移情况,使得滑移装船风险变大。在多数情况下,导管架的重心偏移会导致拖拉过程中导管架拖拉方向跑偏,另外也增加了自身稳性不足的风险。因此,开展此类导管架拖拉装船设计分析很有必要。
本文较详细阐述了重心偏移式(非对称式)三腿导管架的拖拉装船方法,并依托涠洲11-2 WHPB导管架陆地装船项目,结合装船实际过程对其进行分析验证,为今后在同类工程中的实施提供参考。
1 工程概况
涠洲11-2油田位于中国南海北部湾海域,所在海区水深约35 m。11-2 WHPB导管架为3腿立式导管架,3裙桩,其结构总高度为47 m,质量约为662.14 t,底部尺寸21.0 m×20.5 m,顶部尺寸13 m×13 m,驳船滑道尺寸1.8 m×1.5 m×10 m。导管架特征是重心偏心,1轴放置2排滑靴C1、A1,2轴放置1排滑靴B2,且导管架重心高,底部尺寸小,稳性较差,以拖拉方式拖拉至某运输驳船设计位置,见图1。

图1 导管架码头建造及滑靴布置示意
2 拖拉装船
一般来讲,设计的拖拉装船流程为:导管架在某码头滑道上建造,运输驳船的滑道与所选建造场地码头上特定的滑道在驳船压载后保持对齐,且驳船船底离港池泥底有一定的安全间隙,而后利用牵引绞车系统,沿着滑靴和滑道接触的轨迹,将导管架平稳缓慢地由码头拖拉至运输驳船[3]。为保证导管架平稳拖拉上船,拖拉过程需要适时调载船舶,以保持码头滑道面与驳船滑道面处于同一水平面上,并对齐,不因潮汐的变化而变化。因此拖拉装船难度大,风险高,尤其是运输驳船的适时调载,是影响拖拉装船成败的重要环节。
2.1 系泊的稳性要求
在导管架拖拉装船的过程中,运输驳船由于受到驳船荷载分布不均、结构物拖拉上船质量的突变、潮汐变化、恶劣环境工况、拖拉绞车系统失效、压排载系统故障等因素的影响,会导致驳船失稳,因而保持运输驳船的稳定性是拖拉装船过程中的重中之重。
稳性设计即系泊设计,应考虑最不利工况、潮汐变化对运输驳船和导管架所产生的作用力。一般来说,在运输驳船两侧分别对称布置两台绞车,并系泊于码头的地锚处,通过连接系泊缆与驳船的设计位置,以提供垂直码头方向的拖拉反力和平行码头方向的风、浪、流作用反力。系泊缆的选型可根据风、浪、流作用的合成来求解,具体作用力的大小可由以下计算公式[4]得出。
流作用力Fc(kN):

浪作用力Fw(kN):

风作用力Pw(kN):

总的作用力F(kN):

