
SMPMSM驱动系统的无位置传感器控制
2016-05-25 00:37李红梅姚宏洋
微特电机 2016年5期
王 萍, 李红梅, 姚宏洋
(合肥工业大学,合肥 230009)
SMPMSM驱动系统的无位置传感器控制
王 萍, 李红梅, 姚宏洋
(合肥工业大学,合肥 230009)
为了实现面装式永磁同步电机(SMPMSM)驱动系统在位置传感器故障下的容错运行,提出基于无模型自适应观测器实现逆变器死区的合理补偿;再通过逆变器参考电压及SMPMSM的定子电流,设计基于微分代数的转子位置估计器,实现SMPMSM驱动系统全速度范围内的转子位置和转速估计。在理论分析的基础上,建立了无位置传感器控制的SMPMSM驱动系统模型,通过系统仿真结果证实所提出的SMPMSM驱动系统无位置传感器控制方案的有效性及技术优势。
SMPMSM驱动系统;微分代数;无模型自适应观测器;死区补偿;无位置传感器控制
0 引 言
永磁同步电机因其具有高效率、高功率密度、体积小和重量轻等优点,在纯电动汽车和混合动力汽车等领域获得了广泛应用。高性能的电机控制依赖于转子位置的准确获取,旋转变压器因其可靠性高、鲁棒性强,抗冲击震动和温度湿度变化能力强等优势,常被选择为电动汽车电驱动系统的位置传感器。但是,由于安装设计或运行原因,旋转变压器输出信号可能出现正交不完善、幅值不平衡、信号偏移等故障,直接影响电驱动系统的高性能转矩控制,在某些运行工况下可能导致系统崩溃,直接危及电动汽车的安全可靠运行。为此,亟需开展全速度范围内永磁同步电机驱动系统无位置传感器控制的研究。
对于电机的无位置传感器控制,目前主要有反电势法[2-3]、扩展卡尔曼滤波法[4-5]和高频信号注入法[6-8]。无位置传感器控制目前所面临的关键技术难点仍然是零速或低速时转子位置和转速的准确估计,虽然可采用高频信号注入法,但这种方法仅适用于凸极永磁同步电机,不适用于面装式永磁同步电机(以下简称SMPMSM),且实现方法复杂,对计算精度要求较高[6]。基于反电动势的估计方法主要适用于中高速的转子位置估计,但由于需要与其它控制算法相结合,导致位置估计器的设计变得复杂[9-10]。
为了简化系统硬件设计和系统实现,本文采用逆变器参考电压来取代电机定子电压,但是,针对电压源型逆变器供电的SMPMSM,逆变器驱动信号中要设置死区时间避免上下桥臂功率开关器件直通,尽管死区时间很短,但死区时间引起的死区效应将使逆变器参考电压与电机定子电压间存在偏差,直接影响SMPMSM的转子位置估计精度[12-13]。为此,本文的实现思路是基于逆变器参考电压和SMPMSM定子电流,设计基于微分代数的转子位置估计器,同时研究基于无模型的逆变器死区时间自适应补偿,实现位置传感器故障时的SMPMSM驱动系统在全速度范围内的无位置传感器运行,提升电动汽车电驱动系统的安全可靠性。
1 SMPMSM数学模型
同步旋转坐标系下的SMPMSM定子电压方程:
(1)
式中:ud,uq,id,iq分别表示电机定子直轴、交轴电压和定子直轴、交轴电流;Rs为定子电阻,Ls为定子电感,ψm为永磁体磁链;ωe表示电机电角速度。
SMPMSM电磁转矩方程:
(2)
式中:Te为电机电磁转矩;p为电机极对数。
机电运动方程:
(3)
式中:J为电机转动惯量;ωm为电机机械角速度,且ωe=pωm;TL表示负载转矩。
2 无位置传感器控制的SMPMSM驱动系统
无位置传感器控制的SMPMSM驱动系统如图1所示,该系统输入为指令转矩,电流调节器采用PI调节的电流双闭环控制,逆变器采用空间矢量脉宽调制(SVPWM),采用基于无模型的逆变器死区时间自适应补偿模块补偿逆变器死区时间引起的电机定子电压和定子电流畸变,再与基于微分代数的位置估计模快相结合,实现SMPMSM驱动系统的无位置传感器运行。

