基于无模型自适应控制的城轨列车自动驾驶研究
2016-05-09 03:31石卫师
铁道学报 2016年3期
石 卫 师
(南宁轨道交通集团有限责任公司 运营分公司, 广西 南宁 530021)
城轨列车自动驾驶ATO(Automatic Train Operation)系统是城轨列车自动控制的关键设备,其根据列车运行计划、运行速度、当前线路限速和列车状态等信息自动生成目标速度曲线,列车根据目标速度曲线实时计算所需的牵引或制动力的大小,通过列车接口电路,完成列车的加速或减速作业。城轨列车ATO目标速度曲线的精确追踪是保障城轨列车安全、高效、舒适和节能运行的关键环节。目前城轨列车ATO系统研究主要集中在列车ATO运动模型建模和相应追踪控制器设计两方面。
在列车ATO运动模型建模方面,文献[1]根据动力学原理建立列车运动状态模型,但这些模型都是以力作为控制量,忽略了控制力产生的动态过程,不能正确地表征列车的动力学特征。为此,文献[2]提出一种面向控制角度的列车制动模型和模型参数辨识方法,实验仿真表明该模型能够很好地描述列车的运动特性,并且得到相关应用,其中文献[3]和文献[4]分别基于该模型和给定参数进行精确停车控制研究和ATP限速下ATO控制算法研究,但列车ATO系统是一个时变非线性滞后复杂系统,随列车长时间不间断运行,ATO相应的系统参数将会发生变化,因此对于列车在不同运动工况下是否满足相应的控制要求等问题,有待进一步研究。
在ATO目标速度曲线的控制器设计方面,目前的研究大部分集中在PID控制[5-6]、模糊控制[7-8]、神经网络[9]、迭代学习控制[10]等方面,但PID在速度控制过程中需要对加减速度进行多次切换,这样不利于列车的平稳运行,降低乘客的舒适度;模糊控制需要人工建立隶属度函数,划分语言变量,很大程度上取决于专家的实际工程经验,不利于自适应控制和在线调整;神经网络和模糊控制的结合,能够实现在线调整功能,但神经网络加大了算法的计算复杂度,收敛速度较慢,并且容易陷入局部最优;迭代学习在进行高精度追踪控制中需要进行多次学习运算,不能满足ATO高速实时性要求。
同时,由于实际列车一般处于长时间、重负荷运行状态,使得列车的运动特性存在很强的不确定性,列车运动模型具有时滞性、非线性、模型参数不确定等特点,使得以上控制方法的参数调整较为复杂,且很难长期保持优良的控制效果。
针对建模难和带有参数时变的非线性系统的控制问题,侯忠生教授提出了无模型自适应控制MFAC (Model-Free Adaptive Control)理论和方法[11]。MFAC不需要对受控系统进行精确建模,仅利用受控系统的输入输出数据进行控制器的设计和分析,并能实现受控系统的参数自适应控制和结构自适应控制,具有克服时滞、控制非线性闭环、很强的自适应、高鲁棒性、在线调整等功能,目前已经得到了深入的理论研究和广泛的工程应用[12]。