式中:Rw为海水的密度,t/m3;Ac为受流影响的截面积,m2;Cd为流的阻力系数,无量纲;Vc为流的速度,m/s;B为运输驳船的宽度,m;L为运输驳船的长度,m;Hs为有效波高,m;Ra为大气的密度,kg/m3;Cs为形状系数,无量纲;Ch为高度系数,无量纲;Aw为受风影响的截面积,m2;Vw为风速,m/s。
由此可得出每根系泊缆在预设角度的作用力,进而根据系泊缆的安全工作载荷、破断载荷选择相应规格的缆绳。
以涠洲11-2 WHPB导管架拖拉装船为例,系泊缆与驳船的夹角分别为:T1为43°,T2为27°,T3为37°,T4为26°,据此计算得到,其4根系泊缆的作用力分别为T1=125.3 kN,T2=110.7 kN,T3=83.3 kN,T4=196.6 kN。因此选择规格为φ43 mm的钢丝绳系泊驳船,其破断载荷为1 200 kN,安全系数均大于3.0,满足稳性要求。具体选取的系泊缆规格为φ43 mm×60 m×2根、φ43 mm×130 m×2根,均采用项目利库材料。图2所示为运输驳船系泊设计。
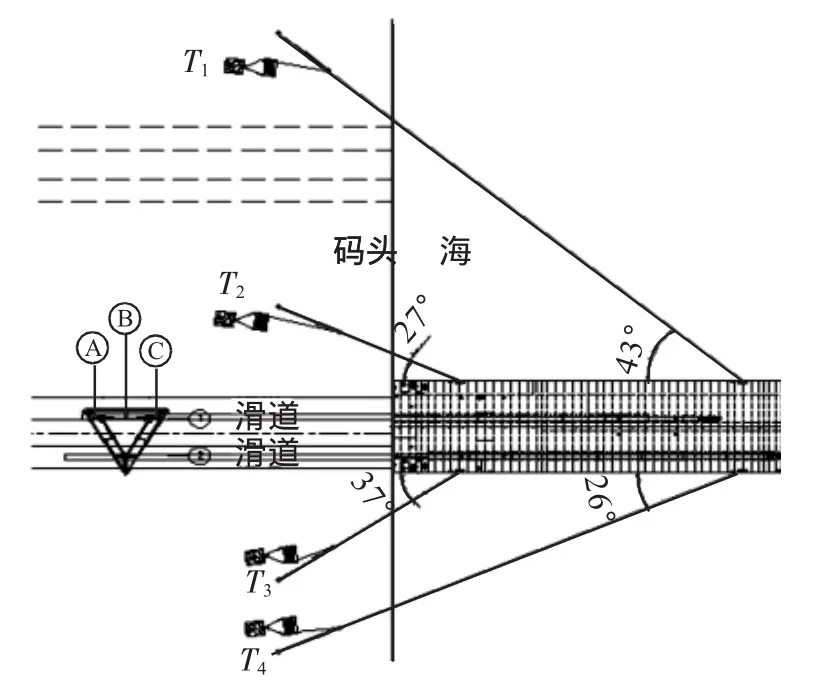
图2 运输驳船系泊设计
2.2 拖拉设备选型
在拖拉装船过程中,牵引绞车系统是一个重要的组成部分,用来提供足够的牵引力以克服滑靴和滑道间的摩擦力。浅水导管架吨位较轻,可采用45、75 t等系列绞车拖拉装船,但具体对绞车系统进行选型,则需根据规范指导文件计算得出。一般来说,滑靴垫木与滑道钢板面间的静摩擦系数取0.2,另外还要考虑结构物偏心导致两侧拉力的不同、滑轮组折减系数的取值[5],折减系数与穿绳股数关系见表1。

表1 滑轮组穿绳股数与折减系数
在涠洲11-2 WHPB导管架拖拉装船设计中,可根据摩擦力公式计算结果对绞车规格进行选型:

式中:Fn为正压力,即WHPB导管架的重力,则单侧牵引力F单=F/2=662.14(kN)。当穿绳股数为8股时,则单根绳子拉力f=摩擦力/折减系数 = 662.14/6.6=100.32(kN)。因此选择45 t规格的绞车即可满足拖拉装船要求。
2.3 滑道布置
对称式4腿、6腿及8腿导管架的滑道布置设计思路是:滑靴中心间距等于驳船上滑道中心间距,且滑道内限位、外限位与滑靴的间距相等。但涠洲3腿裙桩导管架11-2 WHPB本身的结构特征是重心偏离几何中心,拖拉装船过程中两侧滑靴会由于受力不均而出现滑靴偏离滑道轨迹的情况,因此滑道的布局设计极为重要。
涠洲11-2 WHPB导管架滑靴中心距13 m,滑道面限位宽度1.3 m,滑靴底部垫木宽0.75 m。为保证拖拉过程中导管架重心偏移对驳船结构强度及稳性的影响最小,设计需考虑导管架滑靴结构完全处于滑道上,因此滑道中心距也应为13 m。但根据导管架重心偏移的结构特点,需要对导管架滑靴的行走轨迹加以限制,因此运输驳船两侧滑道的限位需要重新调整,以保证导管架拖拉装船过程中滑靴能够按照滑道预设的轨迹行走。
设计思路为:分别保持滑道中心距与滑靴中心距13 m不变,调整导管架两侧滑道的内限位,使其与滑靴垫木间距均为75 mm,而外限位与滑靴垫木间距275 mm保持不变。这样可保证导管架拖拉装船过程沿滑道限位内轨迹行走,即使滑靴垫木与滑道内限位贴合,也可保证另一侧滑靴不会碰撞滑道外限位,从而有效地避免了在导管架拖拉过程中由于导管架偏心而偏离轨迹的情况。另外,可通过调整两侧拖拉绞车的拉力大小来控制导管架两侧滑靴行走的速度,以适时微调导管架的拖拉方向,见图3、4。

