
基于模块化的可重构PMSM伺服驱动系统设计与实现
2016-05-25 00:37潘海鸿林晓词陈伟鸿
微特电机 2016年5期
潘海鸿,林晓词,陈 琳,王 玲,陈伟鸿
(1. 广西大学,南宁 530004;2. 广西制造系统与先进制造技术重点实验室,南宁 530004)
基于模块化的可重构PMSM伺服驱动系统设计与实现
潘海鸿1,2,林晓词1,陈 琳1,2,王 玲1,陈伟鸿1
(1. 广西大学,南宁 530004;2. 广西制造系统与先进制造技术重点实验室,南宁 530004)
以PMSM电机为控制对象,为提高PMSM伺服驱动系统的扩展性、开放性及灵活性,提出基于模块化、层次化的伺服驱动控制系统设计思想。基于DSP芯片TMS320F28335进行自主开发模块化、可重构PMSM伺服驱动系统的研究;并给出可重构的PMSM伺服驱动控制系统架构规划,以实现根据实际工况快速重构控制系统,最终满足用户多样化和个性化控制需求。在搭建的PMSM伺服驱动系统平台进行速度控制模式和位置控制模式重构实验,实验结果表明所提出的可重构伺服驱动系统设计方法是可行有效的,且设计灵活,可重构性强,易于扩展。
可重构;伺服驱动系统;模块化;软件架构;控制策略
0 引 言
交流永磁同步电机伺服驱动系统(以下简称PMSM伺服驱动系统)以其调速范围宽、控制精度高、动静态响应特性好和鲁棒性好等特点,广泛应用于数控机床、工业机器人、电子制造机械、航天航空设备及柔性制造系统等领域[1]。
目前国内外已经研制出许多不同品牌和性能的商用伺服驱动器,如安川、松下、东元、台达等,但这些商用驱动器的开放程度不高。商用伺服驱动器的控制板卡通常采用专用封闭式设计方法,软件系统被固化在控制板卡中,每个控制环路的控制策略单一,导致伺服驱动系统难以扩展,缺乏灵活性和开放性,无法适应复杂多变的应用场合及性能要求[2]。以数控系统应用为例。为保证数控系统的精度及鲁棒性,数控系统通常采用闭环控制,从内到外为电流环、速度环和位置环。根据数控系统不同的控制需求,数控系统的运动控制器和伺服驱动器可组成三种结构形式[3],如图1所示。伺服驱动系统分为转矩控制、速度控制、位置控制三种控制模式,分别接收上位机的模拟转矩指令、模拟速度指令和脉冲指令。商用伺服驱动器为上位机提供了三种控制结构所需的指令输入接口和反馈接口,但内部功能固定,用户只能使用驱动器所提供的标准功能,难以根据自己的性能要求对伺服驱动系统进行二次开发和设计,使伺服驱动系统的扩展和修改十分有限,造成用户对伺服驱动系统供应商的依赖,难以将自己的相应专业技术、控制算法等嵌入到伺服驱动系统中,无法实现对伺服驱动系统的重构[3-4]。因此,自主研究和设计模块化、可重构PMSM伺服驱动控制系统,使用户能够根据控制需求,对系统结构和控制策略等进行重构,提高PMSM伺服驱动系统的扩展性、开放性及灵活性,具有很大必要性和实用价值。
为此,本文对PMSM伺服驱动系统可重构性进行分析,采用模块化、层次化的设计方法,提出可重构软件架构设计思想;并设计具有开放性、可重构性的伺服驱动系统软件架构。最后在搭建的自主开发基于DSP TMS320F28335伺服驱动系统平台上进行实验验证。