本文将在文献[2]的列车制动模型结构基础上,针对列车运动模型参数的时变性,即列车运动模型部分未知,基于MFAC设计控制器,仅利用ATO系统的输入输出数据,实现对列车ATO目标速度曲线的在线快速精确追踪。
1 列车运动模型
ATO系统是根据列车目标速度、行车许可、运行计划、列车状况和线路情况等信息自动生成牵引或者制动控制指令。ATO控制器通过列车的牵引制动控制系统操纵列车的动力执行机构,以实现列车运行速度的调节和列车的精确停车等功能。因此,可用图1表征从ATO输入到牵引制动控制器的控制指令到最终列车加速度和运行速度等列车运行状态输出3者间的动态过程。
根据图1和文献[2]可得列车运动模型见图2。

图2中u(t)为ATO期望输出速度;A(t)为期望加速度;F(·)为u(t)和A(t)间的静态关系函数,可表示为
A(t)=F(u(t))=f×u(t)+e
( 1 )


( 2 )
2 MFAC控制器设计
在对非线性时变滞后复杂系统设计中,受控对象一般很难用离线时间非线性模型描述。为此,引入伪梯度向量和伪阶数概念,通过一组动态线性时变模型对受控对象进行描述。
非线性时变滞后系统的MFAC设计思想是通过受控系统的输入输出数据在线估计得到伪梯度向量,所以伪梯度向量将根据受控系统的动态特性而动态变化,然后利用伪梯度向量可以得到自适应控制律。
一般离散非线性系统可表示如下
y(k+1)=f(y(k),…,y(k-ny),
u(k),…,u(k-nu))
( 3 )
式中:y(k)、u(k)、ny和nu分别为系统在k时刻的输出、输入及其阶数;f(·)为非线性函数。
对于单输入单输出系统,非线性系统作出如下假设:
假设1f(·)对u(k),u(k-1),…,u(k-nu)分别存在连续的偏导数;
假设2系统的输入输出可观可控,即输入能够控制状态的变化,状态的变化能够由输出反映;
假设3系统的有界输入能量变化产生有界输出能量变化。
以上3个假设并不苛刻。假设1能够包含一大类的非线性系统;假设2和假设3是对受控系统的基本要求,如果无法满足,则系统不可控。
对于假设1,从图2给出的数学模型中可知,列车运动系统对于系统输入存在连续的偏导数;对于假设2,列车根据系统的输入命令产生相应的速度输出,同时列车系统状态参数的变化也会通过速度输出的变化体现出来;对于假设3,由于受到列车结构等因素影响,速度输出是有界的。所以以上3个假设对列车系统是满足的。
处理非线性系统自适应控制问题时,常用的方法是将非线性系统进行线性化。MFAC的动态线性处理方法能将一个复杂的非线性系统在工作点邻域范围内转化为一个带有单时变参数的动态线性系统。
定理1满足假设1~假设3的式( 3 ),在k时刻,一定存在伪梯度向量PPD (Pseudo Partial Derivative)φ(k),使得式( 3 )的泛模型动态线性化表达式为
Δy(k+1)=φ(k)Δu(k)
( 4 )
式中:Δy(k+1)和Δu(k)可表示为