图3 导管架装船布置

图4 滑靴限位设计
3 调载分析
驳船调载是导管架拖拉装船过程的重要环节,在拖拉过程中,时刻保持驳船滑道面与码头滑道面的平齐(在同一水平面对准)是实现导管架成功拖拉上船的前提。
立式导管架陆地建造及装船一般采用非连续滑靴(间断),由于受潮汐周期变化、导管架重心偏移、驳船摇摆、牵引绞车拉力不均等因素的影响,在导管架拖拉装船过程中容易出现导管架偏离滑道及驳船发生横、纵倾现象,此时导管架将产生较大的应力,严重时会造成结构物局部破坏,因此调载分析对导管架的拖拉装船至关重要。
3.1 驳船吃水
需考虑潮汐的周期性变化、导管架在驳船上的荷载分布、码头标高、港池水深、驳船型深及吃水等参数,校核装船期间驳船的吃水范围及潮水是否满足要求;测量导管架装船前3 d的实际潮高,并与潮汐表比较,以确定初始潮高修正值,保证拖拉调载能与实际潮水变化匹配。
图5为导管架拖拉装船示意,由图5可得到以下计算式:码头标高+陆地滑道高-潮高X=驳船滑道高度+驳船型深-驳船吃水Y。化简后得到:驳船吃水Y=驳船滑道高度+驳船型深+潮高X-码头标高-陆地滑道高。结合驳船及码头的基础参数,见表2,则得到Y=3.624+X。
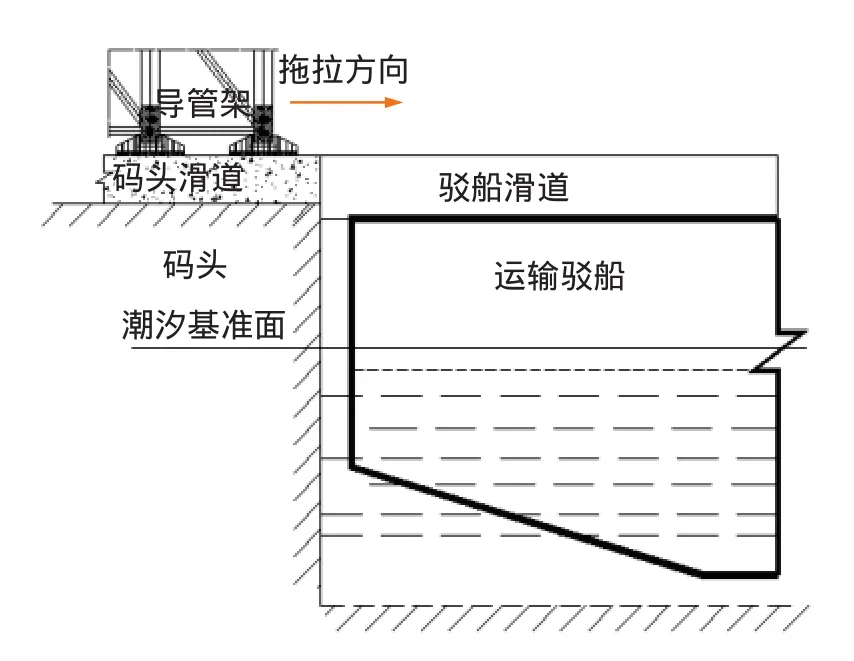
图5 导管架拖拉装船示意