图1 无位置传感器控制的SMPMSM驱动系统
2.1 基于微分代数的转子位置估计器
对于有m个输入、n个状态和p个输出的非线性系统,可表示:
(4)
式中:pi,qi,ri,gi分别代表x的微分多项式;u,x和y分别表示系统输入量、状态量和输出量。
x的可观性将取决于u,y以及它们的各阶微分,若x可观测,则可表示:
(5)
式中:li,si是u,y的微分多项式。
SMPMSM是非线性、多变量和强耦合的时变系统,取两相静止坐标系下定子电压uα,uβ为输入、定子电流iα,iβ为输出,同步旋转dq坐标系下的电流iq,id为状态量,则SMPMSM的状态方程可表示:
(6)
(7)
式中:θ为电机转子位置。
对(7)式左右两边取微分并做代数变换且针对SMPMSM,则有:
(8)
基于微分代数的转子位置估计器具体实现是基于SMPMSM的uα,uβ,iα,iβ信号以及它们的一阶微分,利用式(8)进行转子位置和转速的估计。由式(8)可知:转子位置的获取与转速无关,基于微分代数的转子位置估计器能够实现全速度范围内的SMPMSM转子位置和转速估计。
2.2 基于无模型自适应观测器的逆变器死区时间补偿
基于电流调节器输出的同步旋转坐标系的逆变器的参考电压,经过坐标变换,可获得三相静止坐标系下逆变器的参考电压:
(9)
其中:T2r/3s为同步旋转坐标系与三相静止坐标系间的变换矩阵。
计及逆变器死区时间后的a相定子电压方程可表示:
(10)
式中:va表示电机a相定子电压;ia为定子a相电流。
为了实现逆变器死区时间的非线性补偿,则逆变器参考电压应修改:
(11)
根据式(10)和(11),可得:
(12)
当ΔVdead=0时,则有:
(13)
式中:iaM为a相定子标称电流。

(14)
系统输入准则函数为:
(15)
(16)
其中:ρ∈(0,1),λ>0。
伪偏导数估计表达式:
(17)
其中:η∈(0,1),μ>0。
基于无模型自适应观测器的输出 ,经过坐标变换及定子电流的极性判断,实现逆变器死区时间的合理补偿,自适应生成的补偿电压的表达式:
(18)
其中:T3s/2r为三相静止坐标系与同步旋转坐标系间的变换矩阵。
3 系统建模与仿真
基于MATLAB/simulink软件对无位置传感器控制的SMPMSM驱动系统进行系统建模和仿真研究,仿真中使用的SMPMSM标称参数如表1所示,逆变器死区时间为5μs,电流环PI调节器参数为kp=0.69,ki=0.002 5,无模型自适应观测器的参数设置为ρ=η=0.5,λ=μ=50。