( 5 )
为了使式( 4 )的动态线性处理趋于合理,需要对u(k)加以限制,为此引入以下控制输入准则函数
J(u(k))=
y*(k+1)-y(k+1)2+λu(k)-u(k-1)2
( 6 )
式中:y*(k+1)为系统期望输出;λ是权重因子,其限制了系统输入的变化,被用来保证输入信号具有一定的平滑性。将式( 4 )代入式( 6 )中,对u(k)求导,并令其等于0,有
u(k)=u(k-1)+
( 7 )
式中:ρ(0<ρ≤1)为步长序列。
为了对φ(k)进行估算,引入以下参数估算准则
J(φ(k))=y*(k)-y(k-1)-φ(k)Δu(k-1)2+
μφ(k)-φ(k-1)2
( 8 )
式中:μ是φ(k)估计值变化量的惩罚因子。对式( 8 )中的φ(k)求导,并令其等于0,有
( 9 )
式中:η(0<η≤1)是加入的步长序列,目的是使算法具有更强的灵活性和一般性;ε为一个充分小的正数。
式( 8 )为MFAC控制律算法,式( 9 )为伪梯度向量的估算算法,两式共同构成了MFAC控制器算法,从中可以看出MFAC控制器的设计仅受到系统输入输出数据的影响,不包含系统模型的辨识环节,即与系统的数学模型和阶数无关[12]。
3 基于MFAC的ATO设计
3.1 基于MFAC的ATO控制算法
车载ATO根据来自ATP系统的目标速度曲线,对列车实施牵引或者制动控制,其控制目标是在有限时间区间内对给定计划速度曲线进行完全跟踪。
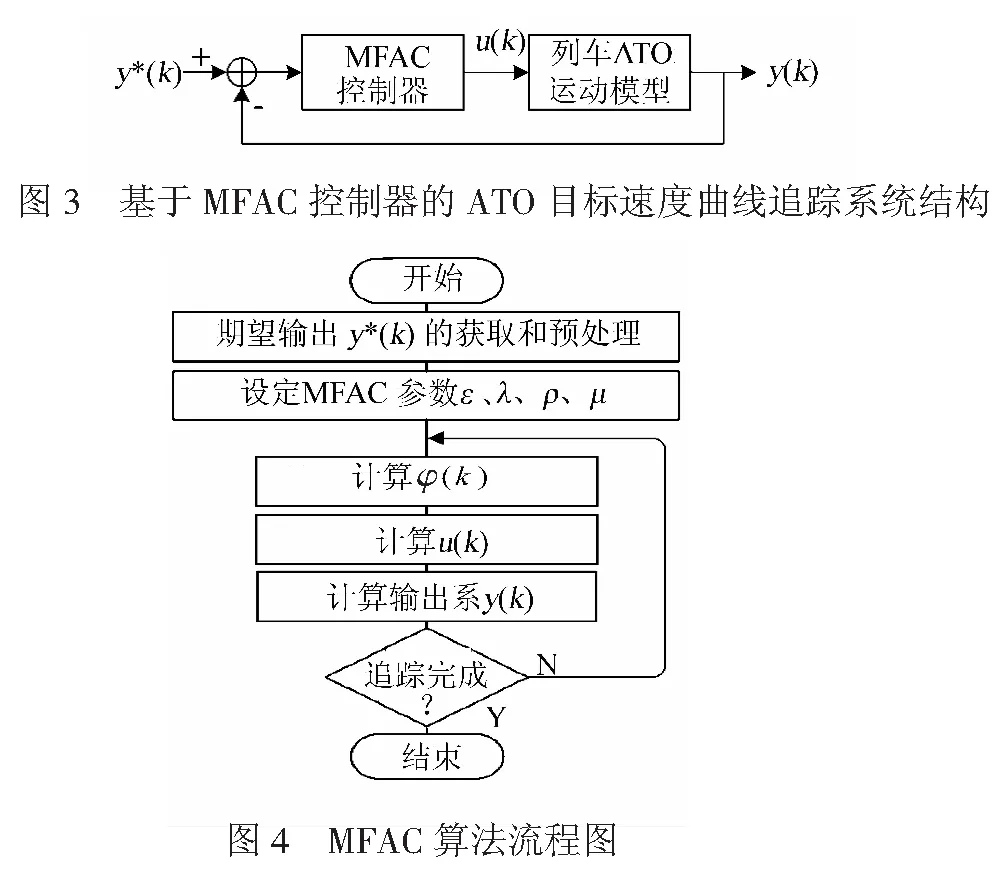
基于MFAC控制器的ATO目标速度曲线追踪系统结构见图3。
图3中y*(k)为在k时刻ATO目标速度期望曲线。y(k)为在k时刻ATO系统输出的实际目标速度,其通过将MFAC控制器的输出u(k)作为图2列车运动模型的输入计算而得的。而u(k)可以通过对MFAC控制参数λ、ρ、μ和η等的设定和对式( 8 )和式( 9 )的计算而获得。
基于图3的算法流程见图4。流程主要包括:算法初始化,计算控制律算子φ(k)和u(k),系统输出等环节。
y*(k)预处理主要是对y*(k)启动阶段很小的一段曲线进行对称化处理,这样做主要是因为MFAC算法在初始运算时需要一段很小的调整间隔,也是几乎所有算法面临的问题。在实际工程应用中,这部分工作可在ATO启动初始化阶段快速完成。
对于MFAC控制参数λ、ρ、μ和η,其具有较好的鲁棒性和较快的收敛速度,且参数调整好后无需再调节。4个参数中,λ对控制器的敏感程度最高,对控制输入变化具有惩罚功能,和系统稳定性有关,所以应首先调节λ,一般从大到小调试,λ越小,系统响应越快,也会引起系统的超调,甚至失稳;反之,λ越大,系统响应越慢,控制输入越平稳。ρ越大,系统收敛速度越快,反之亦然。
3.2 ATO系统性能评价指标
为了评价所选择的控制器对ATO系统的控制效果,需要建立一个对ATO系统的评价标准。本文将从停车精度、运行准点率、舒适度和列车能耗等4方面对ATO系统进行评价。