表2 驳船及码头基础参数
由潮汐表可查得在拖拉时间内低潮位和高潮位的数据分别为(+)0.59 m和(+)2.59 m,这与实际的测潮结果基本吻合,见图6。因此驳船在拖拉期间最小吃水是4.214 m,最大吃水是6.214 m。由于驳船型深8 m,因此最大吃水满足要求。
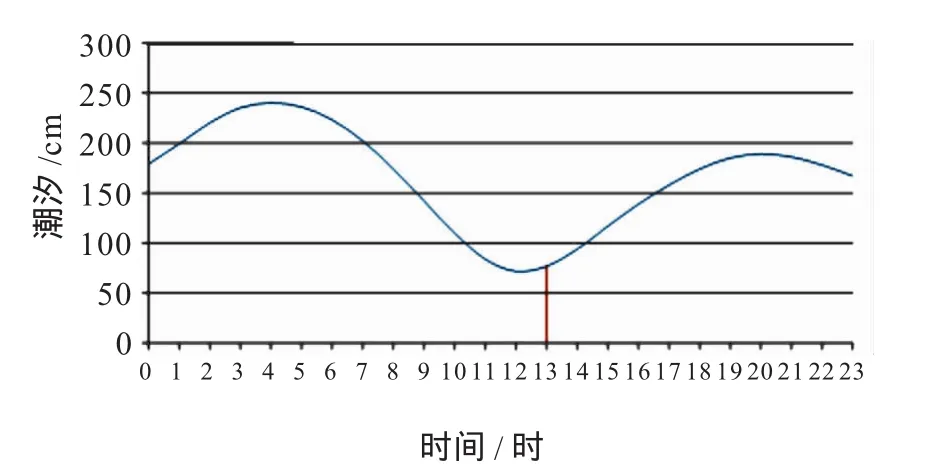
图6 10月3日测潮数据
调载能力分析表明,导管架拖拉装船的最小吃水为4.388 m,相对应的低潮位是(+)0.764 m,因此可知该导管架拖拉装船低潮位受限[6],需要选择合适的潮位点进行拖拉,并准备回拖系统应急备用。
3.2 调载步骤
涠洲11-2 WHPB导管架由3排独立的间断滑靴支撑,按拖拉上船的先后顺序标记各滑靴为C1、B1、A1,考虑到拖拉装船时导管架结构强度、码头强度、导管架重心变化、驳船的调载能力、潮汐变化等因素,导管架拖拉装船的难点在于各个滑靴上船前和上船后导管架的重心变化及驳船荷载分布。由于滑靴承担较大的重力载荷,且导管架重心较高,底部尺寸较小,一旦驳船调载速度与拖拉速度配合不当,运输驳船会与码头滑道之间出现较大的高度差,这也是拖拉装船最危险的工况,会造成导管架结构损坏,甚至倾覆。因此合理设计拖拉速度、拖拉进程控制点、装船中间停顿点是拖拉装船过程的关键。
取各滑靴上船前和滑靴重心上船后为典型工况,将WHPB导管架整个拖拉装船过程分为7个连续步骤(C1滑靴上船前、后,B1滑靴上船前、后,A1滑靴上船前、后,拖拉至设计就位点)。导管架拖拉装船时,最好选择涨潮期为导管架上船时间,涨潮导致驳船船位的升高可补偿部分因导管架的载荷拖拉移位至驳船而导致的驳船船位的降低,这更有利于调载速度、调载时间及调载能力的控制。因而结合前述,当潮位由低潮位涨至0.77 m时,C1滑靴开始上船,并按照设计的调载程序将导管架的结构重量连续转移至驳船的设计位置,避免运输驳船船尾在拖拉过程中出现突然起伏的风险。导管架拖拉上船过程的重量控制见表3。