表1 SPMSM参数

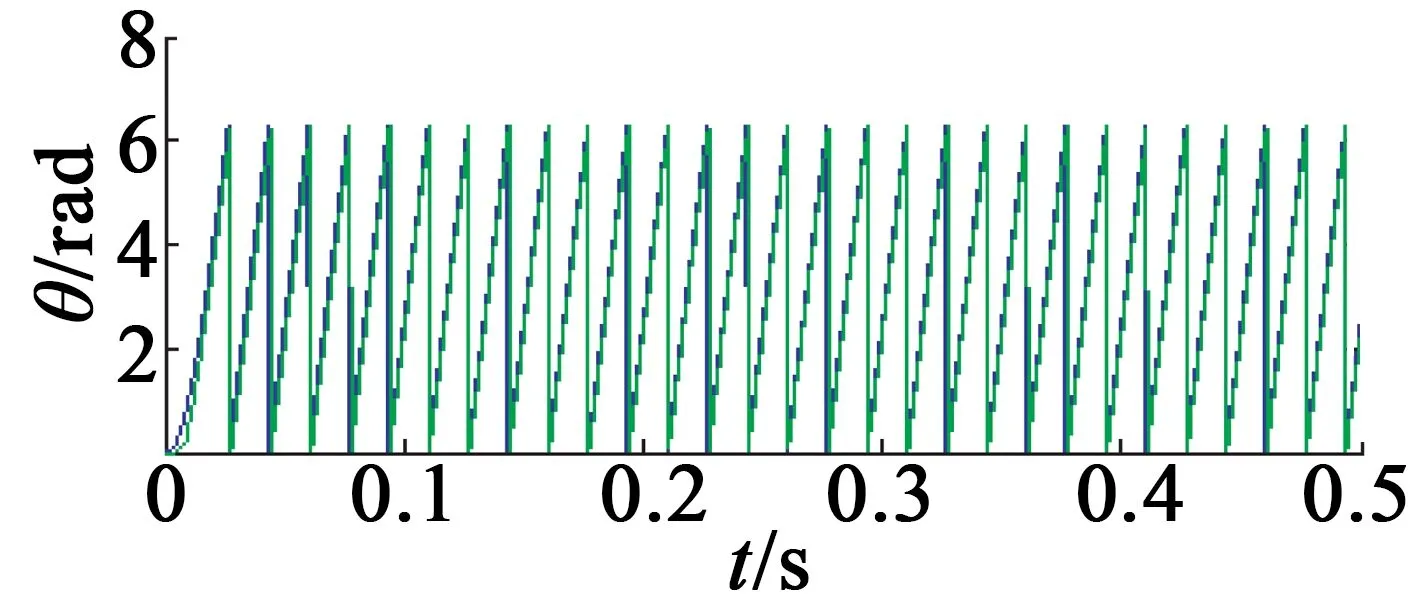
图2 转子位置估计

图3 未实施死区补偿的转子位置估计

图4 实施死区补偿后的转子位置估计
图2为转子位置动态估计,虚线为实际转子位置,实线为估计位置,图3和图4是图2的局部放大,逆变器死区的存在将会造成估计的转子位置出现六倍频的脉动;启用了建议的死区补偿控制后,转子位置估计效果明显改善。
图5为电机a相定子电流波形,从放大图中可以看出,逆变器死区时间的存在,导致定子电流波形畸变,在t=0.3 s实施逆变器死区补偿之后,定子电流不再畸变。图6为SMPMSM转矩波形,放大图清楚地揭示出未补偿逆变器死区影响时的电机转矩脉动较大,死区合理补偿后电机转矩脉动明显减小。