(a) 伺服驱动器层为转矩控制结构

(b) 伺服驱动器层为速度控制结构
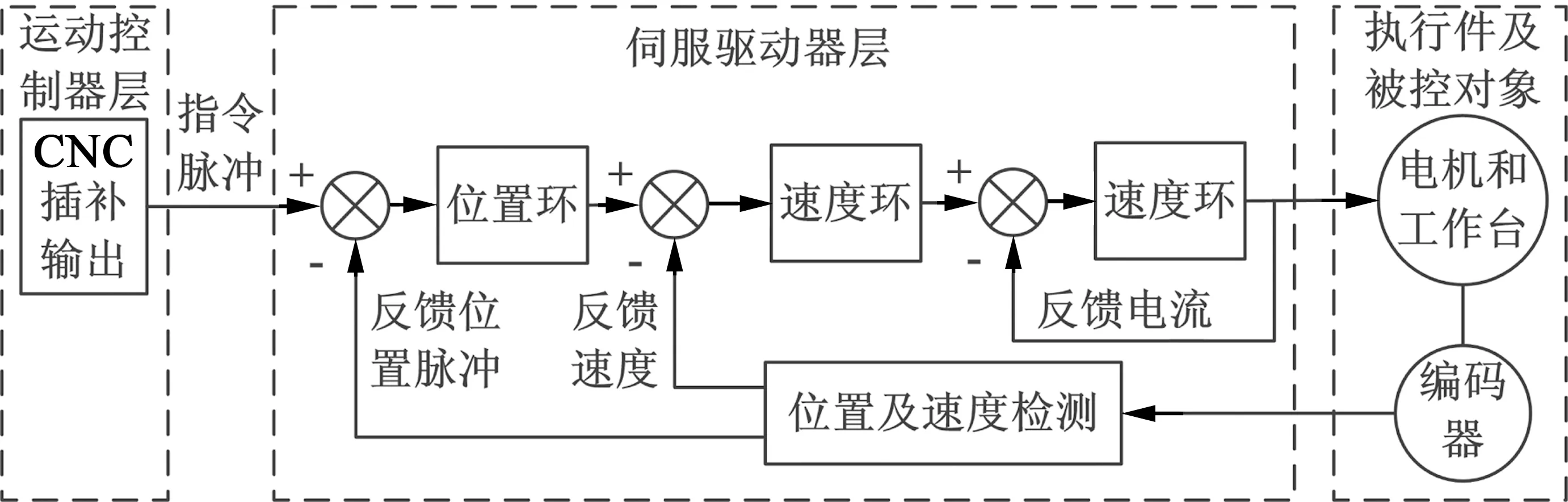
(c) 伺服驱动器层为位置控制结构
1 控制策略可重构分析
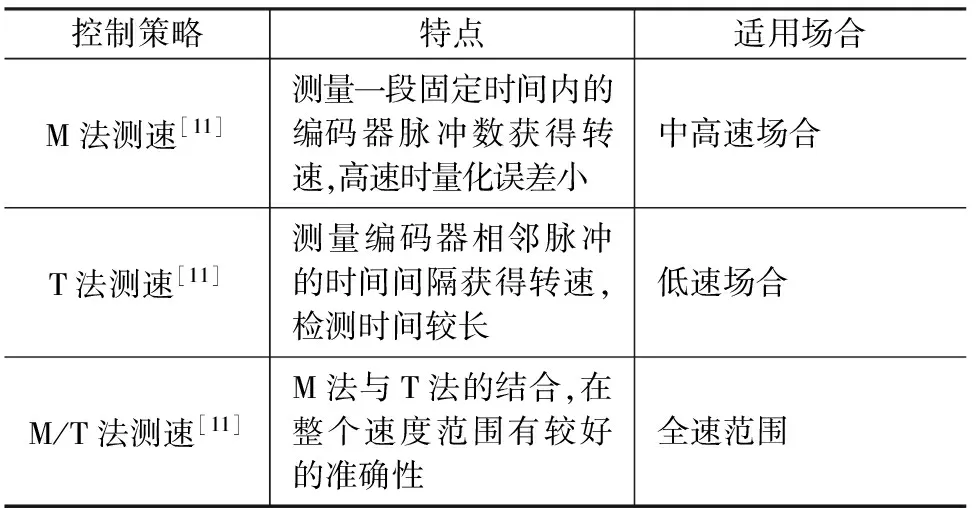
为达到交流永磁同步电机稳、准、快的性能指标,众多学者提出了很多控制策略,目前伺服驱动器中常用的控制策略有PID控制、复合控制、加减速控制、预测控制等。这些控制算法可在一定程度上使系统获得较好性能,但也存在一些不足,各有特点及应用场合,如表1所示。
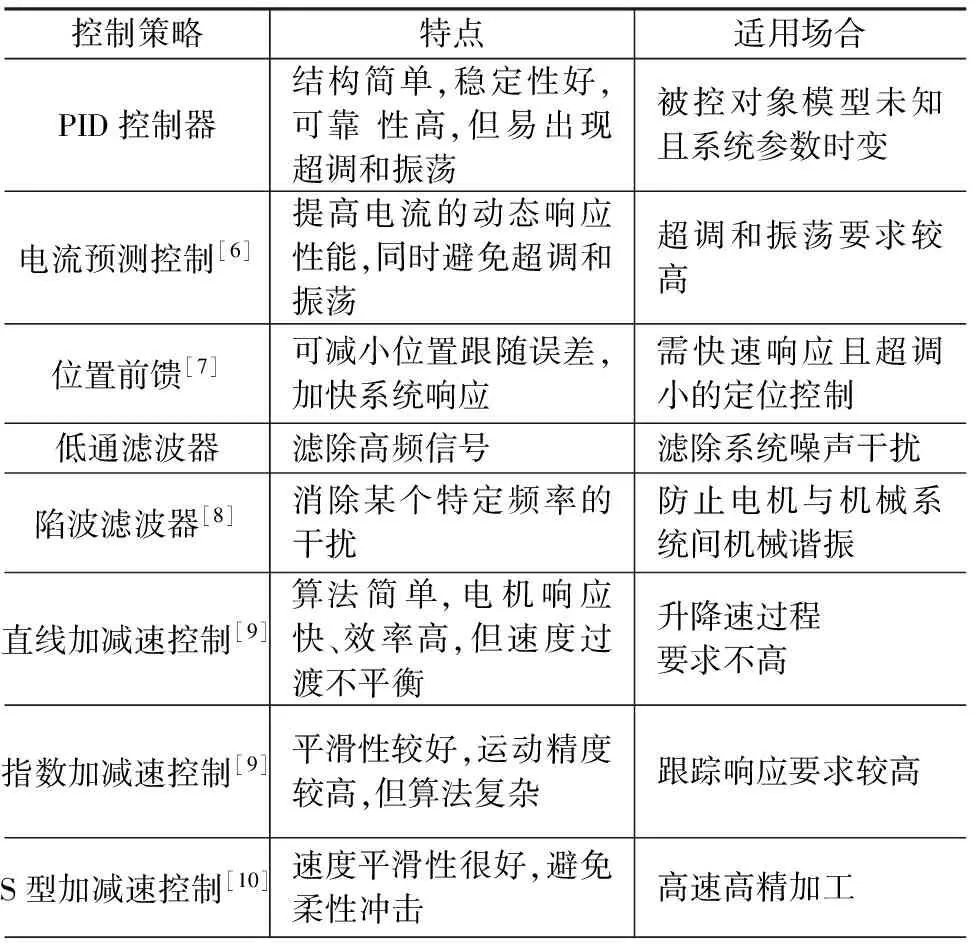
表1 控制策略的特点及适用场合
续表
随着市场需求的发展,对伺服驱动系统的性能要求越来越高,采用单一控制策略的伺服驱动系统已无法适应复杂多变的应用需求[5]。针对不同环境和不同条件,应采用不同的控制策略以获得更实用、性能更优越的伺服驱动系统,因此,控制策略的可重构性是十分必要的。
2 模块化、可重构PMSM伺服驱动系统软件设计
2.1 软件架构设计思想
为满足复杂多变的工业应用需求,采用模块化、层次化设计方法,基于实验室已有研究成果,提出具有开放性、可重构性的伺服驱动系统软件架构思想[3-4,12],如图2所示,其核心思想:(1)每个功能模块完成单一的功能,各功能模块间相互独立;(2)依据各模块的功能属性划分功能模块框架,每个功能模块都有与其一一对应的框架,各功能模块间只通过功能模块框架进行数据交互,保证功能模块间没有直接的数据耦合,便于添加或裁剪;(3)各功能模块框架中都设置有一个重构器,通过重构器控制功能模块的调用状态,在系统中随时对各模块进行调用,根据控制需求和信息流重构整个系统拓扑结构。