表3 导管架拖拉装船过程的重量控制
4 现场WHPB导管架拖拉装船的过程
2014年10月在深圳某公司码头将涠洲11-2 WHPB导管架拖拉至某运输驳船上。该导管架的结构特点及项目采用的拖拉装船工艺见前文。
按照导管架拖拉装船程序和调载计算的结果,在低潮位涨至0.77 m时导管架开始上船,将整个拖拉过程按照7个连续步骤进行操作,历时3 h将导管架拖拉至最终设计位置。此次拖拉装船过程中,由于该导管架的三组滑靴均不对称,各组滑靴间横向又均有部分重合,这给导管架拖拉上船时如何精确控制驳船的横、纵倾偏移,稳定性,保持驳船与码头滑道的平齐增加了较大难度,因此拖拉上船阶段是此次装船的重中之重,通过严格执行驳船的设计调载计算结果及导管架的装船程序,安全、平稳地完成了装船的过程。现场的拖拉装船实施情况见图7、8。

图7 滑靴上船过程
5 结束语

图8 导管架拖拉至驳船的设计位置
随着国际油市供应过剩的局面迟迟难以得到改变,低油价带来的冲击波正日渐扩大,部分边际油田的开发也越来越向经济有效的模式发展,各种形式的导管架拖拉装船方法也日趋成熟。但三腿偏心式导管架的拖拉装船涉及的技术难度较大,风险较高。由于导管架结构的特殊性以及重量的分布不均,造成拖拉装船对牵引系统、滑道滑靴设计、驳船调载能力提出了很高的要求,因此应根据具体的结构形式、施工现场的情况、现有的装备资源等条件有针对性地选择工艺方法,并按照规范指导性文件对导管架拖拉装船的每一步骤编制装船调载程序,以确保装船过程的安全。
[1]李新超.超大型导管架滑移装船方法研究[J].中国水运,2013,13(3):33-34.
[2]韩士强,魏佳广,刘吉林,等.文昌19-1N油田导管架安装技术[J].海洋工程,2014,32(5):85-92.
[3]《海洋石油工程设计指南》编委会.海洋石油工程设计指南(第8册):海洋石油工程安装设计[M].北京:石油工业出版社,2007.
[4]郭庆,高静坤.大型导管架的装船分析[J].中国造船,2008,49(S2):316-320.
[5]Guidelines for Loadouts(Report No 0013/NDI)[R].Noble Denton InternationalLtd,2010.
[6]刘钊,黄怀州,荆潇.深水导管架滑移装船强度分析[J].石油和化工设备,2016,19(2):30-33.
Design and Engineering Application ofWZ11-2 WHPBJacket L oad-out
WEIJiaguang,YAN Yalin
Offshore OilEngineering Co.,Ltd.,Tianjin 300461,China
For large size structure with the weight less than 100 MN,load-out technique becomes the major shipment method in the field of ocean engineering.And it has replaced traditional expensive lifting operation of using heavy floating crane and reduced operation cost greatly.This article,taking WZ11-2 WHPB jacket as an example,introduces the influence factors of the load-out process for a three-legged eccentric jacket,including mooring stability,load-out equipment selection,skidway layout,barge draft and barge ballast,etc.Then,it illustrates the whole field load-out process of WZ11-2 WHPB jacket.The engineering practice shows that the designed load-out process is reliable and able to satisfy the engineering requirements of jacket load-out.
jacket;load-out;eccentricity;ballast
10.3969/j.issn.1001-2206.2016.06.007
魏佳广(1986-),男,甘肃白银人,工程师,2011年毕业于辽宁石油化工大学化工过程机械专业,硕士,现主要从事海洋石油平台等设施安装设计及相关技术研究工作。
2016-07-05;
2016-07-25
海洋石油工程股份有限公司工业化/产业化科技创新研发项目(E-0815P019)。
Email:weijg@mail.cooec.com.cn
猜你喜欢
中外文摘(2022年13期)2022-08-02
石油和化工设备(2022年5期)2022-07-11
起重运输机械(2021年24期)2022-01-11
机械管理开发(2021年9期)2021-10-15
大陆桥视野(2020年7期)2020-08-08
星星·诗歌理论(2020年3期)2020-04-24
机械管理开发(2018年12期)2019-01-17
天然气与石油(2018年4期)2018-09-08
船海工程(2015年4期)2016-01-05
中国铸造装备与技术(2015年5期)2015-12-10