城轨运营密度大和具有屏蔽门等原因,对列车的位移误差具有很高的要求,因此停车精度是评价控制器的重要指标。ATO的停车精度评价函数为[13]
Ks=st-so
(10)
式中:st和so分别为列车实际停车位置和期望停车位置。
列车的运行准点率评价函数为
(11)
式中:Tt和To分别为列车实际运行时间和期望运行时间。
列车的舒适度是评价控制器的一个重要指标,可通过加速度的变化幅度反映,其评价函数为
(12)
列车能耗评价函数可表示为
(13)
式中:S为两相邻站间距离。
以上4个评价指标,其值越小,说明控制器对ATO系统的控制效果越佳。
4 仿真分析
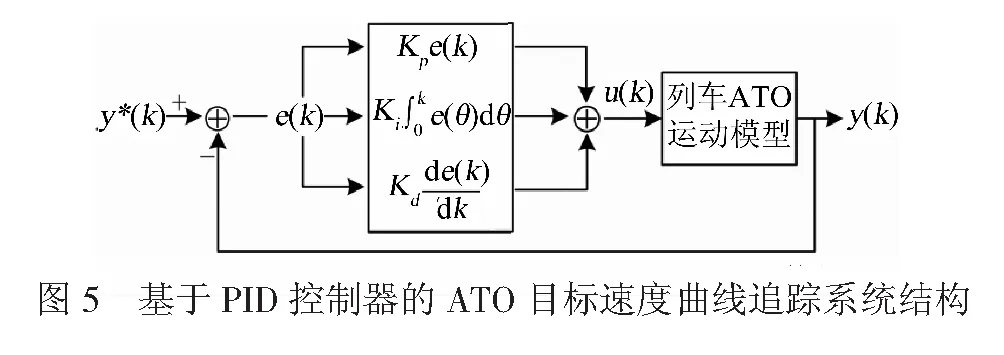
为了验证本文提出的控制方法的有效性,本文将结合南宁地铁1号线的实际情况,对其中的两相邻车站间完整的ATO目标速度曲线进行追踪,对列车加速度等进行仿真,评价本文设计的MFAC控制器对ATO的控制性能。同时,本文还将MFAC控制器和目前广泛应用于ATO控制的PID控制器进行比较,进一步分析MFAC控制器的控制效果。其中,基于PID控制器的ATO目标速度曲线追踪系统结构见图5,Kp、Ki和Kd为PID控制器参数。
仿真步骤如下:根据南宁地铁线路实际情况,辨识出列车运动模型参数、MFAC控制器参数和PID控制器参数;以期望的ATO目标速度曲线作为输入,分别基于图3和图5的曲线追踪方法,计算出实际的ATO目标速度曲线。
其中,所取线路为麻村站到南湖站,站间距为1 657.8 m,计划运行时间为114.9 s,线路允许的最大运行速度为80 km/h。
基于以上的实际线路数据情况,根据文献[2]给出的列车模型参数辨识方法,和文献[13]~[15]提供的MFAC和PID控制器调整参数方法,可获得模型仿真参数,见表1。
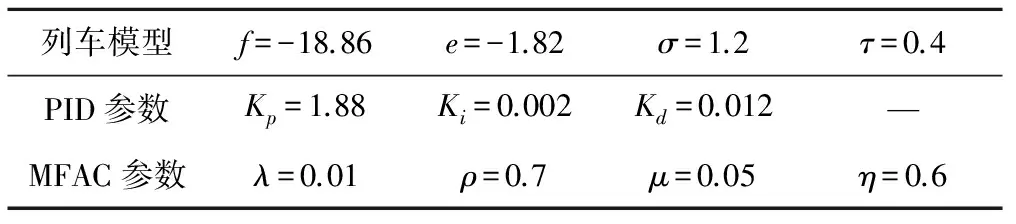
表1 列车模型、PID和MFAC控制器参数
基于MFAC和PID的ATO目标速度曲线追踪仿真结果见图6。

从图6可见,基于MFAC的控制器能够很好地实现对列车ATO目标速度曲线的追踪,实际输出速度和期望输出速度误差很小;而基于PID控制器输出的ATO输出速度低于期望输出速度。可见,MFAC控制器对列车ATO目标速度曲线追踪性能优于PID控制器。
基于MFAC和PID的列车ATO加速度变化仿真结果见图7。

从图7中可见,基于MFAC的ATO加速度输出较平稳,震荡变化次数较少;而基于PID的ATO加速度输出在牵引加速阶段波动较大,在制动减速停车阶段也有一定的小幅波动,整个运动过程震荡变化次数较多。可见,MFAC控制器较PID控制器更有利于列车的平稳运行和保护。
在图6、图7及式(10)~式(13)基础上,基于MFAC和PID的ATO系统性能评价指标见表2。