图2 软件架构设计思想框图
2.2 功能模块划分
结合PMSM伺服驱动系统可重构性分析及目前伺服驱动系统功能特点,提出PMSM伺服驱动系统控制框图,如图3所示。整个控制系统由基础模块和可重构模块组成,基础模块是指与电流控制有关的较通用模块,主要包括:相电流采样、位置检测、克拉克变换、帕克变换和帕克逆变换、SVPWM占空比计算模块和占空比更新模块等,通常不参与重构。可重构模块是指在控制过程中可根据控制需求利用重构器添加或裁减的模块,主要有S型曲线加减速、直线加减速、指数加减速、PID控制器、前馈控制器、电流预测控制、陷波滤波器、低通滤波器、M法测速、T法测速和M/T法测速模块等。重构器的符号说明如表2所示,根据控制要求利用重构器实现对可重构模块的调用,构成所需系统结构。

图3 可重构PMSM伺服驱动系统控制框图

表2 功能模块重构器符号说明
2.3 软件架构设计
采用模块化层次化设计方法,设计PMSM伺服驱动系统软件架构,如图4所示。PMSM伺服驱动系统软件结构主要分为6层:(1)系统主框架层由背景处理框架和中断处理框架组成。背景处理框架是整个软件系统程序入口,主要完成处理器内部资源、硬件配置及系统参数的初始化;中断处理框架执行周期性实时任务,调用轴管理框架层中与电机控制有关的各功能函数。(2)轴管理框架层完成与系统主框架层的通信,调用执行各功能模块框架,并处理各功能模块框架间的通信。(3)功能模块框架层负责与轴管理框架层和功能模块层的通信,同时可直接对硬件接口驱动层控制。根据功能属性划将功能模块框架分为:①基础功能模块框架:坐标变换框架、执行系统框架和监控系统框架;②可重构功能模块框架:设定点发生器框架、测量系统框架、控制器框架。可重构功能模块框架利用功能模块重构器对功能模块进行动态调用。(4)功能模块层中各功能模块主要完成单一的功能,通过功能模块框架层进行调度和管理。(5)硬件接口驱动层用于配合相应硬件接口完成伺服系统与外部设备的数据处理和硬件驱动。(6)硬件接口层主要包括编码器接口、ADC接口、PWM接口、运动指令输入接口、数字I/O接口、SCI接口、以太网接口和按键接口等,负责与电机、上位机数据交互。所提出的伺服系统软件架构基于DSP TMS320F28335采用C语言开发完成。

图4 PMSM伺服驱动系统软件架构
采用层次化、模块化的软件架构,主要特点:(1)层次分明,功能模块耦合低,系统结构清晰,便于系统的开发、移植、维护及扩展;(2)系统硬件与软件分离,仅需更改硬件接口及驱动即可将软件架构应用于新系统,减少系统的开发成本及时间;(3)功能模块相互独立,由功能模块框架层执行各功能模块的信息交互及存储,便于管理和调度;(4)根据控制需求及性能指标,通过框架层的重构器对功能模块进行动态重构,从而重构出所需的控制结构及控制模式,以控制电机完成期望的运动。
3 实验验证
本文搭建了如图5所示PMSM伺服驱动系统平台,该平台由基于DSP TMS320F28335自主研发的伺服驱动器、伺服驱动系统性能测试系统、东元TSDA电机及机械平台组成。所采用的电机为东元TSDA电机,型号为TSB08751C,功率为750 W,额定电流为3.4 A,额定转速为3 000 r/min,额定转矩为2.39 N·m。自主研发的PMSM伺服驱动器位置环、速度环和电流环周期分别设置为6.25 ms,0.625 ms,0.125 ms。

图5 PMSM伺服驱动系统实验平台
(1)速度控制模式
依图1(b)将伺服驱动系统重构为速度控制模式,加减速方式选择指数加减速法,测速方式选择M/T法。参照前述可重构控制框图(图3)和重构器符号说明(表2)进行系统重构,控制模式重构器置为2,加减速重构器置为0,测速方式重构器置为3,构成速度闭环回路。给定参考速度命令分别为10 r/min,100 r/min,800 r/min,1 500 r/min,3 000 r/min,各速度响应曲线如图6所示。可知,该可重构伺服驱动系统可实现全速段平稳运行,起动时无明显超调,稳态误差较小,速度响应快,在3 000 r/min时速度响应时间最大约为0.25 s。

图6 速度控制模式低、中、高速时的速度响应
(2)位置控制模式
依图1(c)将伺服驱动系统重构为位置控制模式,位置控制器分别采用比例和前馈的复合控制策略和比例控制策略,测速方式选择M/T法。参照前述可重构控制框图(图3)和重构器符号说明(表2)进行重构,控制模式重构器置为3,测速方式重构器置为3,采用复合位置控制策略时,位置控制重构器置为1,构成位置闭环回路。
给定位置脉冲命令300000个脉冲,两种控制策略的位置和速度响应曲线如图7所示。两种控制策略下系统均完成300 000脉冲的定位要求,采用复合控制策略系统动态跟随特性比采用比例控制策略得好,定位时间更短,并且有较高的动态跟踪精度,重构的伺服驱动系统可满足控制需求。