图5 三相定子电流波形

图6 转矩波形
4 结 语
论文构建了基于无位置传感器控制的SMPMSM驱动系统,该系统的特色在于所提出的无模型自适应观测器可实现逆变器死区的合理补偿,再与基于微分代数估计的转子位置和转速估计相结合,实现该系统在位置传感器故障时的无位置传感器运行。系统仿真结果证实了建议的无位置传感器控制的SMPMSM驱动系统能够实现转子位置和转速的准确估计,可望推广应用于电动汽车电驱动系统实现位置传感器故障时的电驱动系统自适应容错运行,提高其安全可靠性。
[1] DRISS AITE Y,YOUSFI D.PMSM sensorless control using back-EMF based position and speed estimation method[C]//2013 International Renewable and Sustainable Energy Conference (IRSEC).2013:436-440.
[2] LARA J,CHANDRA A,XU J.Integration of HFSI and extended-EMF based techniques for PMSM sensorless control in HEV/EV Applications[C]//IECON 2012,38th Annual Conference on IEEE Industrial Electronics Society.IEEE,2012:3688-3693.
[3] VYNCKE T J,BOEL R K,MELKEBEEK J.On extended Kalman filters with augmented state vectors for the stator flux estimation in SPMSMs[C]//Proc. 25th Annu.IEEE Appl. Power Electron.Conf.Expo.IEEE,2010:1711-1718.
[4] WANG Chongwu,HE Yuyao,LI Hong.The study on the PMSM sensorless control using the sub-optimal fading extend Kalman filter[C]//2013 IEEE 10th International Conference on Power Electronics and Drive Systems(PEDS).IEEE,2013:294-297.
[5] ZHU Z Q,GONG L M.Investigation of effectiveness of sensorless operation in carrier-signal-injection-based sensorless control methods[J].IEEE Trans.Ind.Electron.,2011,58(8):3431-3439.
[6] BOLOGNANI S,CALLIGARO S,PETRELLA R,et al.Sensorless control of IPM motors in the low-speed range and at standstill by HF injection and DFT processing[J].IEEE Trans Ind. Appl.,2011,47(1):96-104.
[7] GONG L M,ZHU Z Q.Robust initial rotor position estimation of permanent-magnet brushless AC machines with carrier-signal-injection-based sensorless control[J].IEEE Trans.Ind.Appl.,2013,49(6):2602-2609.
[8] 黄志武,桂卫华,年晓红,等.基于自适应观测器的无速度传感器感应电机控制[J].控制理论与应用,2007,24(6):913-918.
[9] EOM W,KANG I Y,LEE J.Enhancement of the speed response of PMSM sensorless control using an improved adaptive sliding mode observer[C]//IECON 2008,34th Annual Conference of IEEE.IEEE,2008:188-191.
[10] DIAO S,DIALLO D,MAKNI Z,et al.A differential algebraic estimator for sensorless permanent-magnet synchronous machine drive[J]. IEEE Transactions on Energy Conversion,2014,30(1):82-89.
[11] HOU Zhongsheng,JIN Shangtai.Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems[J].IEEE Transactions on Neural Networks,2011,22(12):2173-2188.
[12] HWANG S H,KIM J M.Dead time compensation method for voltage-fed PWM inverter[J].IEEE Transactions on Energy Conversion, 2010, 25(1):1-10.
[13] KIM K H.Simple on-line compensation scheme of nonlinearity in inverter-fed PMSM drive using mrac and Co-ordinate transformation[J].Electronics Letters,2011,47(8):514-515.
Sensorless Control of SMPMSM Drive System
WANGPing,LIHong-mei,YAOHong-yang
(Hefei University of Technology,Hefei 230009,China)
To cope with the position sensor failure, a fault tolerant control system of PMSM was proposed. At first, the model-free adaptive observer was applied to compensate the dead-time of inverter. Then, through the reference voltage of inverter and stator current of SMPMSM, the rotor position estimator based on differential-algebraic theory was constructed. As a result, the rotor position and speed of SMPMSM drive system were obtained in wide speed range. Further, on the base of theoretical analyses, the model of sensorless control of SMPMSM drive system was established. Finally, the effectiveness and technical superiority of the proposed scheme was verified by simulation results.
PMSM drive system; differential-algebraic theory; model-free adaptive observer; dead-time compensation; sensorless control
2015-08-02
国家自然科学基金项目(51377041);国家留学基金项目(20143026)
TM341;TM351
A
1004-7018(2016)05-0036-04
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年2期)2021-06-09
防爆电机(2021年1期)2021-03-29
数学年刊A辑(中文版)(2021年4期)2021-02-12
数学物理学报(2019年5期)2019-11-29
山东冶金(2019年5期)2019-11-16
人生十六七(2016年14期)2016-12-01