表2 基于MFAC和PID的ATO系统性能评价指标
由表2可知,MFAC控制器和PID控制器都具有较高的停车精度,大大满足系统要求的停车误差控制在0.3 m范围内;MFAC控制器具有较高的曲线追踪能力,其运行准点率较PID控制器更高;MFAC控制器控制的加速度较平稳,震荡次数较少,其舒适度高,能耗消耗较少。
对南宁地铁1号线所有相邻车站进行仿真,得到以上类似的结果,本文总结得到的结论见表3。

表3 MFAC和PID控制性能对比
5 结束语
列车ATO目标速度曲线是列车ATO系统实现自动驾驶功能的控制曲线,其精确的追踪直接影响到列车的运行安全、运行效率和乘客的舒适度等方面。针对列车ATO系统为非线性时变滞后复杂系统,具有建模难和鲁棒性要求高等特点,本文将无模型自适应控制方法引入到ATO目标速度曲线控制器的设计问题中。本文方法仅需要ATO系统的输入输出数据对列车进行控制,不需要对ATO系统进行精确建模,弥补了传统控制需要精确的数学模型的缺陷。通过与PID控制方法对比,仿真实验表明,基于MFAC的ATO目标速度曲线追踪控制算法,具有追踪效果好,速度误差小,停车精度高、舒适度高,能耗少等特点,总体性能优于PID控制。
参考文献:
[1] 林颖,王长林.基于CBTC的车载ATP安全制动曲线计算模型研究[J].铁道学报,2011,33(8):69-72.
LIN Ying, WANG Changlin. Computational Model of Safe Braking Curve of Onboard ATP Based on CBTC[J]. Journal of the China Railway Society, 2011,33(8):69-72.
[2] 于振宇, 陈德旺. 城轨列车制动模型及参数辨识[J].铁道学报,2011,33(10):37-40.
YU Zhenyu, CHEN Dewang. Modeling and System Identification of the Braking System of Urban Rail Vehicles[J]. Journal of the China Railway Society, 2011,33(10):37-40.
[3] 罗仁士,王义惠,于振宇,等.城轨列车自适应精确停车控制算法研究[J].铁道学报,2012,34(4):64-68.
LUO Renshi, WANG Yihui, YU Zhenyu,et al. Adaptive Stopping Control of Urban Rail Vehicle[J].Journal of the China Railway Society, 2012, 34(4):64-68.
[4] 王义惠,罗仁士,于振宇,等.考虑ATP限速的ATO控制算法研究[J].铁道学报,2012,34(5):59-64.