图7 两种位置控制策略下的位置和速度响应曲线
上述实验从控制结构重构和控制策略重构两个方面证实所提出基于模块化思想的伺服驱动系统具有可重构性的,PMSM伺服驱动系统可根据不同应用场合进行重构,满足所需性能要求,体现了模块化、可重构PMSM伺服系统软件架构的设计具有良好的灵活性、适应性。
4 结 语
基于DSP TMS320F28335按照所提出的模块化、层次化软件架构设计思想,自主开发具有模块化、可重构特征的PMSM伺服系统软件架构。该系统通过将功能模块完全解耦,即每个功能模块完成单一的功能,利用框架层的重构器对功能模块进行动态重构,方便用户根据特定的控制需求添加或裁减功能模块。在自主开发的PMSM伺服驱动系统实验平台,进行速度控制模式和位置控制模式重构实验,实验结果表明所设计的伺服系统能够对系统控制结构和控制策略进行重构进而满足所要求的性能指标,具有良好的灵活性、适应性,并拓宽PMSM伺服驱动系统的应用范围。
[1] 黄声华,吴芳.永磁交流伺服系统国内外发展概况[J].微特电机,2008,36(5):52-56.
[2] 吴钦木,李叶松.一种交流伺服系统开放式可重构控制器研究[J].微电机,2009,42(3):47-51.
[3] 杨增启. 可重构PMSM伺服驱动系统研究与软件设计[D].南宁:广西大学,2014.
[4] 陈琳, 潘海鸿, 孙红涛, 等. 一种以轴为单位模块化可重构的运动控制系统:201110045958.9[P].2011-12-21.
[5] 辛小南,贺莉,王宏洲.永磁同步电动机交流伺服系统控制策略综述[J].微特电机,2010,38(2):67-70.
[6] 牛里,杨明,刘可述,等.永磁同步电机电流预测控制算法[J].中国电机工程学报,2012,32(6):131-137.
[7] 蒋锐权,王小椿.数字前馈位置控制算法的研究[J].机械与电子,1998(6):36-38.
[8] WANG Chunmei,XIAO Weicai.Second-order IIR notch filter design and implementation of digital signal processing system[J].Applied Mechanics and Materials,2013,347:729-732.
[9] 许良元,桂贵生,彭丹丹.高速加工中加减速控制的研究[J].中国制造业信息化,2006,34(2):124-126.
[10] 潘海鸿,杨微,陈琳,等.全程S曲线加减速控制的自适应分段NURBS 曲线插补算法[J].中国机械工程,2010,21(2):190-195.
[11] 姜庆明,杨旭,甘永梅,等.一种基于光电编码器的高精度测速和测加速度方法[J].微计算机信息,2004,20(6):48-49.
[12] 陈琳,钟文,潘海鸿,等.一种可重构的交流伺服驱动控制系统:CN103684175A[P].2014-03-26.
Design and Implementation of Reconfigurable PMSM Servo Drive System Based on Modularization Strategy
PANHai-hong1,2,LINXiao-ci1,CHENLin1,2,WANGLing1,CHENWei-hong1
(1.Guangxi University,Nanning 530004,China;2.Guangxi Key Laboratory of Manufacturing System & Advanced Manufacturing Technology,Nanning 530004,China)
Based on the DSP core control chip TMS320F28335, a PMSM servo drive system was developed independently to realize the control of PMSM, which features modularized and reconfigurable. To improve the expansibility, openness and flexbility of PMSM servo drive system, the design idea of servo drive control system was proposed using modular and hierarchical strategy; architecture planning of reconfigurable PMSM servo drive system was given as well, therefore the control system can be rapidly reconstructed on practical condition, and the diversitied and personalized requirements of the customers were satisfied in final. The platform of PMSM servo drive system was built, and reconfiguration experiments of speed control mode and position control mode were performed on the platform. Experimental results demostrate feasibility and validity of the design presented. The architecture has characteristic of flexible design, easy extension and strong reconfigurability.
reconfigurable; servo drive system; modularization; software architecture; control strategy
2015-06-24
国家自然科学基金项目(51465005);广西制造系统与先进制造技术重点实验室项目(14-045-15S09)
TM341;TM351
A
1004-7018(2016)05-0040-04
潘海鸿(1966-),博士,教授,研究方向为高速高精度运动控制、数控技术。
猜你喜欢
海洋信息技术与应用(2022年1期)2022-06-05
北华大学学报(自然科学版)(2021年3期)2021-07-13
现代装饰(2020年5期)2020-05-30
电脑爱好者(2020年6期)2020-05-26
北京航空航天大学学报(2017年5期)2017-11-23
中国核电(2017年2期)2017-08-11
流程工业(2017年4期)2017-06-21
软件导刊(2016年9期)2016-11-07
通信电源技术(2016年5期)2016-03-22
自动化仪表(2015年11期)2015-04-01