WANG Yihui, LUO Renshi, YU Zhenyu,et al. Study on ATO Control Algorithm with Consideration of ATP Speed Limits[J]. Journal of the China Railway Society, 2012,34(5):59-64.
[5] 唐涛,黄良骥.列车自动驾驶系统控制算法综述[J].铁道学报,2003,25(2): 98-102.
TANG Tao,HUANG Liangji.A Survey of Control Algorithm for Automatic Train Operation[J]. Journal of the China Railway Society, 2003,25(2): 98-102.
[6] 陈荣武,刘莉,诸昌钤.基于CBTC的列车自动驾驶控制算法[J].计算机应用,2007,27(11):2 649-2 651.
CHEN Rongwu, LIU Li , ZHU Changqian. Automatic Train Operation and Its Control Algorithm Based on CBTC[J]. Journal of Computer Applications, 2007, 27(11):2 649-2 651.
[7] YASUNOBU S, MIYAMOTO S, IHARA H. A Fuzzy Control for Train Automatic Stop Control[J]. Transaction of the Society of Instrument and Control Engineers, 2002,2(1): 1-9.
[8] OSHIMA H, YASUNOBU S, SEKINO S. Automatic Train Operation System Based on Predictive Fuzzy Control[C]//Proceedingsof Industrial Electronics Society Internatinal Conference on Artificial Intelligence for Industrial Applications. New York :I ES, 1988:485-489.
[9] 余进,钱清泉,何正友.两级模糊神经网络在高速列车ATO系统中的应用研究[J].铁道学报,2008,30(5): 52-56.
YU Jin, QIAN Qingquan, HE Zhengyou. Research on Application of Two-degree Fuzzy Neural Network in ATO of High Speed Train[J]. Journal of the China Railway Society,2008, 30(5): 52-56.
[10] 王呈,唐涛,罗仁士.列车自动驾驶迭代学习控制研究[J].铁道学报,2013,35(3):48-52.
WANG Cheng, TANG Tao, LUO Renshi. Study on Iterative Learning Control in Automatic Train Operation[J]. Journal of the China Railway Society, 2013,35(3):48-52.
[11] 侯忠生.无模型自适应控制的现状与展望[J].控制理论与应用,2006,23(4):586-592.
HOU Zhongsheng. On Model-free Adaptive Control: the State of the Art and Perspective[J]. Control Theory & Applications, 2006, 23(4):586-592.
[12] 张强,陈德旺,于振宇. 城市轨道交通ATO系统性能指标评价[J]. 都市快轨交通,2011,24(4):26-29.
ZHANG Qiang, CHEN Dewang, YU Zhenyu. Performance Evaluation of Urban Rail Transit ATO System[J].Urban Rapid Rail Transit, 2011, 24(4):26-29.
[13] 侯忠生,金尚泰.无模型自适应控制:理论与应用[M].北京:科学出版社,2013.
[14] 马洁,陈智勇,侯忠生.大型舰船综合减摇系统无模型自适应控制[J].控制理论与应用,2009,26(11):1 289-1 292.
MA Jie, CHEN Zhiyong, HOU Zhongsheng. Model-free Adaptive Control of Integrated Roll-reducing System for Large Warships[J].Control Theory & Applications, 2009, 26(11):1 289-1 292.
[15] 王伟,张晶涛,柴天佑.PID参数先进整定方法综述[J].自动化学报,2000,26(3):347-355.
WANG Wei, ZHANG Jingtao, CHAI Tianyou. A Survey of Advanced PID Parameter Tuning Methods[J]. ACTA Automatica Sinica, 2000,26(3):347-355.
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2021年12期)2022-01-19
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
自动化学报(2019年6期)2019-07-23
小学生学习指导(低年级)(2019年6期)2019-07-22
自动化学报(2017年11期)2017-04-04
自动化学报(2016年8期)2016-04-16
中国火炬(2014年11期)2014-07-25
筑路机械与施工机械化(2014年4期)2014-03-01